
一种单目旋转结构光三维测量系统标定方法.pdf

元枫****文章

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种单目旋转结构光三维测量系统标定方法.pdf
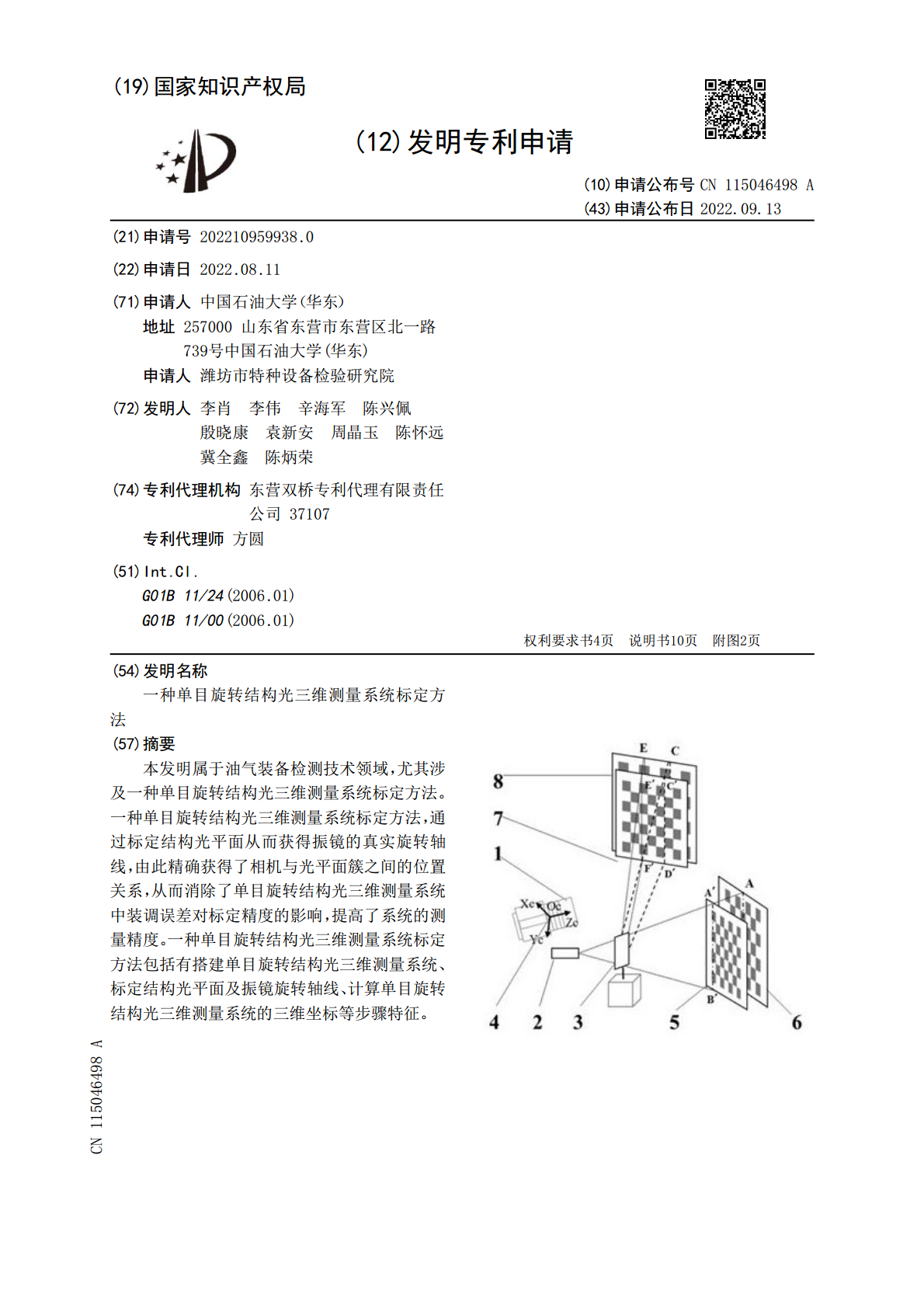
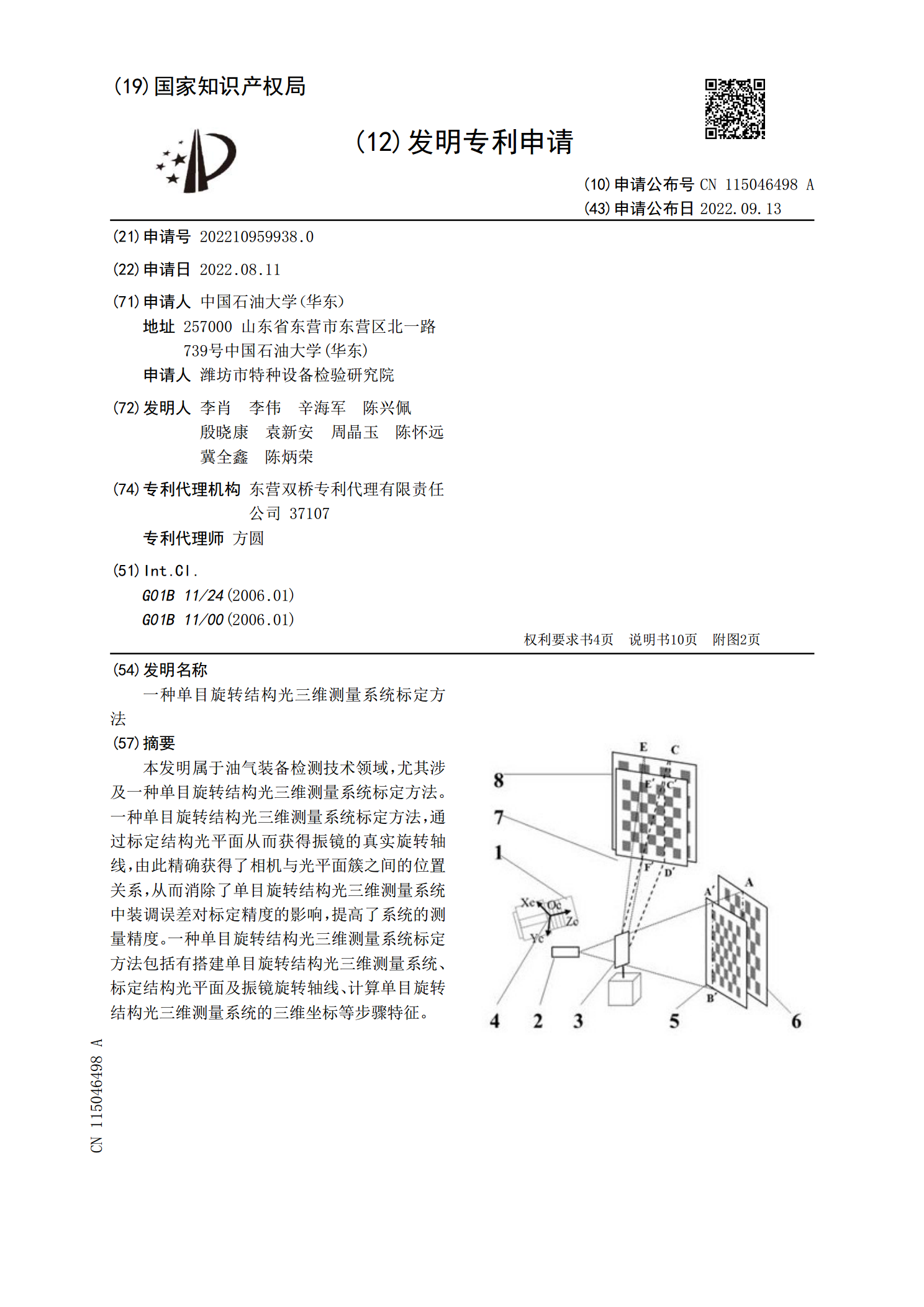
本发明属于油气装备检测技术领域,尤其涉及一种单目旋转结构光三维测量系统标定方法。一种单目旋转结构光三维测量系统标定方法,通过标定结构光平面从而获得振镜的真实旋转轴线,由此精确获得了相机与光平面簇之间的位置关系,从而消除了单目旋转结构光三维测量系统中装调误差对标定精度的影响,提高了系统的测量精度。一种单目旋转结构光三维测量系统标定方法包括有搭建单目旋转结构光三维测量系统、标定结构光平面及振镜旋转轴线、计算单目旋转结构光三维测量系统的三维坐标等步骤特征。
一种单目旋转结构光三维测量方法.pdf
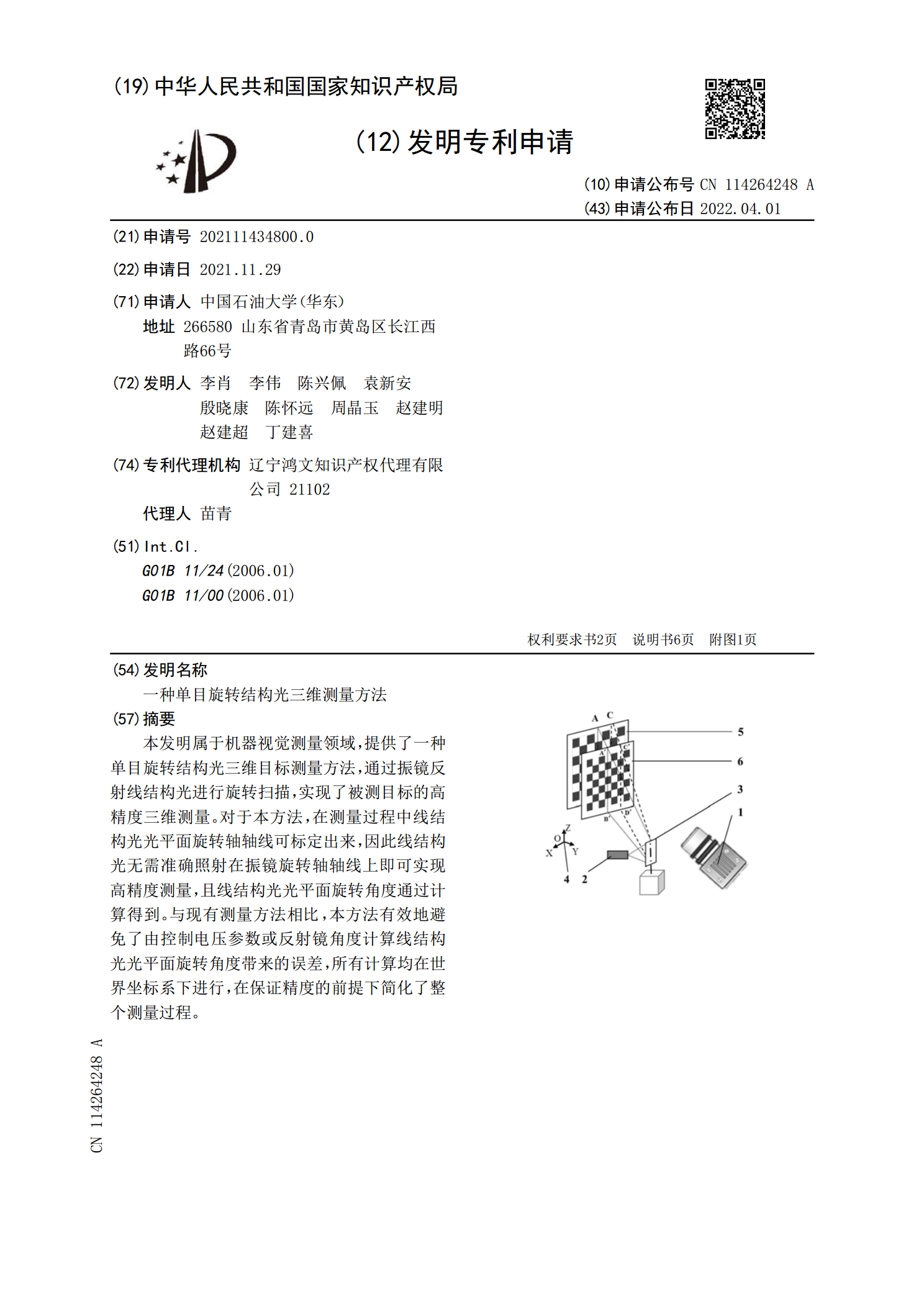
本发明属于机器视觉测量领域,提供了一种单目旋转结构光三维目标测量方法,通过振镜反射线结构光进行旋转扫描,实现了被测目标的高精度三维测量。对于本方法,在测量过程中线结构光光平面旋转轴轴线可标定出来,因此线结构光无需准确照射在振镜旋转轴轴线上即可实现高精度测量,且线结构光光平面旋转角度通过计算得到。与现有测量方法相比,本方法有效地避免了由控制电压参数或反射镜角度计算线结构光光平面旋转角度带来的误差,所有计算均在世界坐标系下进行,在保证精度的前提下简化了整个测量过程。
一种单目三维高速测量方法、光路系统及其标定方法.pdf
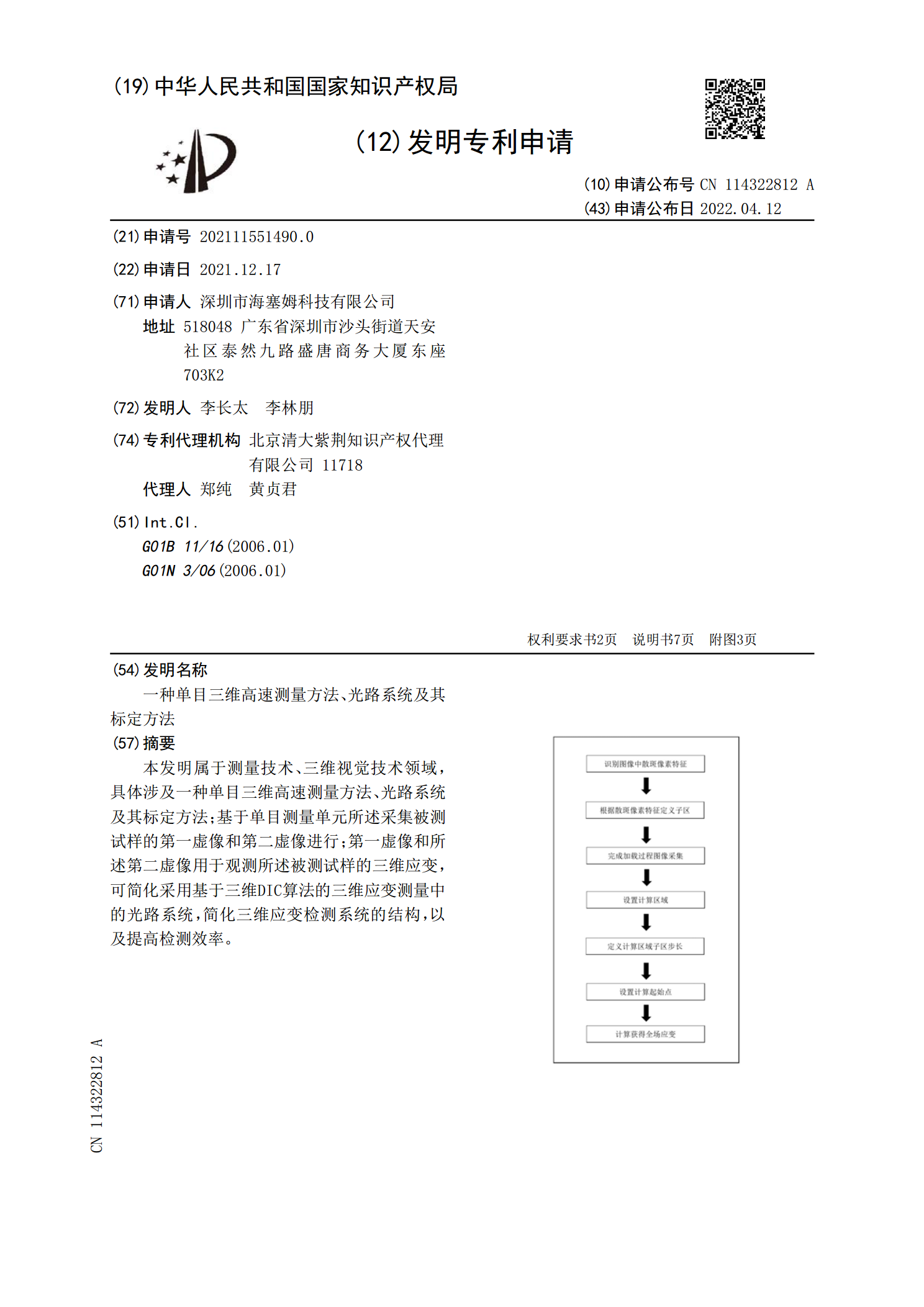
本发明属于测量技术、三维视觉技术领域,具体涉及一种单目三维高速测量方法、光路系统及其标定方法;基于单目测量单元所述采集被测试样的第一虚像和第二虚像进行;第一虚像和所述第二虚像用于观测所述被测试样的三维应变,可简化采用基于三维DIC算法的三维应变测量中的光路系统,简化三维应变检测系统的结构,以及提高检测效率。

线结构光三维轮廓测量系统的标定方法.docx
线结构光三维轮廓测量系统的标定方法摘要:随着工业制造的不断发展,三维轮廓测量技术变得越来越重要。线结构光三维轮廓测量系统是一种常见的测量技术,它能够在较短的时间内获取高精度的三维点云数据。然而,在使用线结构光三维轮廓测量系统时,必须要进行标定,以确保测量结果的准确性。本文将介绍线结构光三维轮廓测量系统的标定方法,包括仪器标定和物体标定。Introduction:三维轮廓测量技术被广泛应用于工业制造、数字医疗、电子游戏和虚拟现实中。线结构光三维轮廓测量系统是一种常见的三维测量技术。该技术通过将一个照相机和一

结构光投影三维轮廓测量系统的标定.docx
结构光投影三维轮廓测量系统的标定近年来,随着数字化时代的到来,三维测量技术成为了科学研究、工业制造以及文化遗产保护等领域中不可或缺的工具。结构光投影三维轮廓测量系统(StructuredLightProjection3DScanningSystem)是一种常见的三维测量技术,它通过投影特定的光斑模式到被测物体表面,并根据反射光线的形态来重建出被测物体的三维轮廓。但是,这种方法需要对相机和光源之间的几何关系进行精确的标定。本文将详细讨论结构光投影三维轮廓测量系统的标定方法。一、结构光投影三维轮廓测量系统的组