
车辆定位方法、装置和电子设备.pdf

和裕****az

1/10
2/10
3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

车辆定位方法、装置和电子设备.pdf
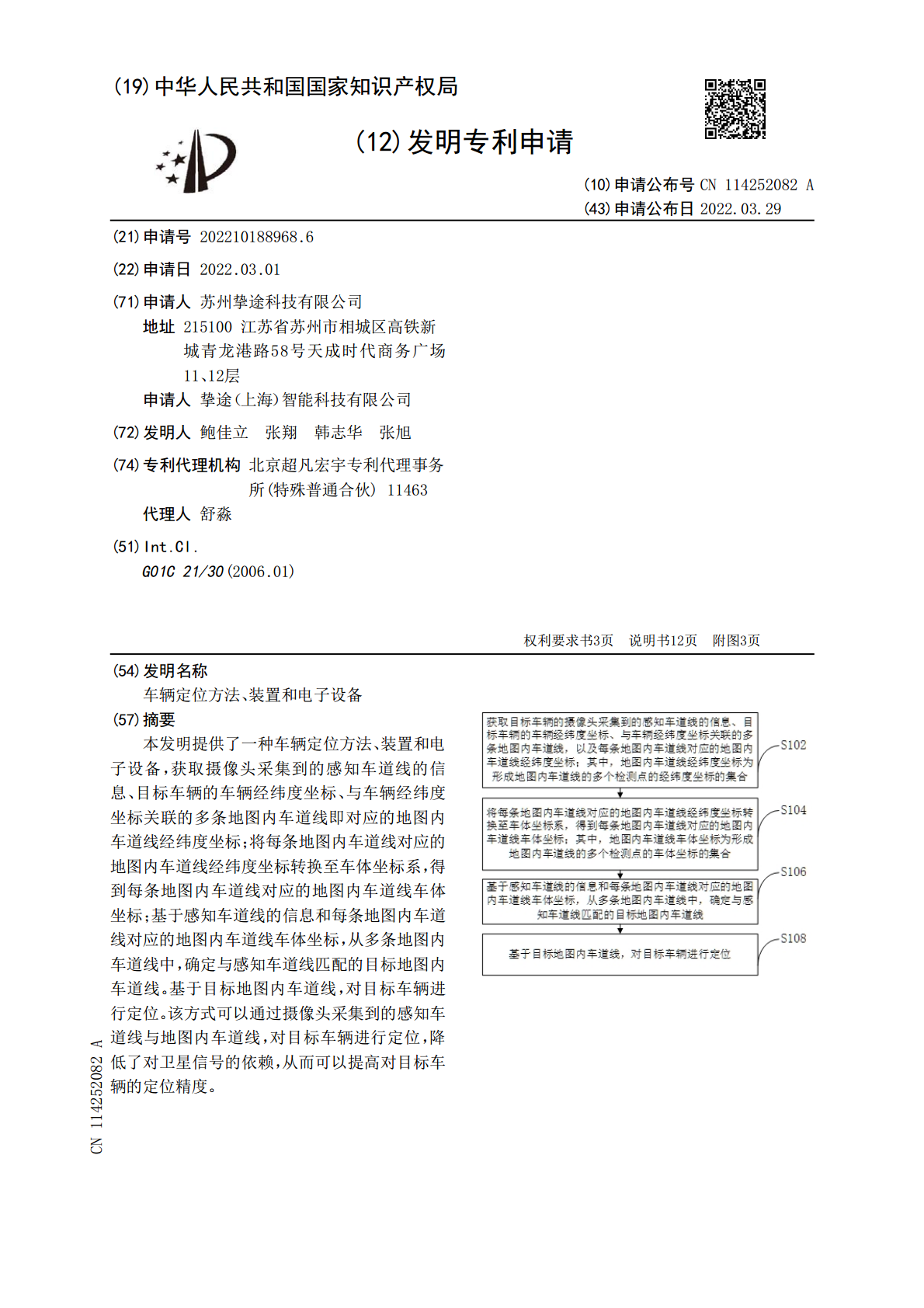
本发明提供了一种车辆定位方法、装置和电子设备,获取摄像头采集到的感知车道线的信息、目标车辆的车辆经纬度坐标、与车辆经纬度坐标关联的多条地图内车道线即对应的地图内车道线经纬度坐标;将每条地图内车道线对应的地图内车道线经纬度坐标转换至车体坐标系,得到每条地图内车道线对应的地图内车道线车体坐标;基于感知车道线的信息和每条地图内车道线对应的地图内车道线车体坐标,从多条地图内车道线中,确定与感知车道线匹配的目标地图内车道线。基于目标地图内车道线,对目标车辆进行定位。该方式可以通过摄像头采集到的感知车道线与地图内车道

车辆的地图定位方法、装置和电子设备.pdf
本发明提供了一种车辆的地图定位方法、装置和电子设备。其中,该方法包括:获取地图数据和车辆的定位数据;基于车辆上电时刻的定位数据确定车辆的初始坐标系;基于车辆当前时刻的定位数据调整初始坐标系,得到投影坐标系;基于车辆当前时刻的定位数据确定车辆在投影坐标系下的投影坐标;将地图数据包括的地图信息投影在投影坐标系中。该方式中,通过调整初始坐标系,可以最大限度保留车辆运行过程中平面运动信息量,减少地图和车辆的投影误差,提高车辆地图定位的实时准确性,从而提供准确的二维平面的地图定位信息。
车辆定位方法和装置、存储介质及电子设备.pdf
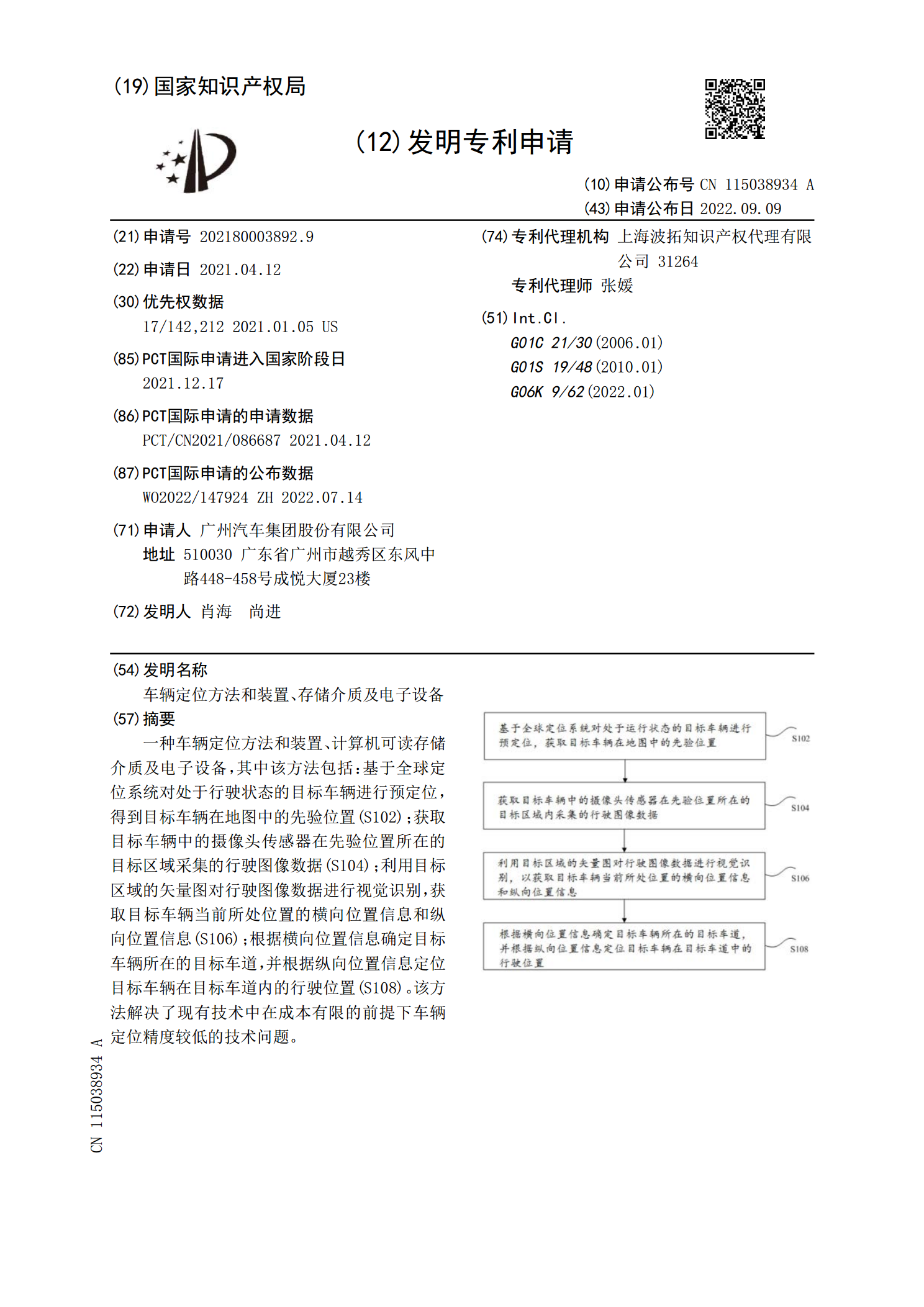
一种车辆定位方法和装置、计算机可读存储介质及电子设备,其中该方法包括:基于全球定位系统对处于行驶状态的目标车辆进行预定位,得到目标车辆在地图中的先验位置(S102);获取目标车辆中的摄像头传感器在先验位置所在的目标区域采集的行驶图像数据(S104);利用目标区域的矢量图对行驶图像数据进行视觉识别,获取目标车辆当前所处位置的横向位置信息和纵向位置信息(S106);根据横向位置信息确定目标车辆所在的目标车道,并根据纵向位置信息定位目标车辆在目标车道内的行驶位置(S108)。该方法解决了现有技术中在成本有限的前
车辆定位方法和装置、存储介质及电子设备.pdf
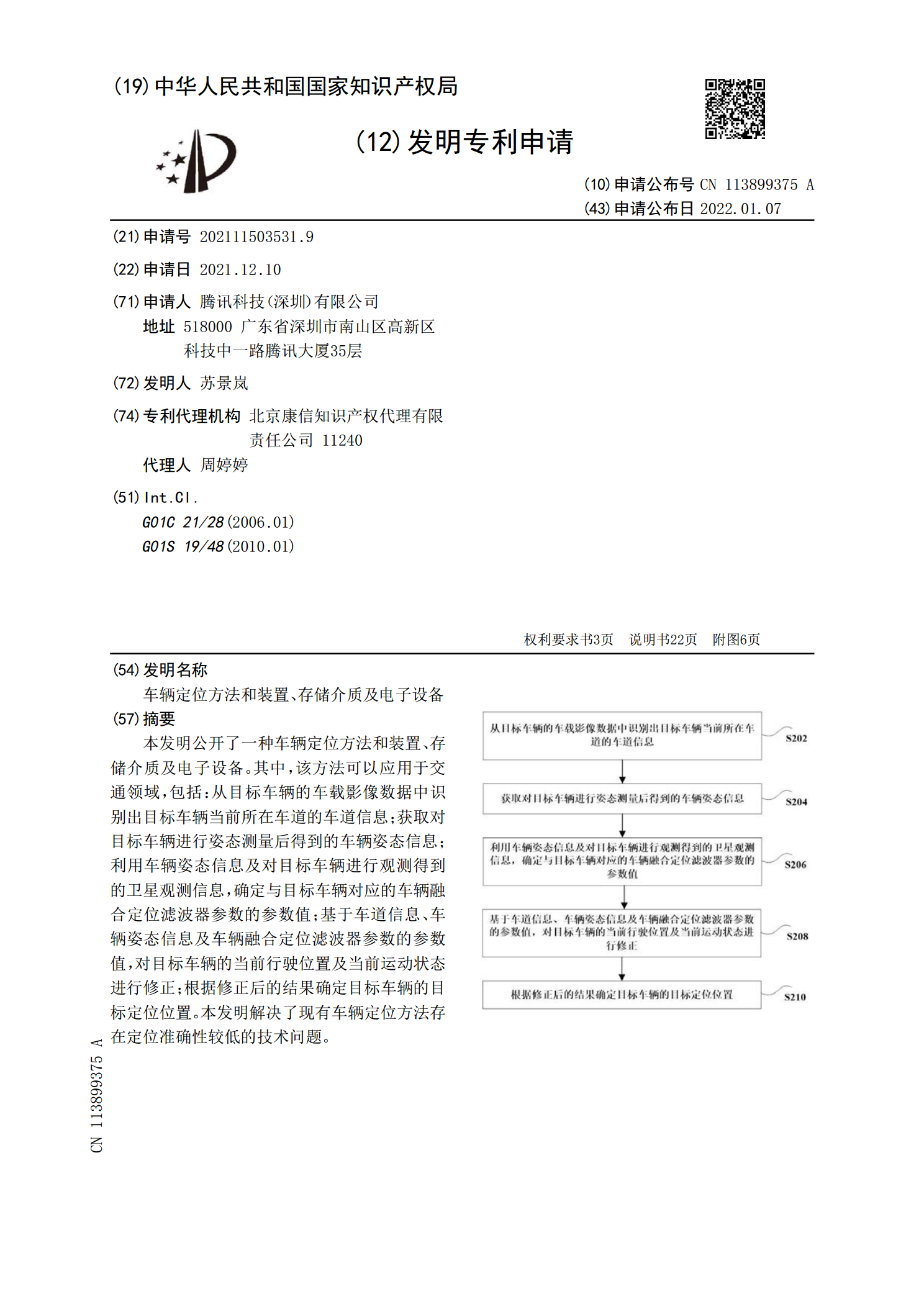
本发明公开了一种车辆定位方法和装置、存储介质及电子设备。其中,该方法可以应用于交通领域,包括:从目标车辆的车载影像数据中识别出目标车辆当前所在车道的车道信息;获取对目标车辆进行姿态测量后得到的车辆姿态信息;利用车辆姿态信息及对目标车辆进行观测得到的卫星观测信息,确定与目标车辆对应的车辆融合定位滤波器参数的参数值;基于车道信息、车辆姿态信息及车辆融合定位滤波器参数的参数值,对目标车辆的当前行驶位置及当前运动状态进行修正;根据修正后的结果确定目标车辆的目标定位位置。本发明解决了现有车辆定位方法存在定位准确性较

车辆测速、定位方法和装置以及电子设备.pdf
本发明实施例提供了一种车辆测速、定位方法和装置以及电子设备。该车辆测速方法包括:持续获取车辆在垂直方向上的加速度;根据所述车辆在垂直方向上的加速度,识别所述车辆前轮经过障碍物的震动时间点和后轮经过所述障碍物的震动时间点;计算所述车辆前轮经过所述障碍物的震动时间点和后轮经过所述障碍物的震动时间点之间的时间长度;获取车辆轴距,用所述车辆轴距除以所述时间长度,得到所述车辆的第一行驶速度。本发明实施例利用导航设备的惯性传感器,获取车辆在垂直方向上的加速度的变化情况,对车辆经过障碍物产生的震动信息进行检测,通过车辆