
基于随机目标的多无人机协同搜索方法研究的开题报告.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于随机目标的多无人机协同搜索方法研究的开题报告.docx
基于随机目标的多无人机协同搜索方法研究的开题报告一、选题背景近年来,随着无人机技术的不断发展和应用场景的扩大,无人机在搜救、灾后救援、监测等领域中得到了广泛应用。然而,当需要对一个较大的区域进行搜索时,由于无人机数量限制和搜索范围广大等问题,搜索效率较低,如何提高搜索效率成为了一个迫切需要解决的问题。因此,本课题主要研究基于随机目标的多无人机协同搜索方法,通过采用一定的随机化方法,将搜索任务分配给多架无人机,提高搜索效率和效果。二、研究内容及方法1.研究内容本课题的主要研究内容包括以下三个方面:(1)建立

面向动态目标的多无人机协同搜索方法研究.docx
面向动态目标的多无人机协同搜索方法研究随着无人机应用在多个领域的普及,无人机相关技术也在不断地发展。在无人机协同搜索领域,传统的多无人机搜索方法没有充分考虑到目标的动态性,而面向动态目标的多无人机协同搜索方法可以更加高效地完成搜索任务。一、传统多无人机搜索方法的缺陷传统的多无人机搜索方法通常采用固定模式的搜索方式,安排无人机在搜索范围内按照规定的路径进行搜索,或者对整个搜索区域进行网格化划分搜索。但这种做法存在以下问题:1.无法有效应对动态目标的搜索在一个飞行速度较慢的固定模式下进行搜索时,难以快速跟踪动

面向动态目标的多无人机协同搜索方法研究的任务书.docx
面向动态目标的多无人机协同搜索方法研究的任务书任务书一、前言在近年来,无人机技术的飞速发展,无人机被广泛应用于军事、民用领域。无人机可以完成传统方式难以实现的任务,如实时采集大量信息,动态监测目标,快速搜索区域等。无人机在多无人机协同搜索中的应用,可以大大提高搜索效率和准确性。然而,在多无人机协同搜索中,由于任务情况复杂,团队内部协作密切,需要精细的规划和协调。因此,开展面向动态目标的多无人机协同搜索方法研究任务是创新性和实用性的,该研究成果对于提高无人机搜索效率具有重要意义。二、任务目的1.掌握无人机搜
基于感知-锁定-发现的多无人机博弈协同搜索方法.pdf
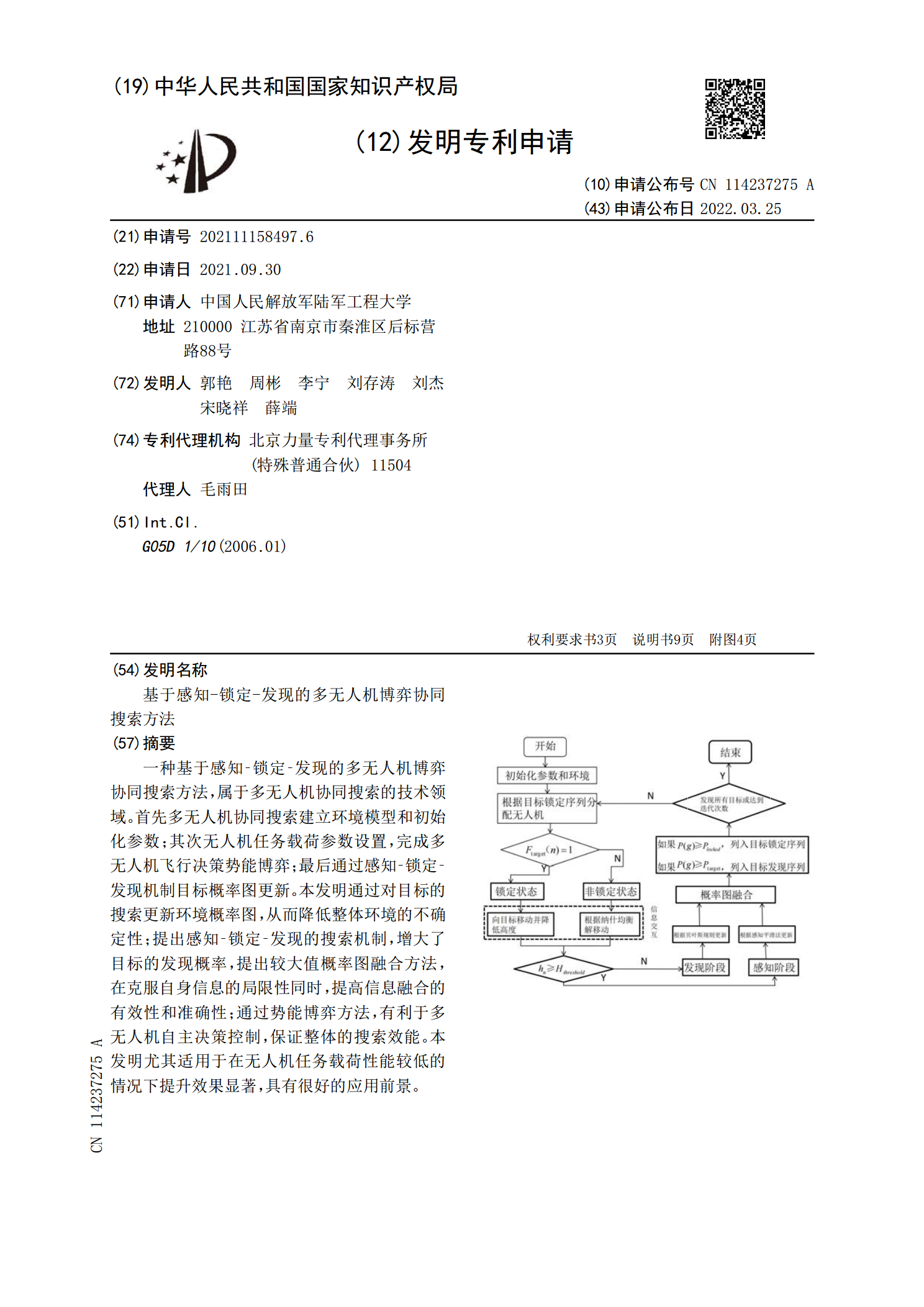
一种基于感知‑锁定‑发现的多无人机博弈协同搜索方法,属于多无人机协同搜索的技术领域。首先多无人机协同搜索建立环境模型和初始化参数;其次无人机任务载荷参数设置,完成多无人机飞行决策势能博弈;最后通过感知‑锁定‑发现机制目标概率图更新。本发明通过对目标的搜索更新环境概率图,从而降低整体环境的不确定性;提出感知‑锁定‑发现的搜索机制,增大了目标的发现概率,提出较大值概率图融合方法,在克服自身信息的局限性同时,提高信息融合的有效性和准确性;通过势能博弈方法,有利于多无人机自主决策控制,保证整体的搜索效能。本发明尤

基于改进PRM算法的多无人机协同航迹规划研究的开题报告.docx
基于改进PRM算法的多无人机协同航迹规划研究的开题报告摘要:本文研究的是基于改进PRM算法的多无人机协同航迹规划问题。在现代航空领域中,多无人机单元协同飞行已成为一个热门研究课题。合理的协同飞行规划对于提高飞行效率和安全性具有重要的意义。提出了改进的PRM算法,结合最短路径算法实现无人机航迹规划。该算法兼顾了无人机间的协同与个体航迹规划,以及避障和路径优化的问题。实验结果表明,该算法能够有效地规划无人机的航迹,实现无人机的安全协同飞行。1.研究背景无人机随着科技的进步得到了广泛的应用。无人机具有长时间飞行