
车辆辅助制动方法、电子设备及存储介质.pdf

灵慧****89


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆辅助制动方法、电子设备及存储介质.pdf
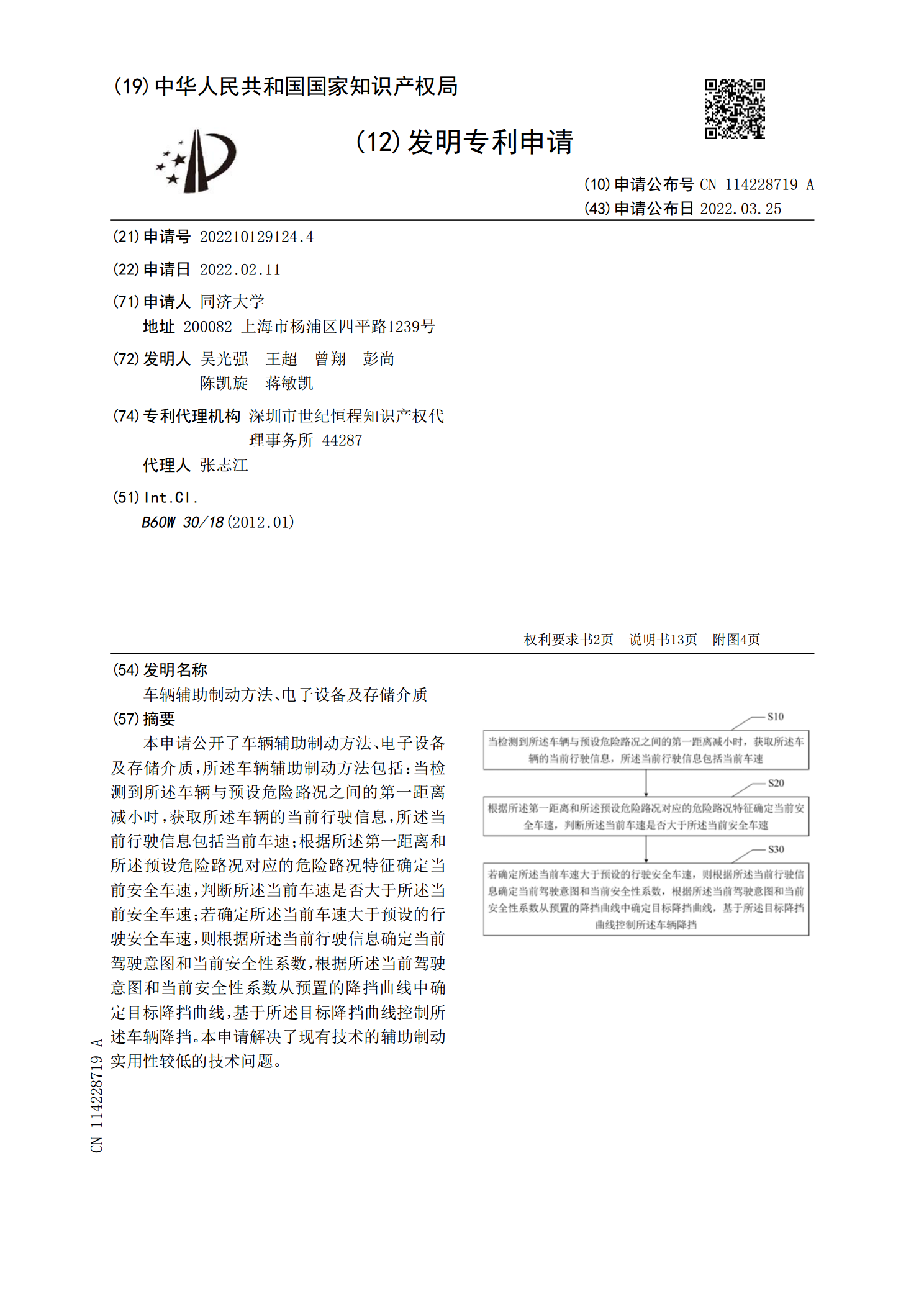
本申请公开了车辆辅助制动方法、电子设备及存储介质,所述车辆辅助制动方法包括:当检测到所述车辆与预设危险路况之间的第一距离减小时,获取所述车辆的当前行驶信息,所述当前行驶信息包括当前车速;根据所述第一距离和所述预设危险路况对应的危险路况特征确定当前安全车速,判断所述当前车速是否大于所述当前安全车速;若确定所述当前车速大于预设的行驶安全车速,则根据所述当前行驶信息确定当前驾驶意图和当前安全性系数,根据所述当前驾驶意图和当前安全性系数从预置的降挡曲线中确定目标降挡曲线,基于所述目标降挡曲线控制所述车辆降挡。本申
车辆制动方法、装置、电子设备及存储介质.pdf
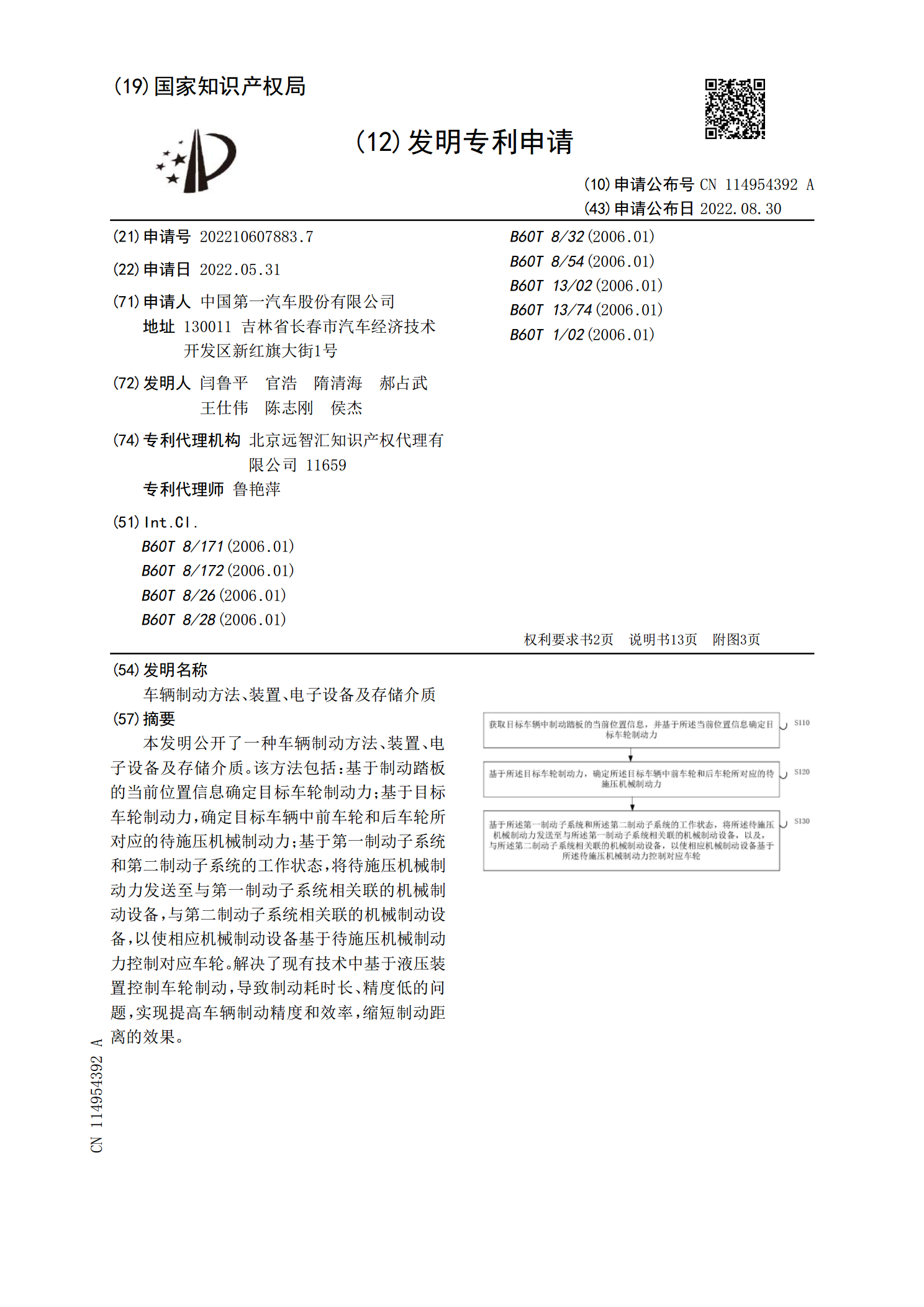
本发明公开了一种车辆制动方法、装置、电子设备及存储介质。该方法包括:基于制动踏板的当前位置信息确定目标车轮制动力;基于目标车轮制动力,确定目标车辆中前车轮和后车轮所对应的待施压机械制动力;基于第一制动子系统和第二制动子系统的工作状态,将待施压机械制动力发送至与第一制动子系统相关联的机械制动设备,与第二制动子系统相关联的机械制动设备,以使相应机械制动设备基于待施压机械制动力控制对应车轮。解决了现有技术中基于液压装置控制车轮制动,导致制动耗时长、精度低的问题,实现提高车辆制动精度和效率,缩短制动距离的效果。
车辆制动控制方法、装置及电子设备、存储介质.pdf
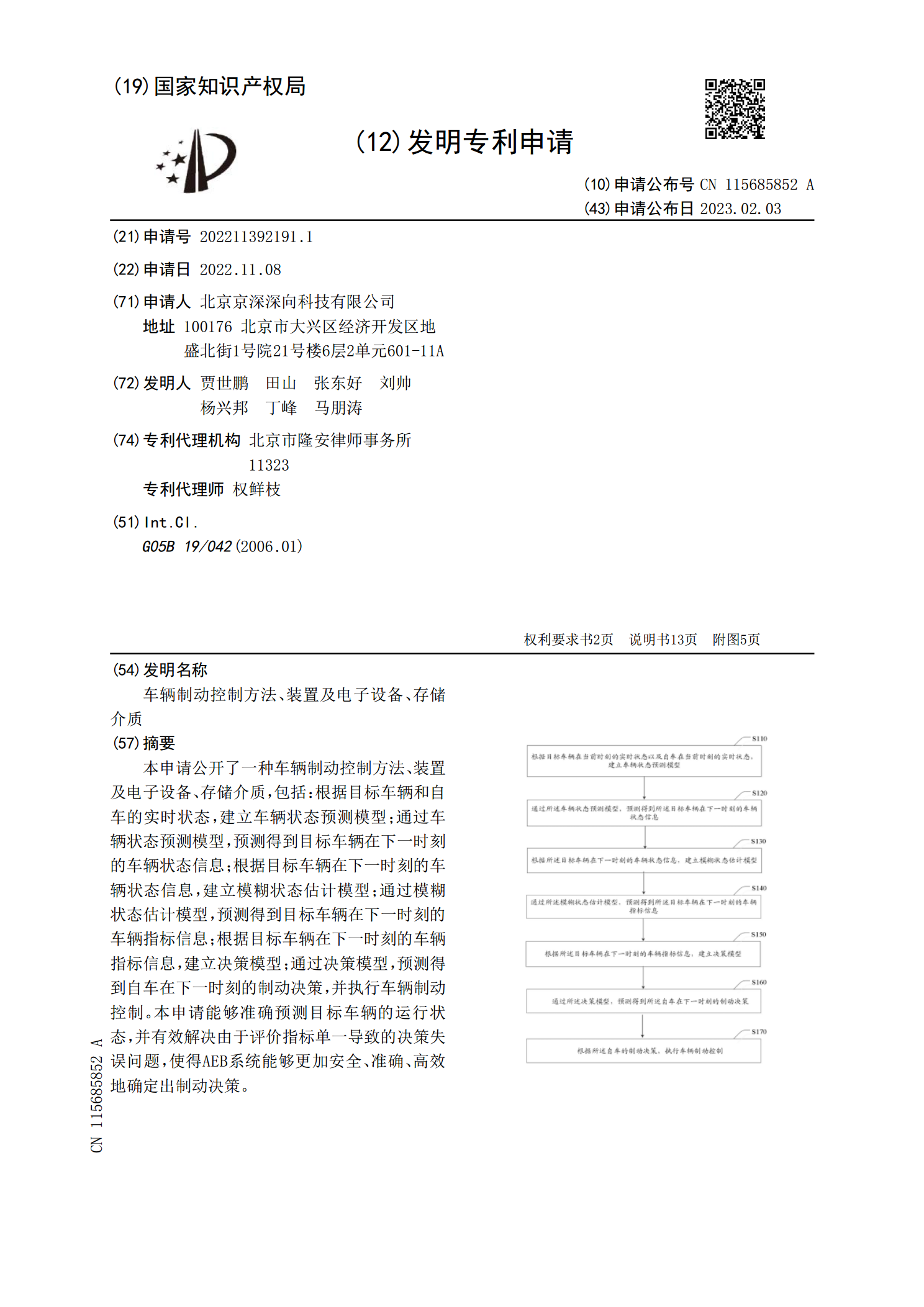
本申请公开了一种车辆制动控制方法、装置及电子设备、存储介质,包括:根据目标车辆和自车的实时状态,建立车辆状态预测模型;通过车辆状态预测模型,预测得到目标车辆在下一时刻的车辆状态信息;根据目标车辆在下一时刻的车辆状态信息,建立模糊状态估计模型;通过模糊状态估计模型,预测得到目标车辆在下一时刻的车辆指标信息;根据目标车辆在下一时刻的车辆指标信息,建立决策模型;通过决策模型,预测得到自车在下一时刻的制动决策,并执行车辆制动控制。本申请能够准确预测目标车辆的运行状态,并有效解决由于评价指标单一导致的决策失误问题,

车辆制动控制方法、系统、电子设备及存储介质.pdf
本发明提供一种车辆制动控制方法、系统、电子设备及存储介质,车辆制动控制方法包括:采集车内声音和至少一车内图像;以及,在所述车内声音符合制动声音条件且所述车内图像中的至少一张车内图像符合对应的制动图像条件时,触发车辆制动信号。本发明通过车内声音和车内图像的采集,从声音内容、声音音量、声音时长和音源,以及图像内容等多个角度进行判断,准确检测车内危险,从而触发车辆制动信号,保障车内人员及车辆安全。
车辆制动控制方法、系统、电子设备及存储介质.pdf
本发明提供一种车辆制动控制方法、系统、电子设备及存储介质,车辆制动控制方法包括:采集车内声音和至少一车内图像;以及,在所述车内声音符合制动声音条件且所述车内图像中的至少一张车内图像符合对应的制动图像条件时,触发车辆制动信号。本发明通过车内声音和车内图像的采集,从声音内容、声音音量、声音时长和音源,以及图像内容等多个角度进行判断,准确检测车内危险,从而触发车辆制动信号,保障车内人员及车辆安全。