
一种用于仿生机器鱼的导航定位方法和系统.pdf

Ch****91


1/10

2/10

3/10
4/10

5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于仿生机器鱼的导航定位方法和系统.pdf
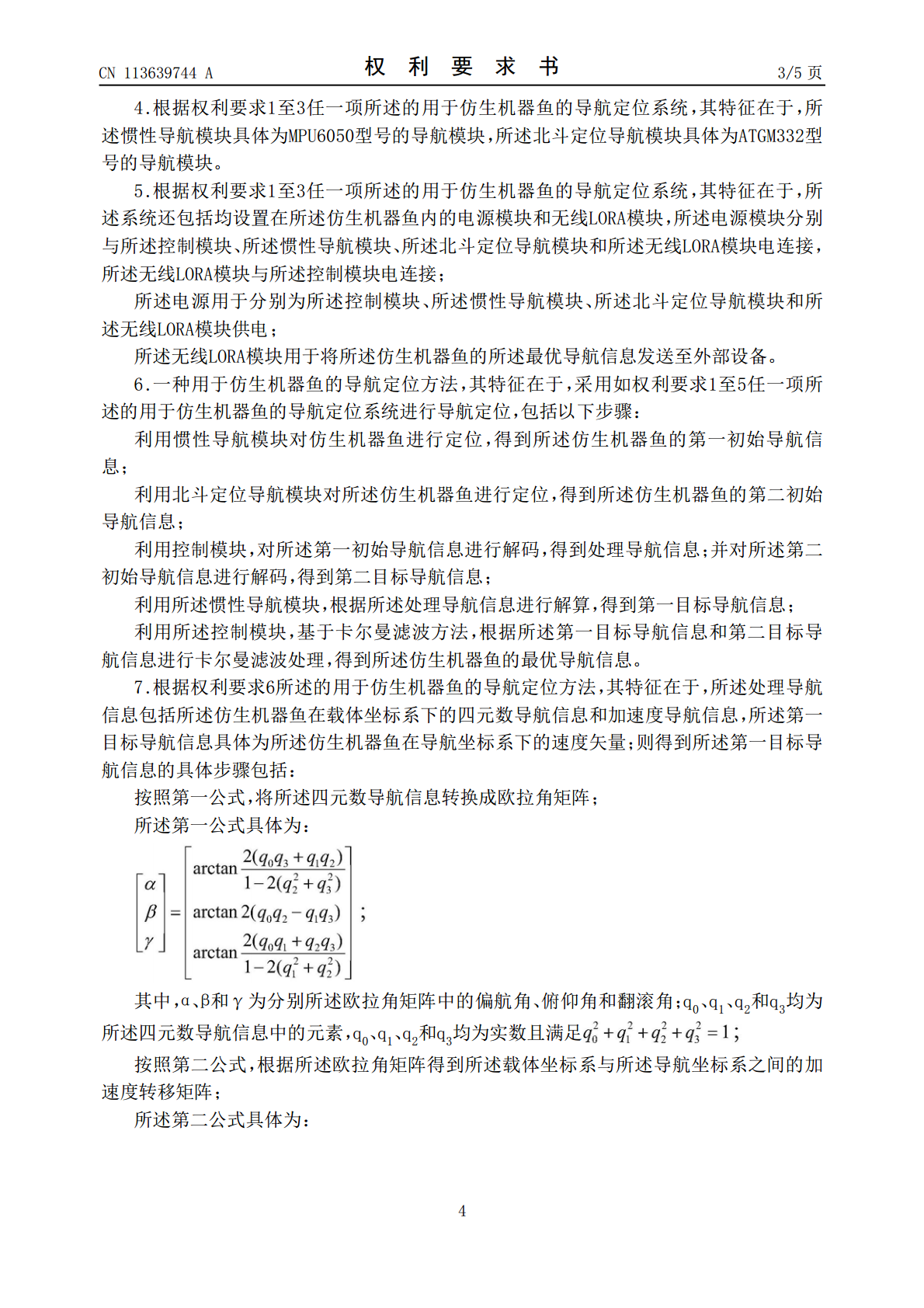
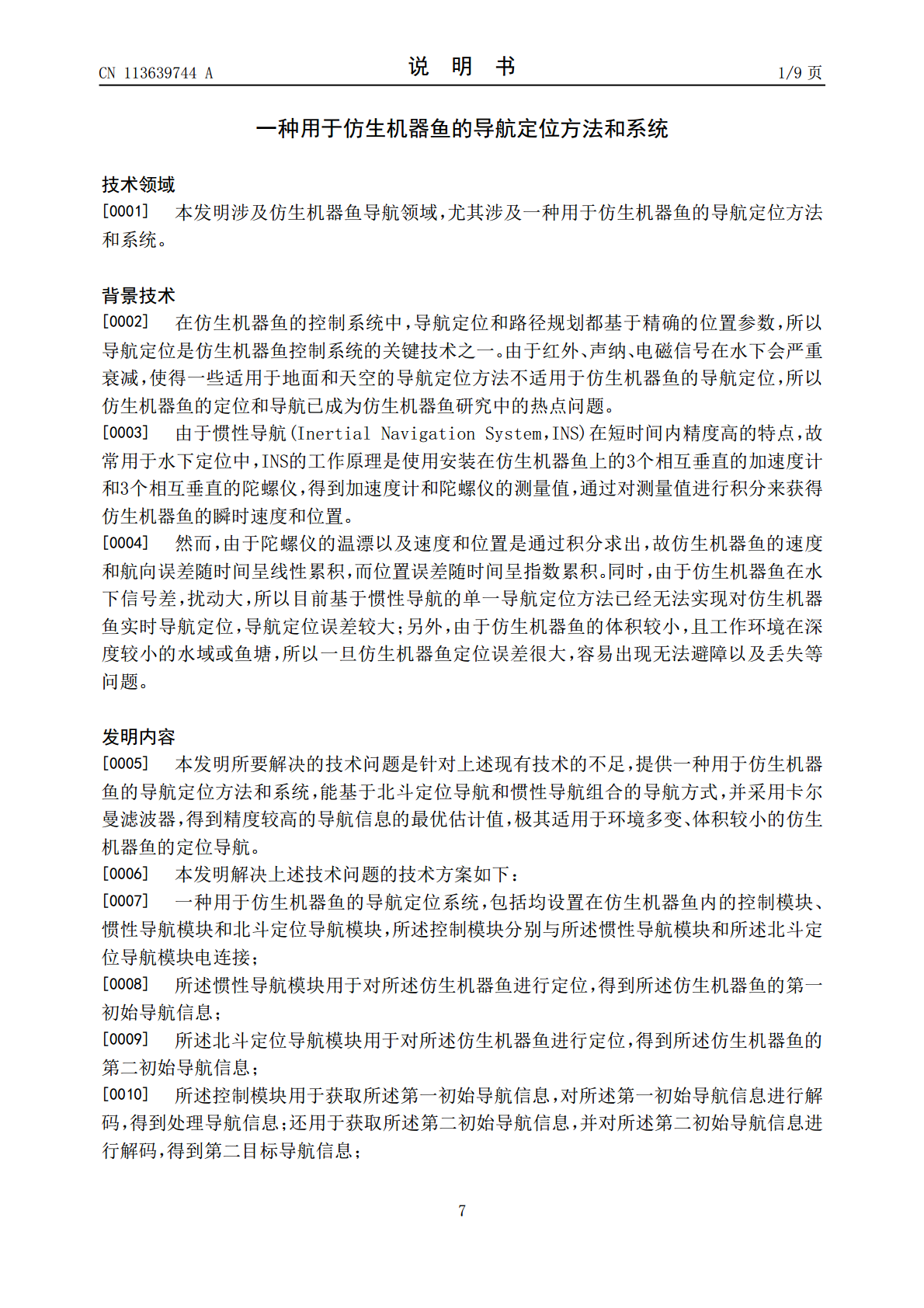
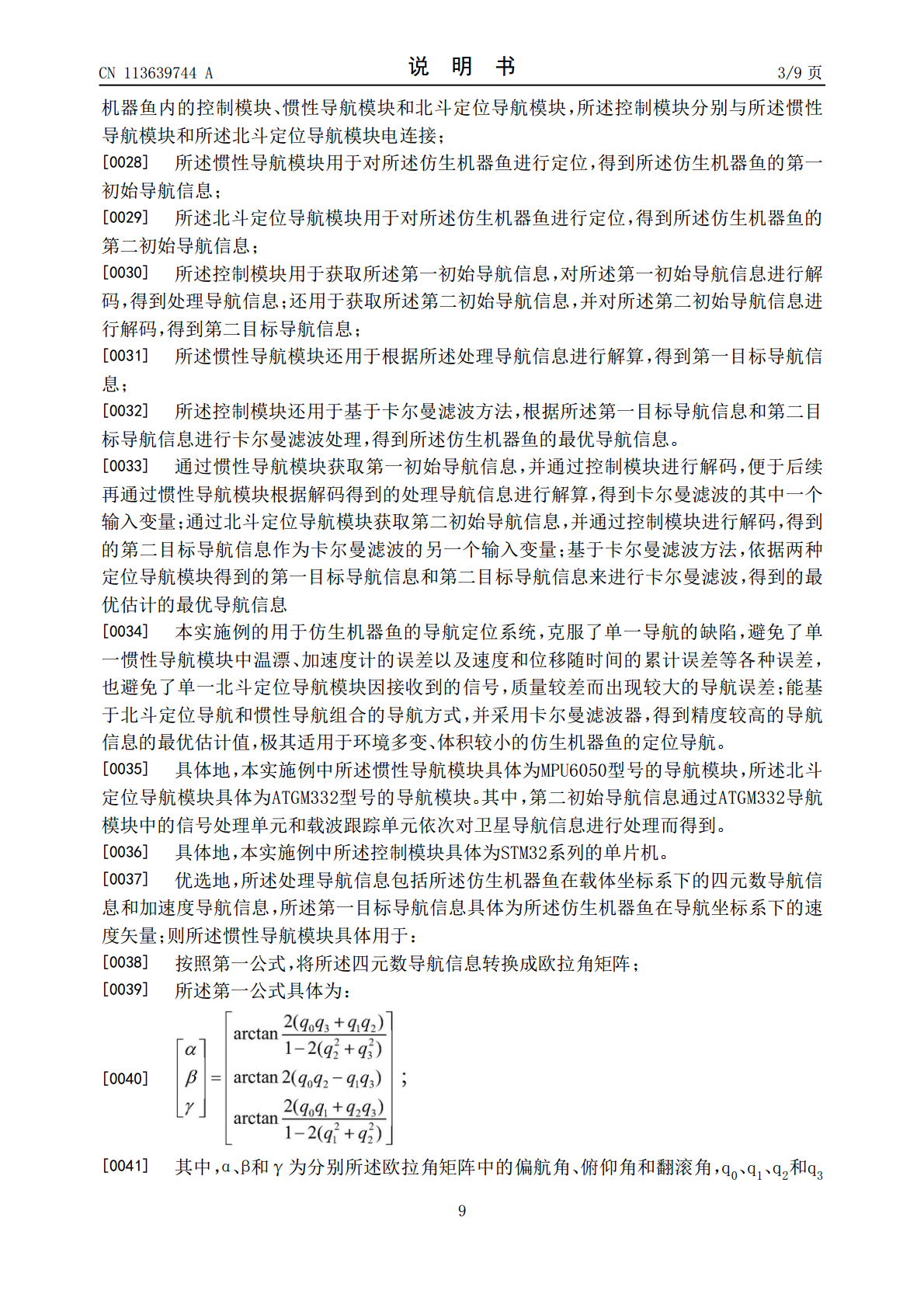
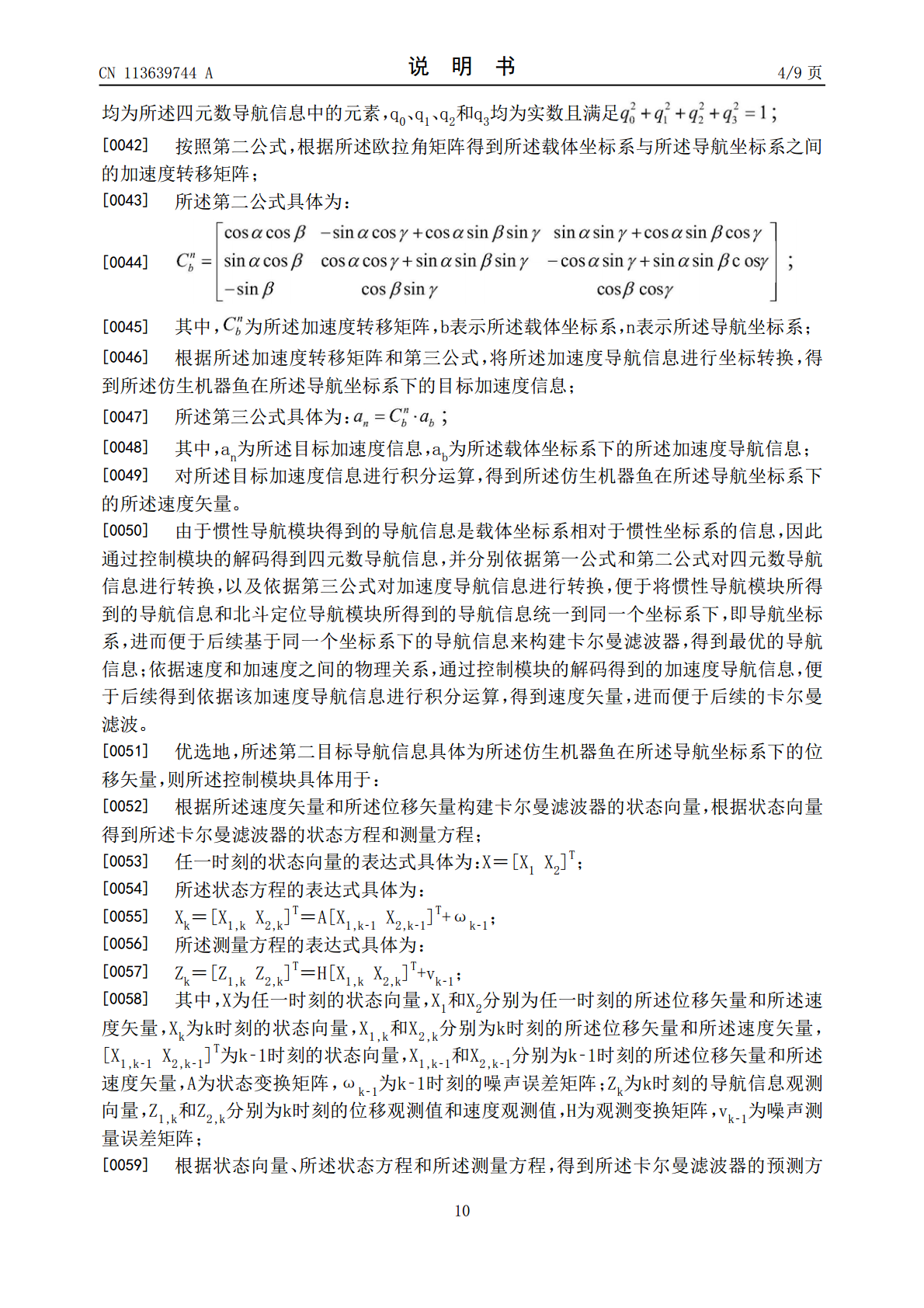
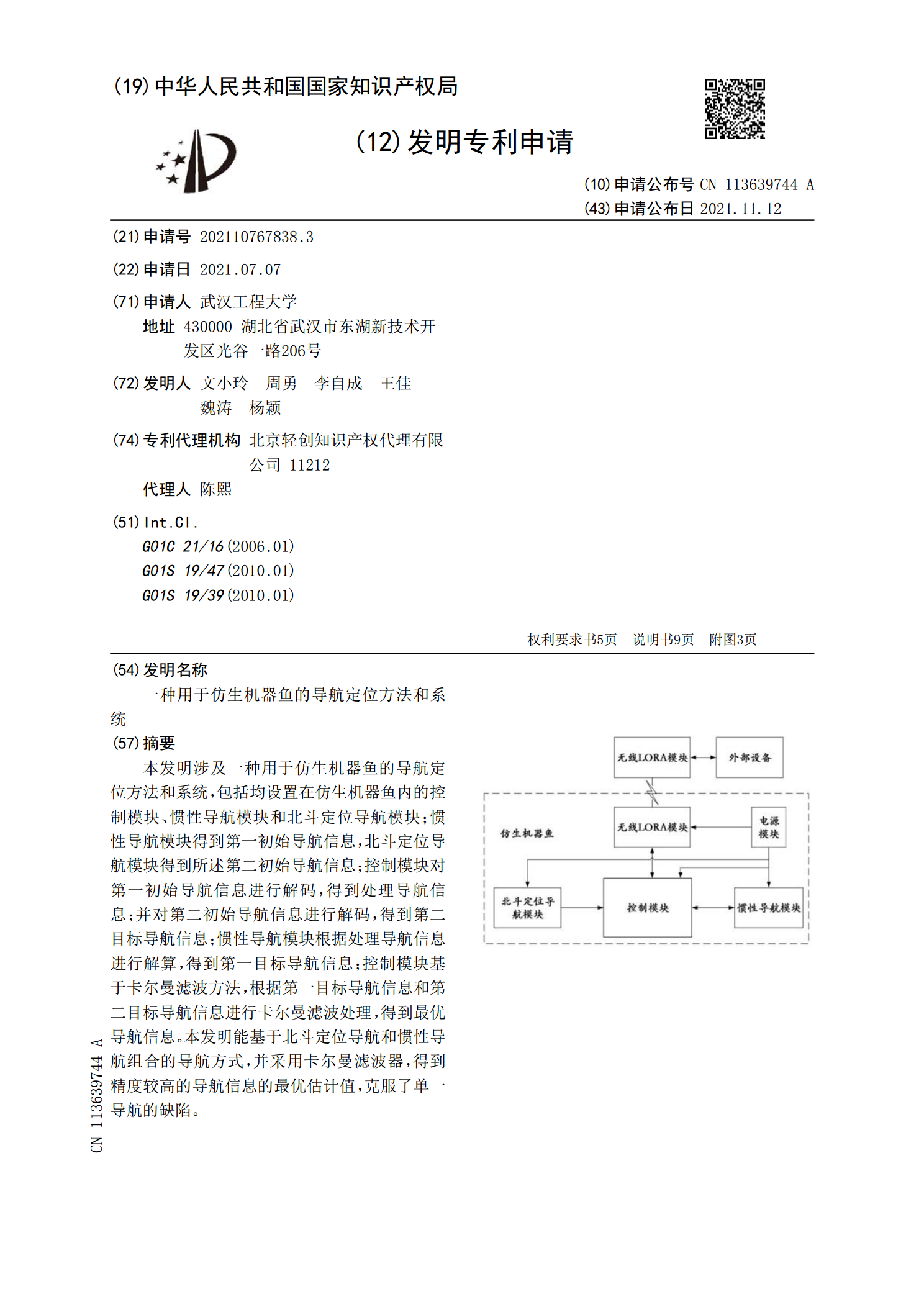
本发明涉及一种用于仿生机器鱼的导航定位方法和系统,包括均设置在仿生机器鱼内的控制模块、惯性导航模块和北斗定位导航模块;惯性导航模块得到第一初始导航信息,北斗定位导航模块得到所述第二初始导航信息;控制模块对第一初始导航信息进行解码,得到处理导航信息;并对第二初始导航信息进行解码,得到第二目标导航信息;惯性导航模块根据处理导航信息进行解算,得到第一目标导航信息;控制模块基于卡尔曼滤波方法,根据第一目标导航信息和第二目标导航信息进行卡尔曼滤波处理,得到最优导航信息。本发明能基于北斗定位导航和惯性导航组合的导航方

一种用于机器人组合的导航定位方法.pdf
本发明公开了一种用于机器人组合的导航定位方法,采用捷联惯性导航装置测量机器人的位置、速度、航向姿态信号并传送给信息融合模块;其将导航系下的位置矢量和航向角与载体系下速度矢量和加速度矢量作为滤波器状态矢量,滤波结果被机器人控制;取GPS接收机输出的水平位置信息,航姿参考系统输出的航向、姿态及载体系下加速度信息与载体系下多普勒测速声纳的速度信息,通过强跟踪无迹卡尔曼滤波器实现机器人的自主校正与数据滤波;信息融合模块将捷联惯性导航装置、无迹卡尔曼滤波器的信息进行融合,输出航行器导航信息,并校正捷联惯性导航装置;

基于卫星INS的仿生机器鱼组合导航系统.pptx
汇报人:CONTENTS添加章节标题仿生机器鱼导航系统概述仿生机器鱼导航系统的定义仿生机器鱼导航系统的应用场景仿生机器鱼导航系统的研究现状基于卫星INS的仿生机器鱼组合导航系统原理INS/GPS组合导航系统原理INS/GPS组合导航系统优势INS/GPS组合导航系统在仿生机器鱼中的应用仿生机器鱼组合导航系统硬件设计INS/GPS组合导航模块设计传感器模块设计控制模块设计电源模块设计仿生机器鱼组合导航系统软件设计INS/GPS组合导航算法设计传感器数据处理算法设计控制算法设计通信协议设计仿生机器鱼组合导航系

基于仿生机器鱼的仿生波动控制方法及系统.pdf
本发明提供一种基于仿生机器鱼的仿生波动控制方法及系统,该方法包括:基于仿生机器鱼的鱼体波函数,确定所述仿生机器鱼在当前时刻的期望鱼尾摆角;基于预设映射表和所述期望鱼尾摆角,确定所述仿生机器鱼内的舵机在所述当前时刻的目标舵机转角;所述舵机用于驱动所述仿生机器鱼的鱼尾摆动;基于所述目标舵机转角,对所述仿生机器鱼在所述当前时刻的仿生波动状态进行控制;其中,所述预设映射表用于表征所述仿生机器鱼的鱼尾摆角与舵机转角之间的对应关系,该方法完全基于数据驱动,不需要求解复杂机构的运动学模型,解决了存在控制耦合的机构的控制
用于定位医疗机器人的导航方法.pdf
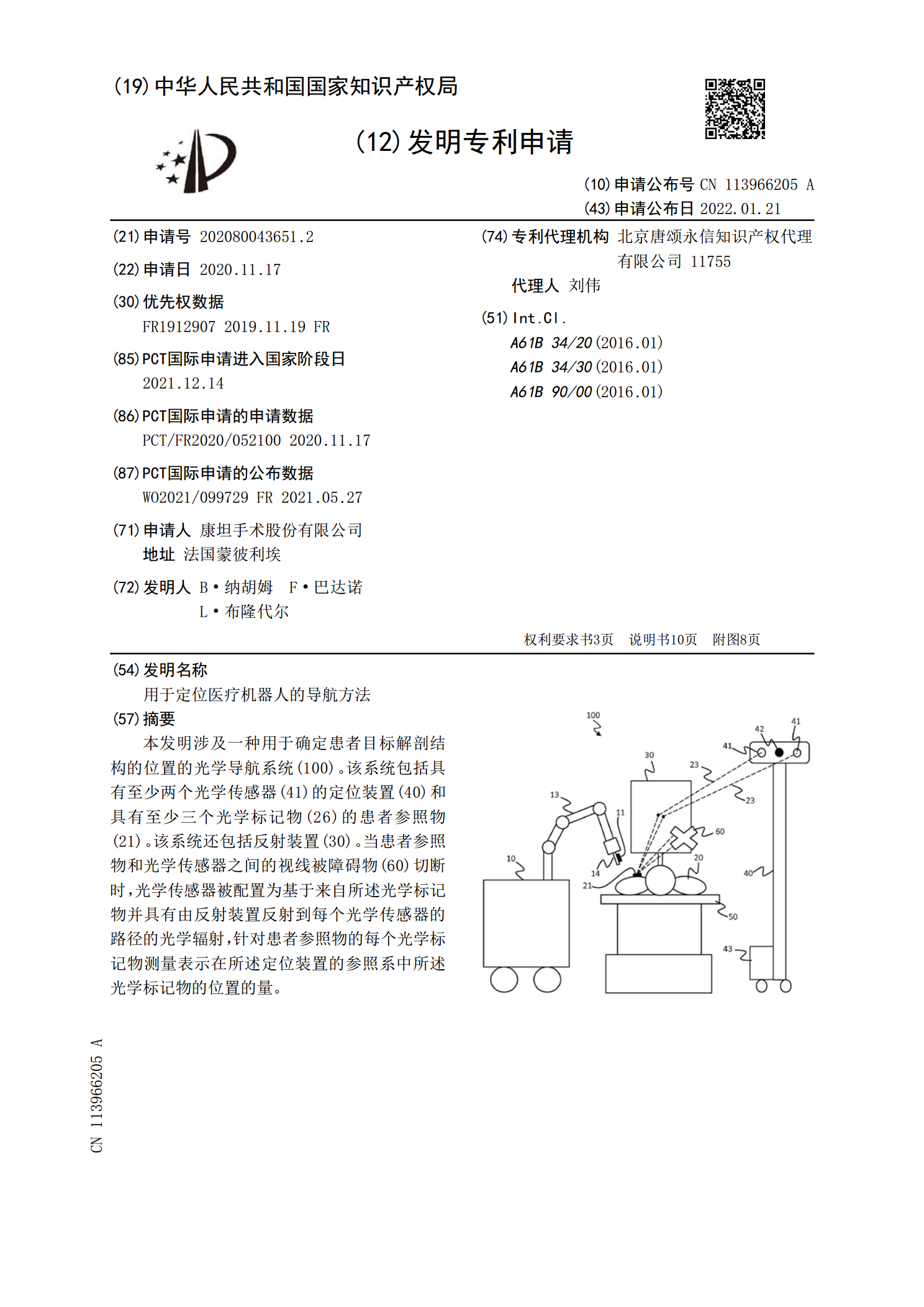
本发明涉及一种用于确定患者目标解剖结构的位置的光学导航系统(100)。该系统包括具有至少两个光学传感器(41)的定位装置(40)和具有至少三个光学标记物(26)的患者参照物(21)。该系统还包括反射装置(30)。当患者参照物和光学传感器之间的视线被障碍物(60)切断时,光学传感器被配置为基于来自所述光学标记物并具有由反射装置反射到每个光学传感器的路径的光学辐射,针对患者参照物的每个光学标记物测量表示在所述定位装置的参照系中所述光学标记物的位置的量。