
一种车辆转向模式的切换方法及装置.pdf

是你****优呀


1/10
2/10

3/10

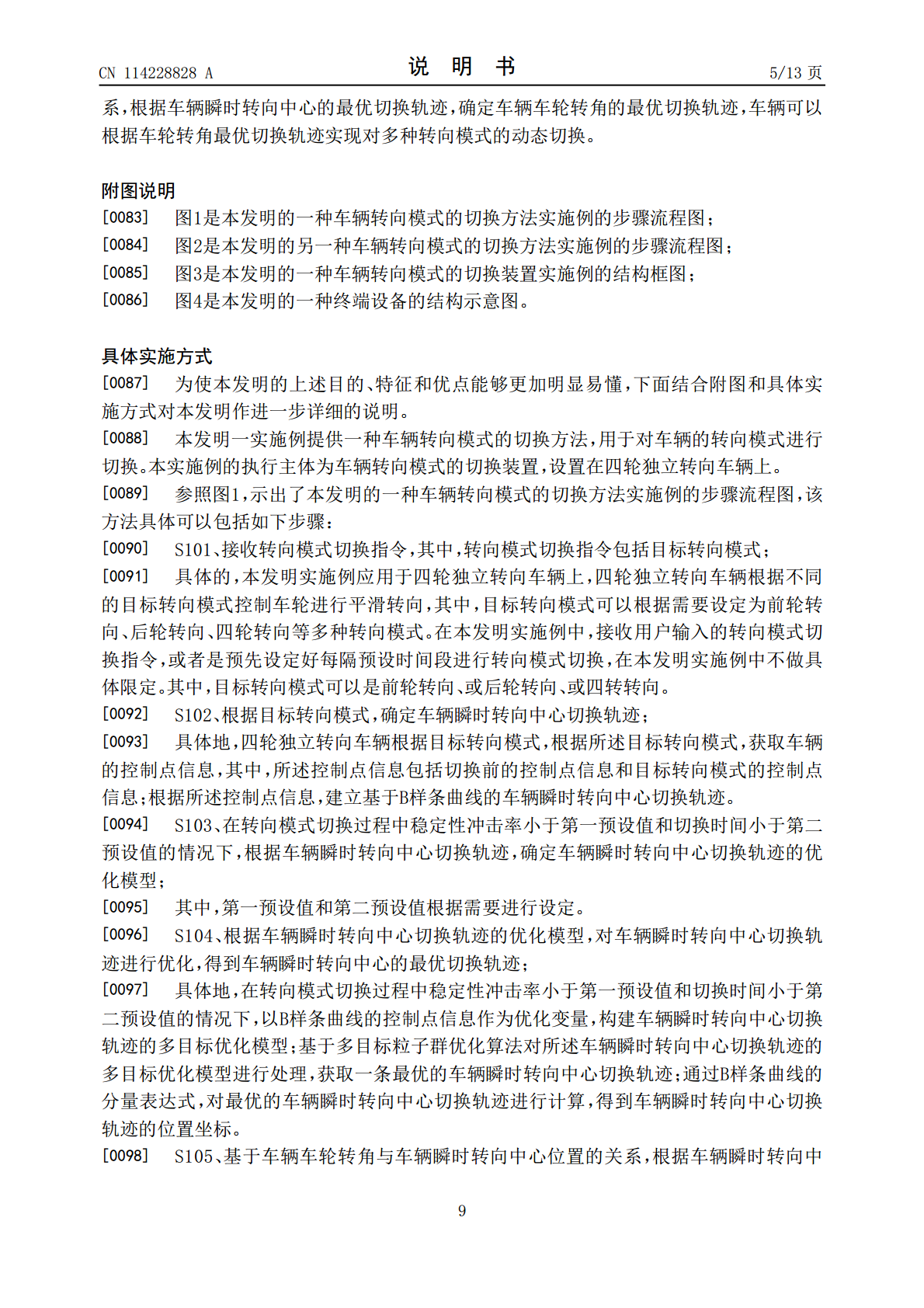
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种车辆转向模式的切换方法及装置.pdf
本发明实施例提供了一种车辆转向模式的切换方法及装置,包括:接收转向模式切换指令,根据目标转向模式,确定车辆瞬时转向中心的切换轨迹;在转向模式切换过程中稳定性冲击率小于第一预设值和切换时间小于第二预设值的情况下,根据车辆瞬时转向中心切换轨迹,确定车辆瞬时转向中心切换轨迹的优化模型;根据车辆瞬时转向中心切换轨迹的优化模型,对车辆瞬时转向中心切换轨迹进行优化,得到车辆瞬时转向中心的最优切换轨迹;基于车辆车轮转角与车辆瞬时转向中心位置的关系,根据车辆瞬时转向中心的最优切换轨迹,确定车辆车轮转角的最优切换轨迹,车辆

车辆线控转向模式切换限位装置.pdf
本发明公开了一种车辆线控转向模式切换限位装置,旨在实现方向盘在任意位置时转向模式切换和准确限位。直线导轨固定安装在箱体上,滑块滑动联接在直线导轨上,不完全齿条和滑块分别固定联接在行程挡板的两侧,行程挡板的下侧设置有长凹槽,长凹槽内设置有短凹槽,不完全齿轮固定联接在主动齿轮轴上,与不完全齿条啮合,挡块支撑座固定联接在箱体的底板上,限位挡块动配合安装在挡块支撑座上端的滑道内,弹簧安装在挡块支撑座的滑道内,从动架固定联接在限位挡块的下端,电机固定联接在挡块支撑座上,凸轮固定联接在电机的输出轴上,凸轮的外轮廓与从

车辆驾驶模式切换方法、装置及车辆.pdf
本申请提供了一种车辆驾驶模式切换方法、装置及车辆,涉及车辆技术领域,具体涉及车辆控制技术领域。具体实现方案为:获取车辆的加速踏板的第一踩踏信号和第二踩踏信号,第一踩踏信号和第二踩踏信号间隔生成,并且在第一踩踏信号和第二踩踏信号之间存在回撤信号;在检测到满足第一切换条件的情况下,发送切换信号,切换信号使得车辆从第一模式切换至第二模式;第一切换条件包括:第一踩踏信号的第一目标信号值和第二踩踏信号的第二目标信号值均表征加速踏板被踩踏至开度大于或等于第一阈值的位置。

一种车辆转向模式的切换系统.pdf
本发明公开了一种车辆转向模式的切换系统。通过第一联动杆将第一阀门、第二阀门、第三阀门串成一组联动操作,通过第二联动杆将第四阀门、第五阀门、第六阀门串成一组联动操作,并将油口分别连接到前轮转向油缸和后轮转向油缸。操作第一联动杆及第二联动杆可以实现各阀门的通断状态的切换,以实现前后轮转向油缸的不同动作,从而实现多种转向模式之间的切换。本发明无电气元件、成本低、可靠性高、部件少、操作简单直观、结构紧凑、集成度高。
一种驾驶模式切换装置、车辆、切换方法及终端.pdf
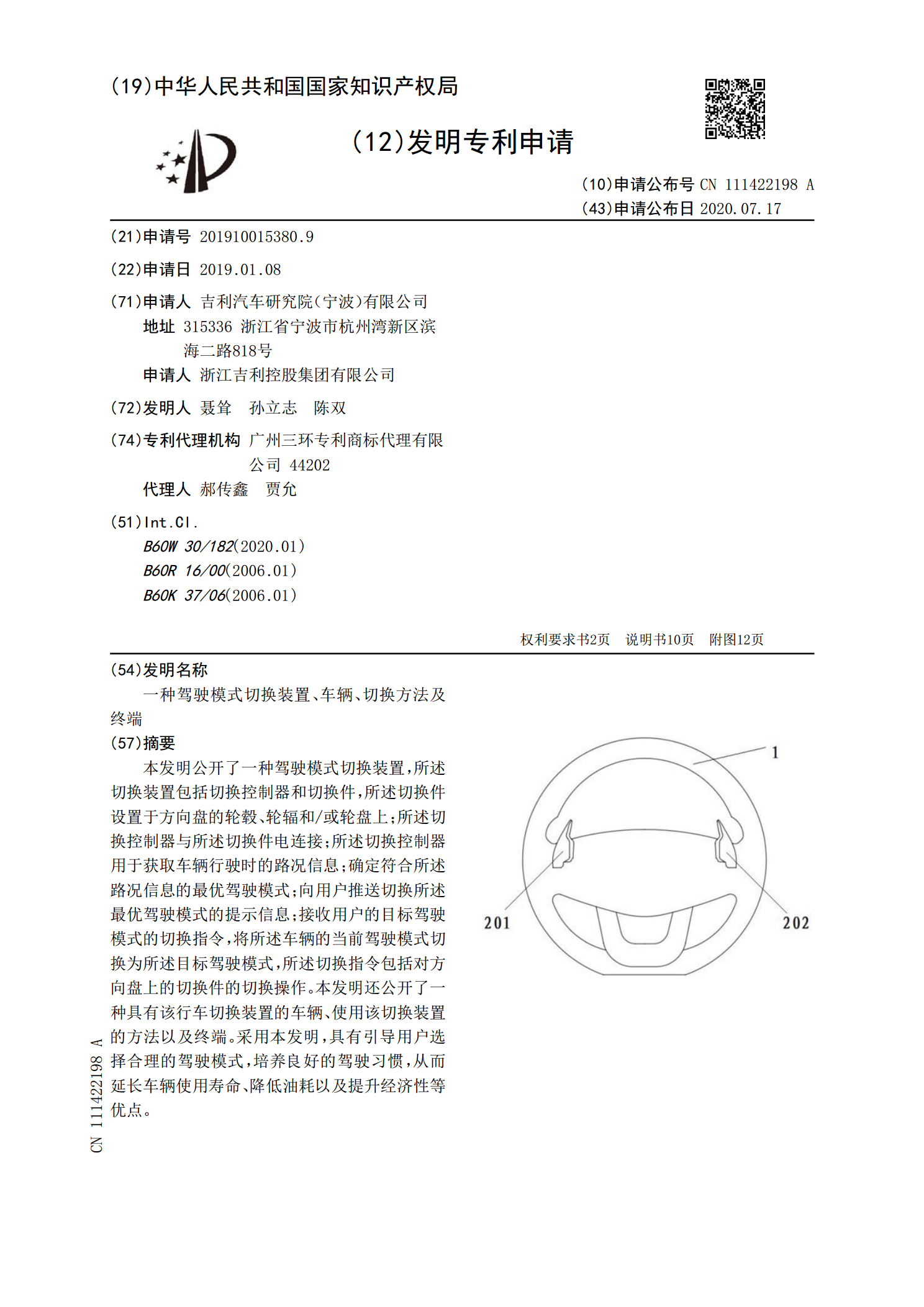
本发明公开了一种驾驶模式切换装置,所述切换装置包括切换控制器和切换件,所述切换件设置于方向盘的轮毂、轮辐和/或轮盘上;所述切换控制器与所述切换件电连接;所述切换控制器用于获取车辆行驶时的路况信息;确定符合所述路况信息的最优驾驶模式;向用户推送切换所述最优驾驶模式的提示信息;接收用户的目标驾驶模式的切换指令,将所述车辆的当前驾驶模式切换为所述目标驾驶模式,所述切换指令包括对方向盘上的切换件的切换操作。本发明还公开了一种具有该行车切换装置的车辆、使用该切换装置的方法以及终端。采用本发明,具有引导用户选择合理的