
一种用于声场和磁场正交定位的神经导航定位系统.pdf

是你****元呀

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于声场和磁场正交定位的神经导航定位系统.pdf
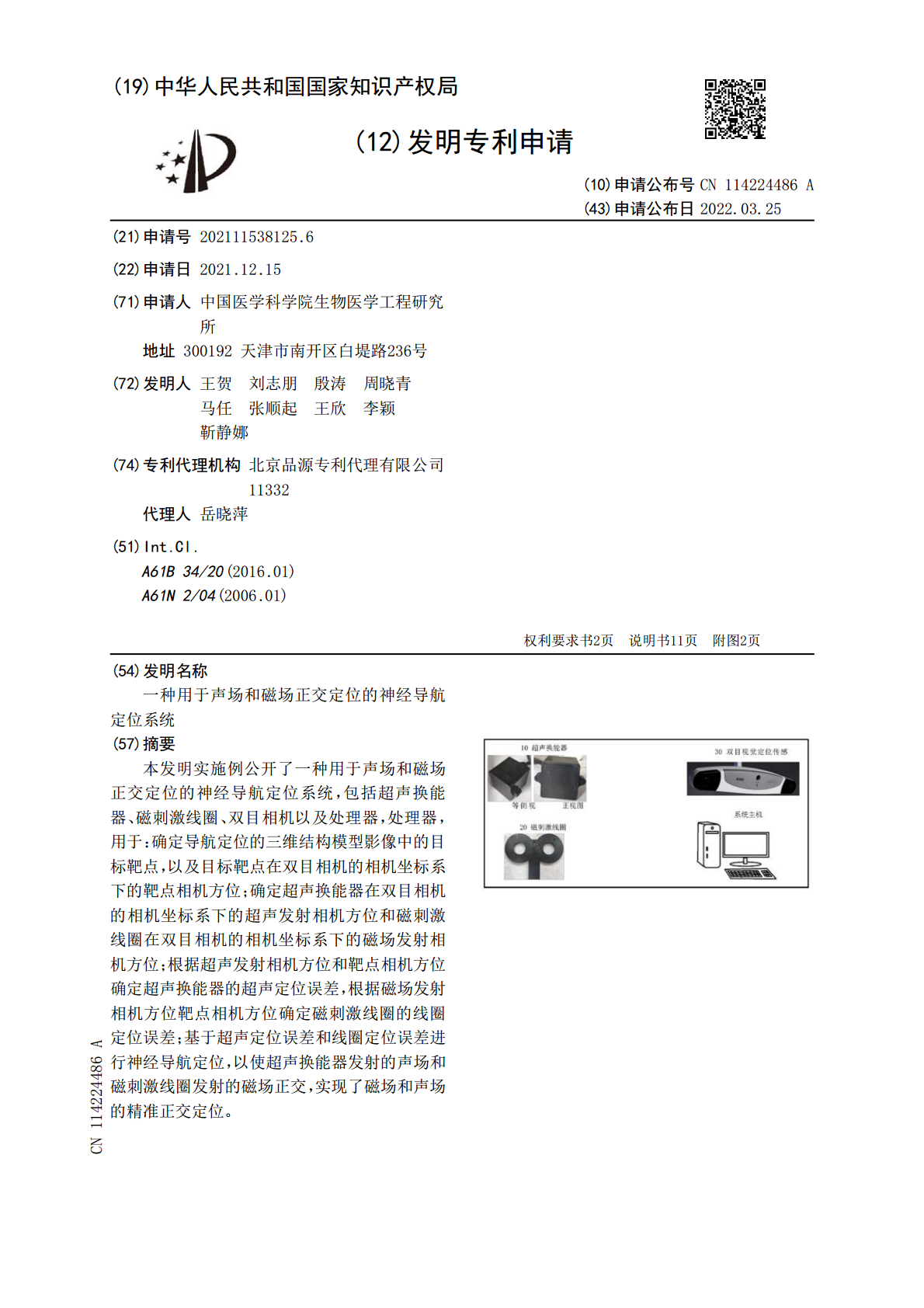
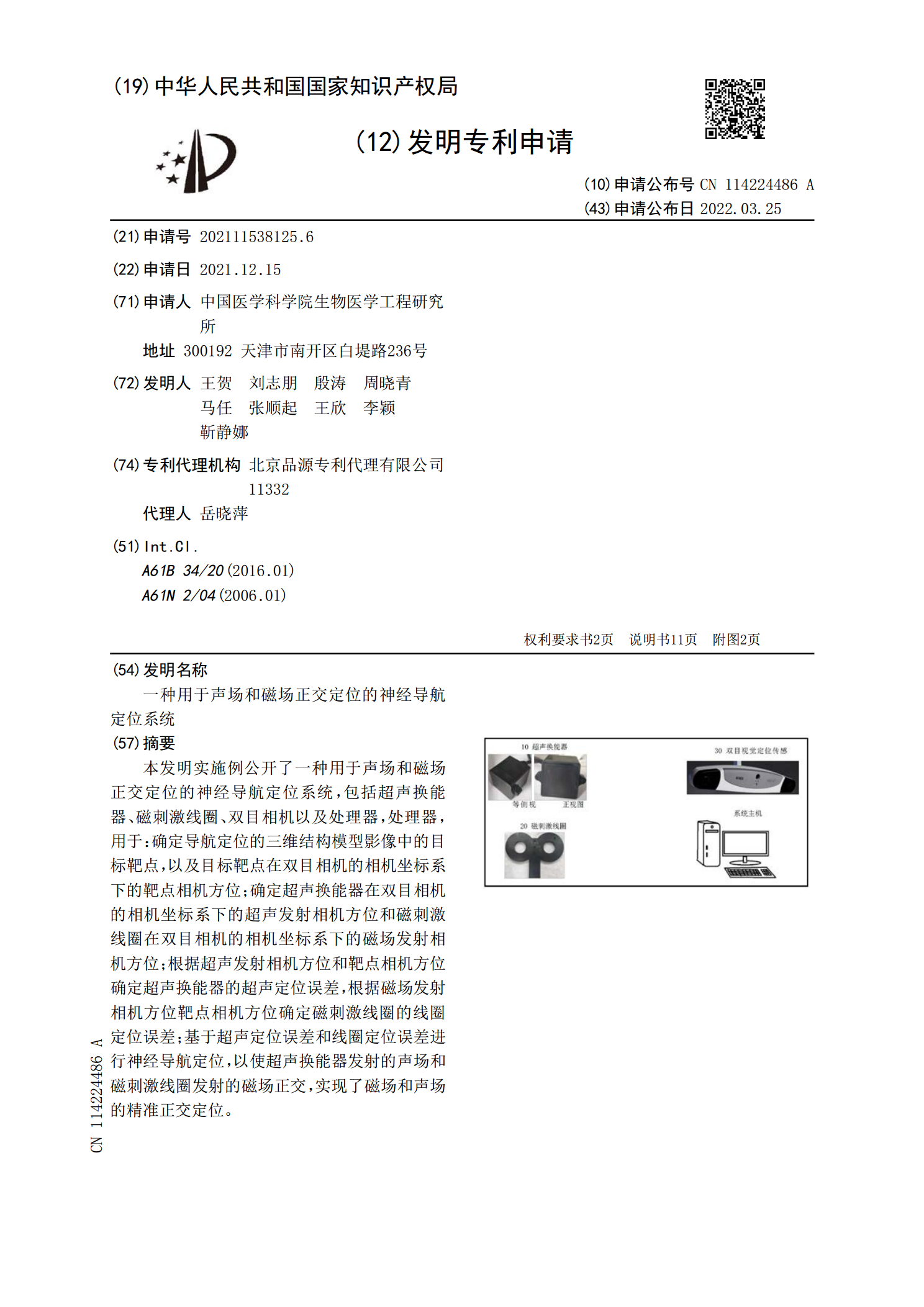
本发明实施例公开了一种用于声场和磁场正交定位的神经导航定位系统,包括超声换能器、磁刺激线圈、双目相机以及处理器,处理器,用于:确定导航定位的三维结构模型影像中的目标靶点,以及目标靶点在双目相机的相机坐标系下的靶点相机方位;确定超声换能器在双目相机的相机坐标系下的超声发射相机方位和磁刺激线圈在双目相机的相机坐标系下的磁场发射相机方位;根据超声发射相机方位和靶点相机方位确定超声换能器的超声定位误差,根据磁场发射相机方位靶点相机方位确定磁刺激线圈的线圈定位误差;基于超声定位误差和线圈定位误差进行神经导航定位,以
一种用于同步双线圈磁刺激的神经导航定位系统.pdf
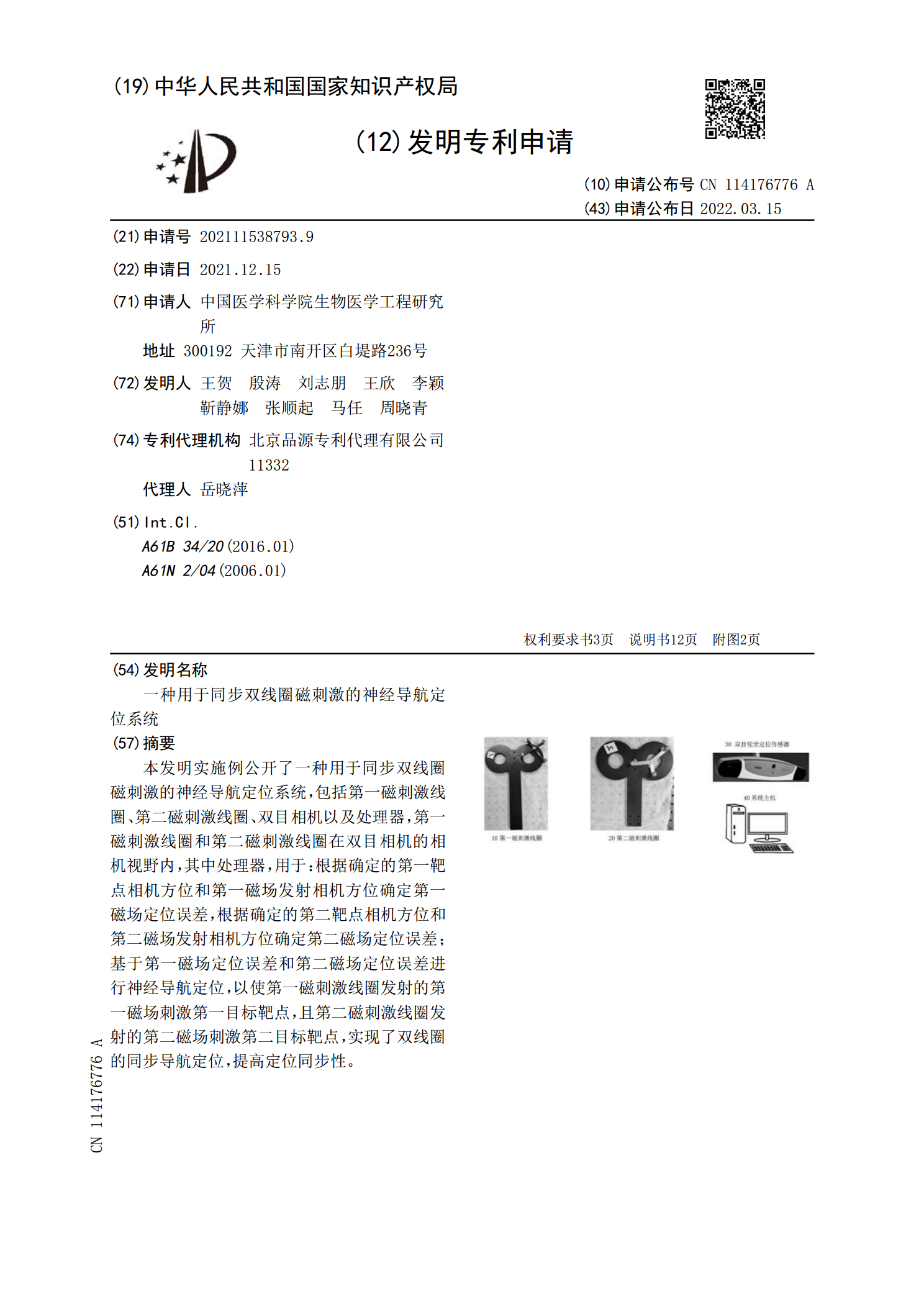
本发明实施例公开了一种用于同步双线圈磁刺激的神经导航定位系统,包括第一磁刺激线圈、第二磁刺激线圈、双目相机以及处理器,第一磁刺激线圈和第二磁刺激线圈在双目相机的相机视野内,其中处理器,用于:根据确定的第一靶点相机方位和第一磁场发射相机方位确定第一磁场定位误差,根据确定的第二靶点相机方位和第二磁场发射相机方位确定第二磁场定位误差;基于第一磁场定位误差和第二磁场定位误差进行神经导航定位,以使第一磁刺激线圈发射的第一磁场刺激第一目标靶点,且第二磁刺激线圈发射的第二磁场刺激第二目标靶点,实现了双线圈的同步导航定位

用于导航和定位信号的分离的正交频分复用.pdf
许多移动设备和移动网络利用正交频分复用(OFDM)来计算移动设备在网络内的定位信息。然而,多普勒效应和其它噪声或障碍物可能导致OFDM信号变得纠缠(尤其是在移动设备正在移动时),这使得所计算出的定位信息不准确。本文描述了用于通过计算用于信号的符号长度来分离OFDM信号的系统和方法,该符号长度比在传统OFDM中使用的最小符号长度要长。选择较长的符号长度减小了在信号上的多普勒效应和其它噪声,从而使得定位计算更加准确。

一种用于农田导航的定位装置及其定位方法.pdf
本发明公开了一种用于农田导航的定位装置,包括底盘、控制组件、激光调整装置、激光发射与接收装置和激光信号反馈装置;所述底盘用于对整个定位装置提供支撑和动力;所述控制组件设置于底盘内,用于对整个定位装置进行导航以及信息交互;所述激光调整装置设置于底盘上方,且与控制组件电连接,用于与控制组件进行信息交互;所述激光发射与接收装置设置于激光调整装置的上方,用于发射或接收激光,并与所述激光调整装置电连接,以通过所述激光调整装置调节上下位移;所述激光信号反馈装置包括若干,且设置于所需导航的农田边界处,用于向激光发射与接
一种用于仿生机器鱼的导航定位方法和系统.pdf
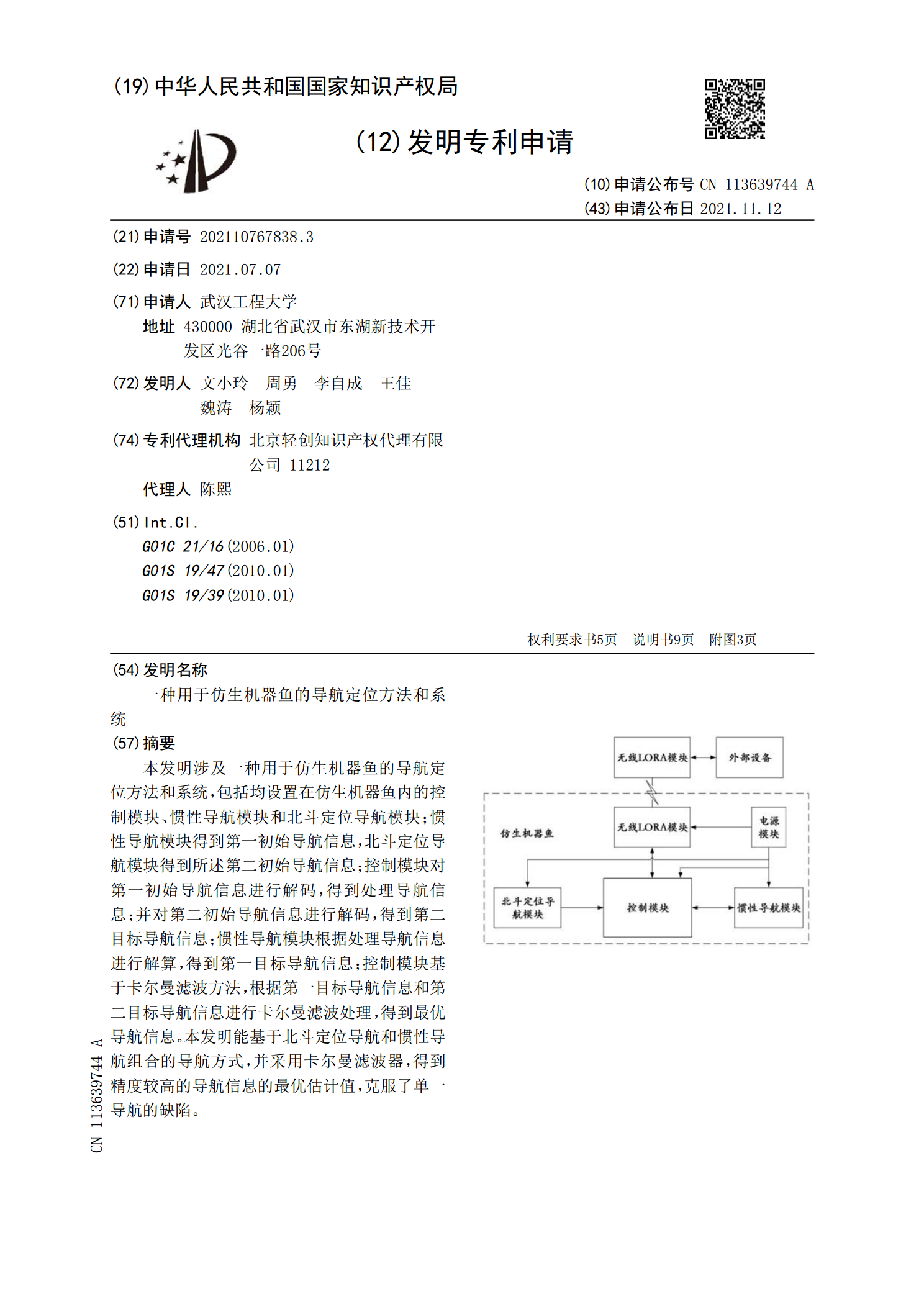
本发明涉及一种用于仿生机器鱼的导航定位方法和系统,包括均设置在仿生机器鱼内的控制模块、惯性导航模块和北斗定位导航模块;惯性导航模块得到第一初始导航信息,北斗定位导航模块得到所述第二初始导航信息;控制模块对第一初始导航信息进行解码,得到处理导航信息;并对第二初始导航信息进行解码,得到第二目标导航信息;惯性导航模块根据处理导航信息进行解算,得到第一目标导航信息;控制模块基于卡尔曼滤波方法,根据第一目标导航信息和第二目标导航信息进行卡尔曼滤波处理,得到最优导航信息。本发明能基于北斗定位导航和惯性导航组合的导航方