
一种自适应变形驱动单元及变形驱动机构.pdf

努力****采萍

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种自适应变形驱动单元及变形驱动机构.pdf
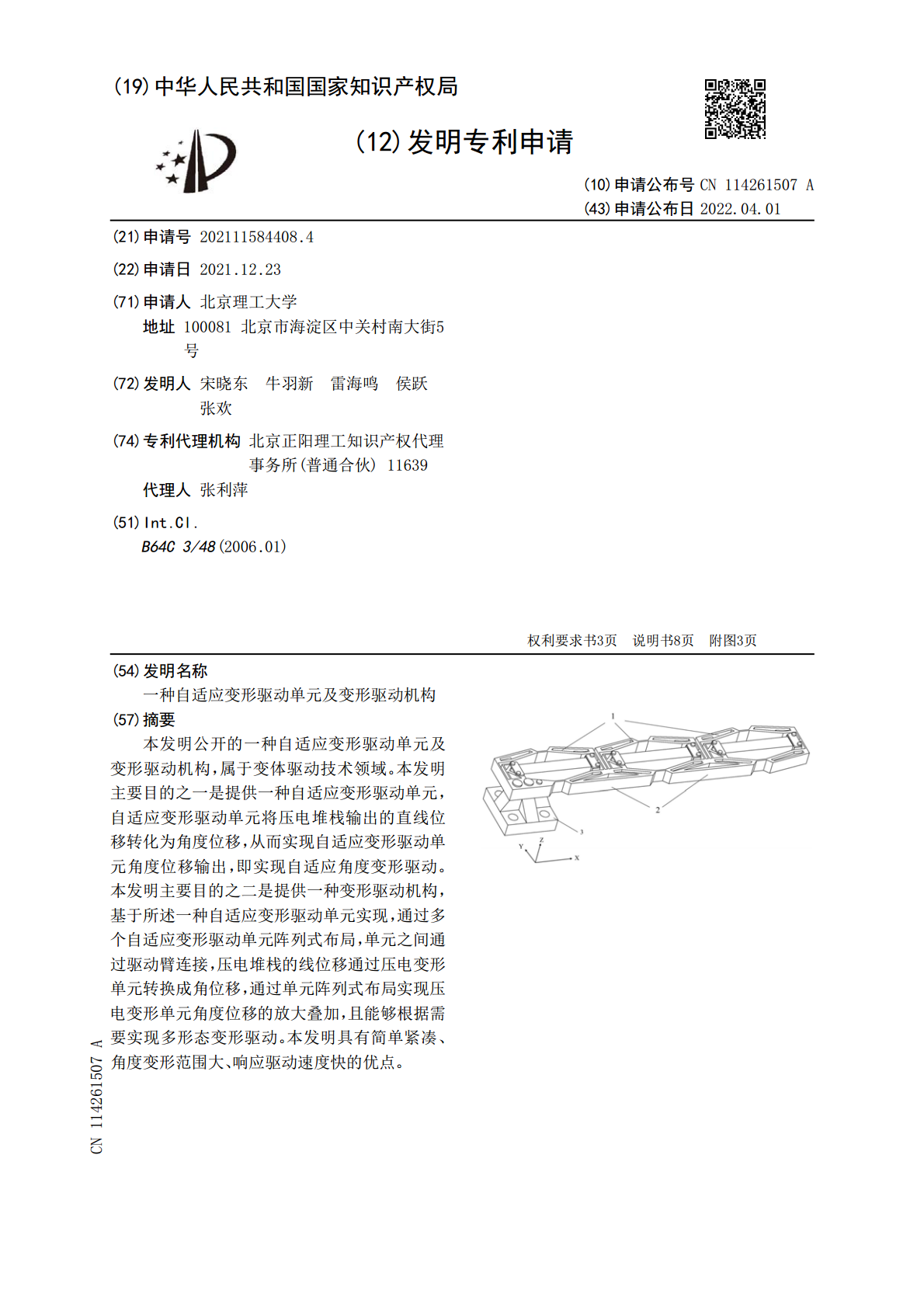
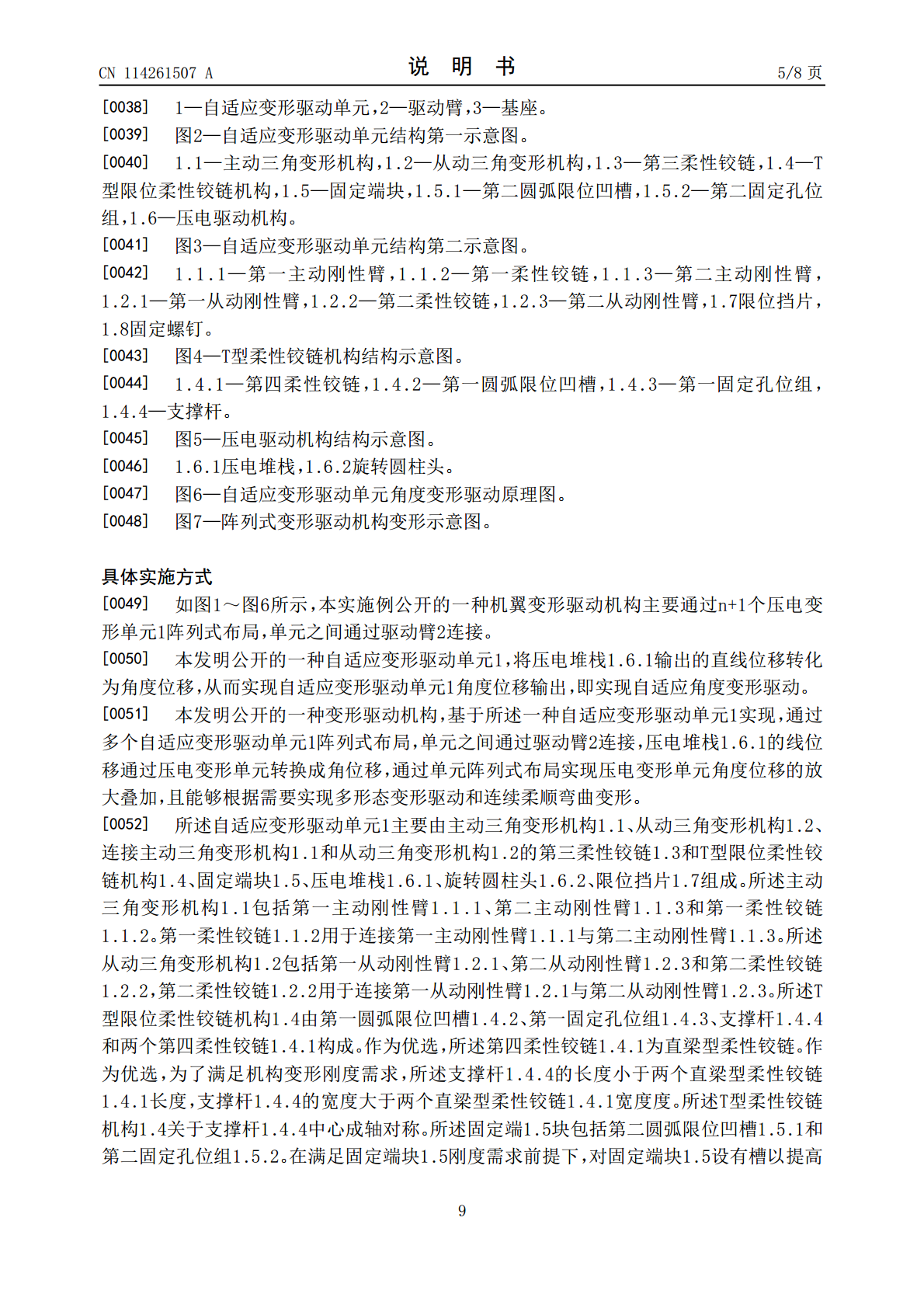
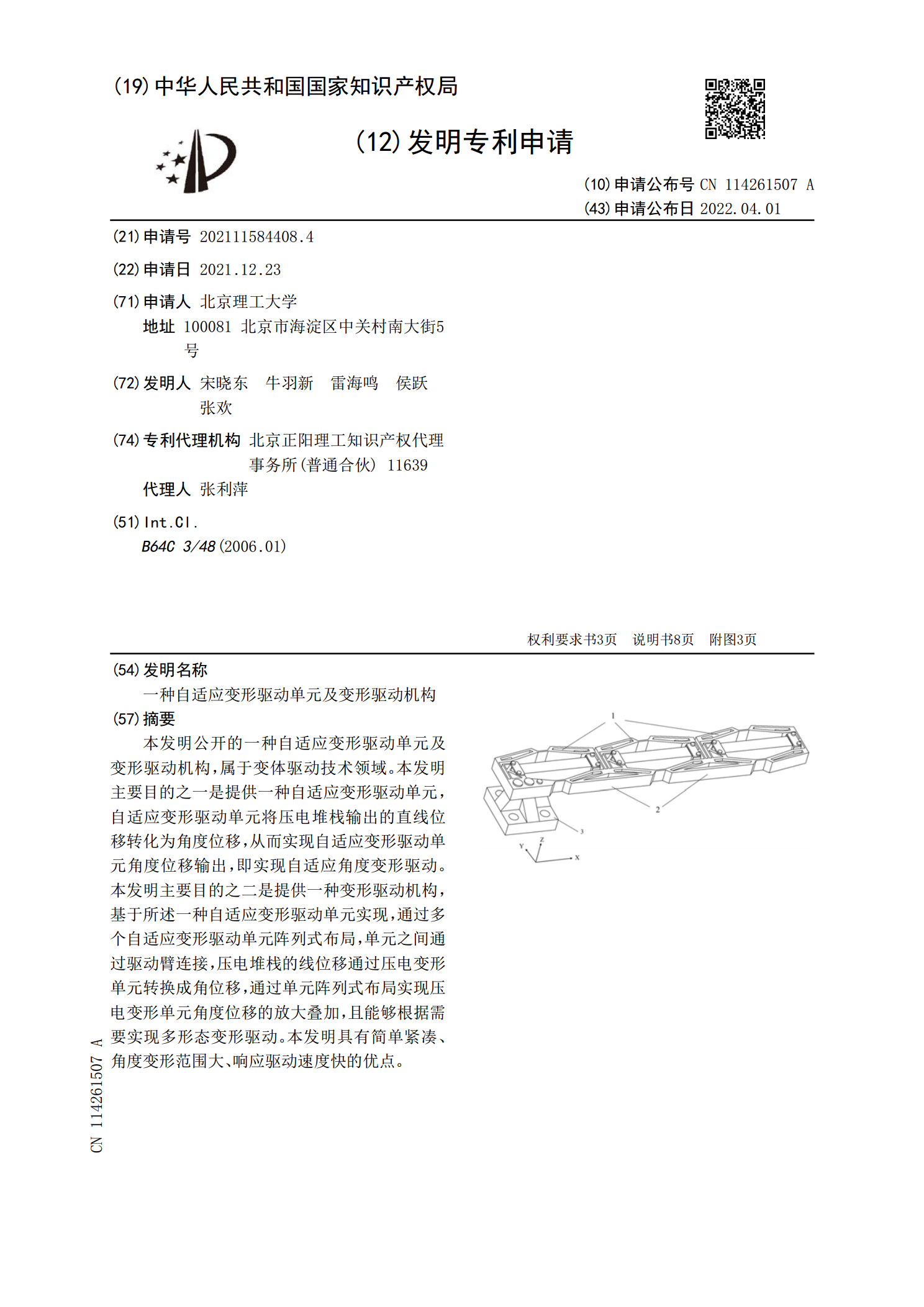
本发明公开的一种自适应变形驱动单元及变形驱动机构,属于变体驱动技术领域。本发明主要目的之一是提供一种自适应变形驱动单元,自适应变形驱动单元将压电堆栈输出的直线位移转化为角度位移,从而实现自适应变形驱动单元角度位移输出,即实现自适应角度变形驱动。本发明主要目的之二是提供一种变形驱动机构,基于所述一种自适应变形驱动单元实现,通过多个自适应变形驱动单元阵列式布局,单元之间通过驱动臂连接,压电堆栈的线位移通过压电变形单元转换成角位移,通过单元阵列式布局实现压电变形单元角度位移的放大叠加,且能够根据需要实现多形态变
一种用于重载变形轮的同步变形驱动机构.pdf
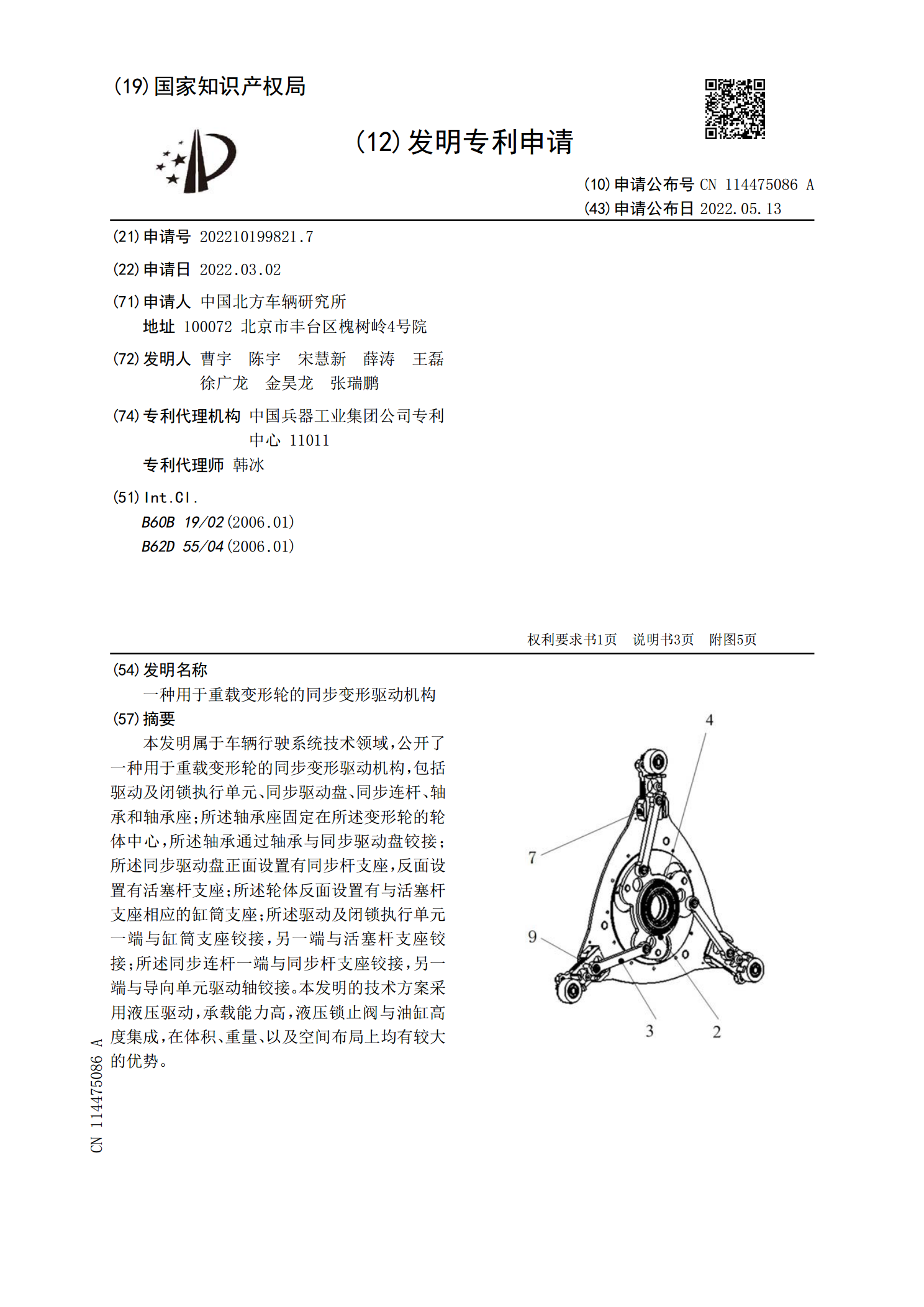
本发明属于车辆行驶系统技术领域,公开了一种用于重载变形轮的同步变形驱动机构,包括驱动及闭锁执行单元、同步驱动盘、同步连杆、轴承和轴承座;所述轴承座固定在所述变形轮的轮体中心,所述轴承通过轴承与同步驱动盘铰接;所述同步驱动盘正面设置有同步杆支座,反面设置有活塞杆支座;所述轮体反面设置有与活塞杆支座相应的缸筒支座;所述驱动及闭锁执行单元一端与缸筒支座铰接,另一端与活塞杆支座铰接;所述同步连杆一端与同步杆支座铰接,另一端与导向单元驱动轴铰接。本发明的技术方案采用液压驱动,承载能力高,液压锁止阀与油缸高度集成,在
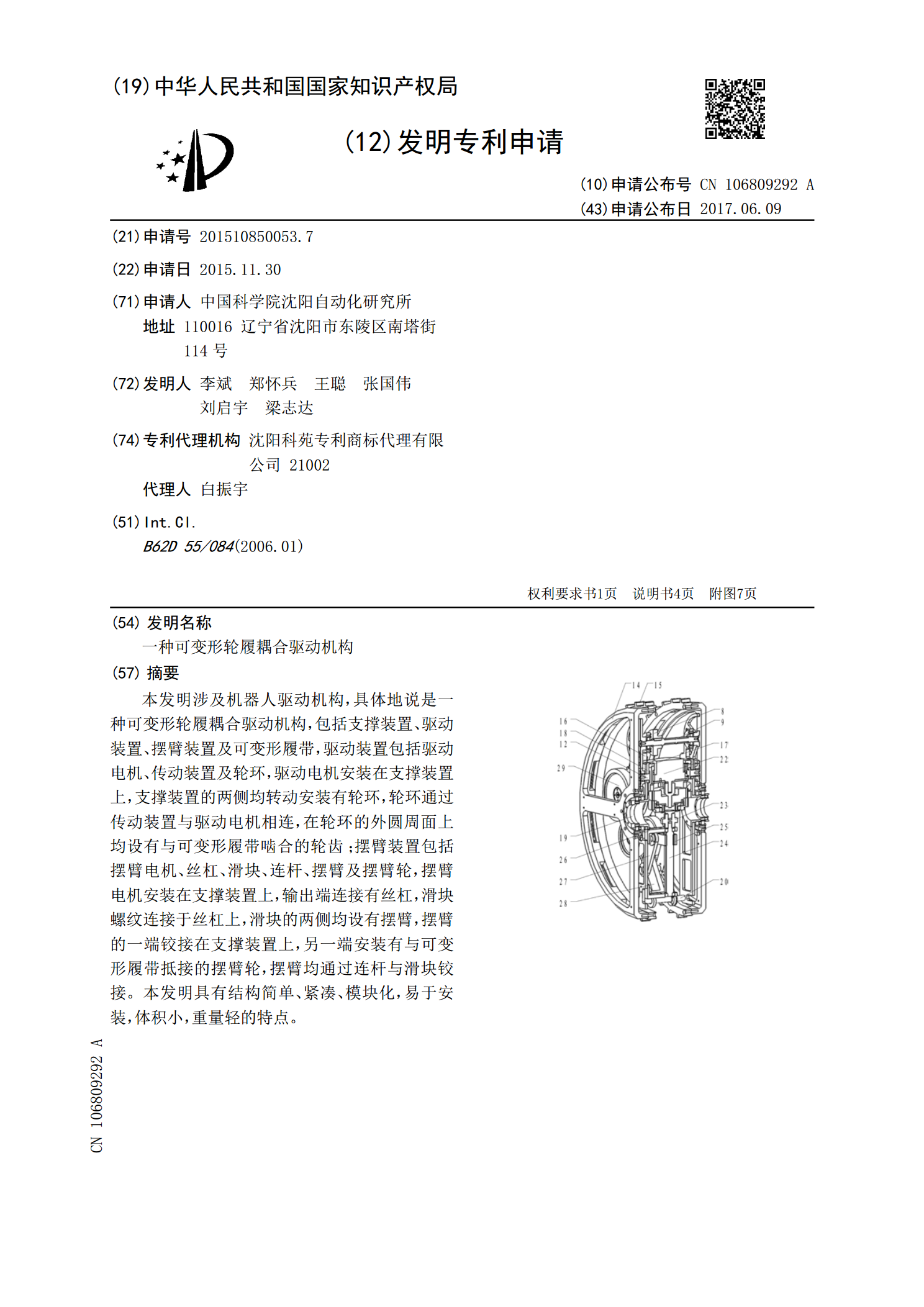
一种可变形轮履耦合驱动机构.pdf
本发明涉及机器人驱动机构,具体地说是一种可变形轮履耦合驱动机构,包括支撑装置、驱动装置、摆臂装置及可变形履带,驱动装置包括驱动电机、传动装置及轮环,驱动电机安装在支撑装置上,支撑装置的两侧均转动安装有轮环,轮环通过传动装置与驱动电机相连,在轮环的外圆周面上均设有与可变形履带啮合的轮齿;摆臂装置包括摆臂电机、丝杠、滑块、连杆、摆臂及摆臂轮,摆臂电机安装在支撑装置上,输出端连接有丝杠,滑块螺纹连接于丝杠上,滑块的两侧均设有摆臂,摆臂的一端铰接在支撑装置上,另一端安装有与可变形履带抵接的摆臂轮,摆臂均通过连杆与
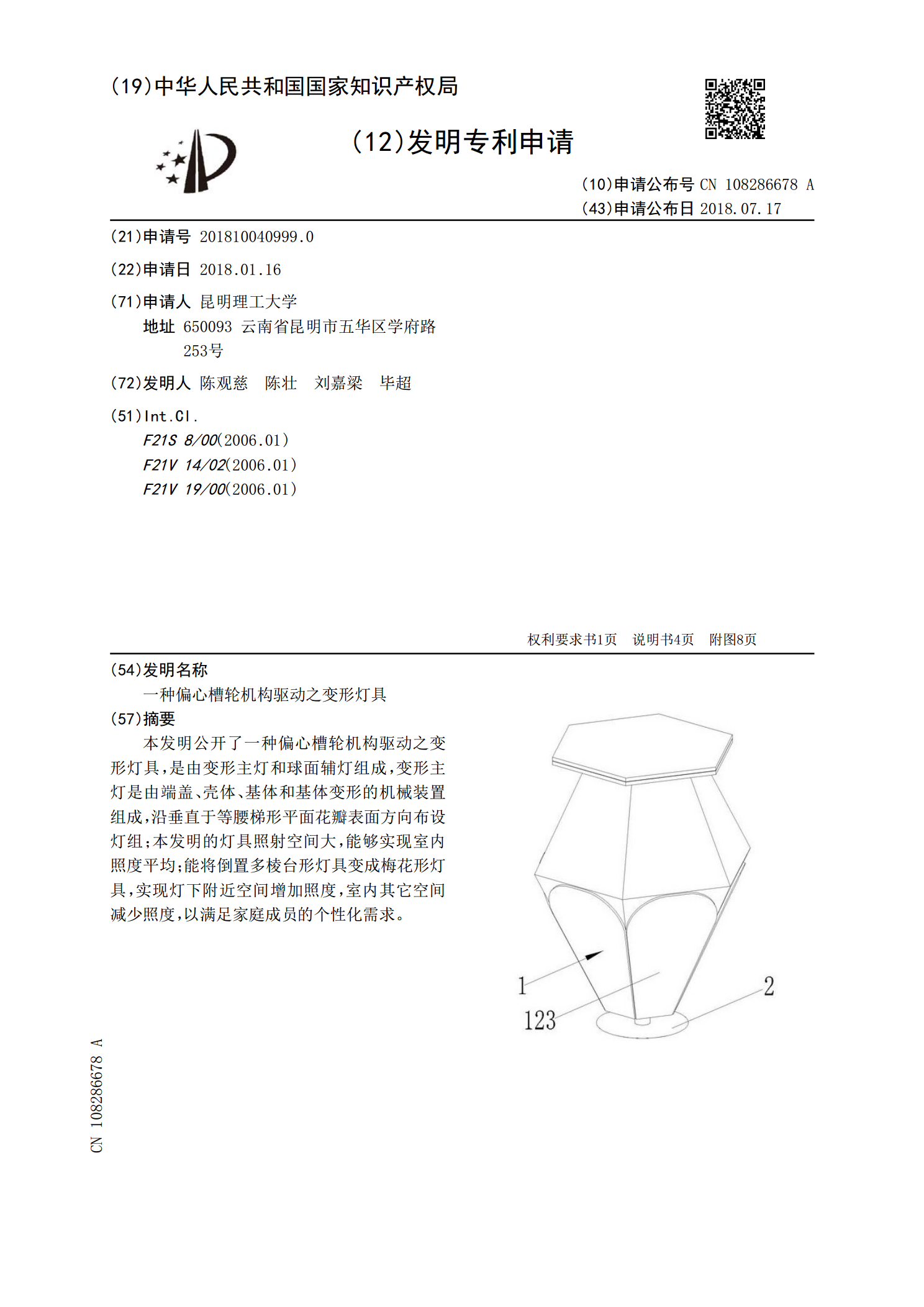
一种偏心槽轮机构驱动之变形灯具.pdf
本发明公开了一种偏心槽轮机构驱动之变形灯具,是由变形主灯和球面辅灯组成,变形主灯是由端盖、壳体、基体和基体变形的机械装置组成,沿垂直于等腰梯形平面花瓣表面方向布设灯组;本发明的灯具照射空间大,能够实现室内照度平均;能将倒置多棱台形灯具变成梅花形灯具,实现灯下附近空间增加照度,室内其它空间减少照度,以满足家庭成员的个性化需求。
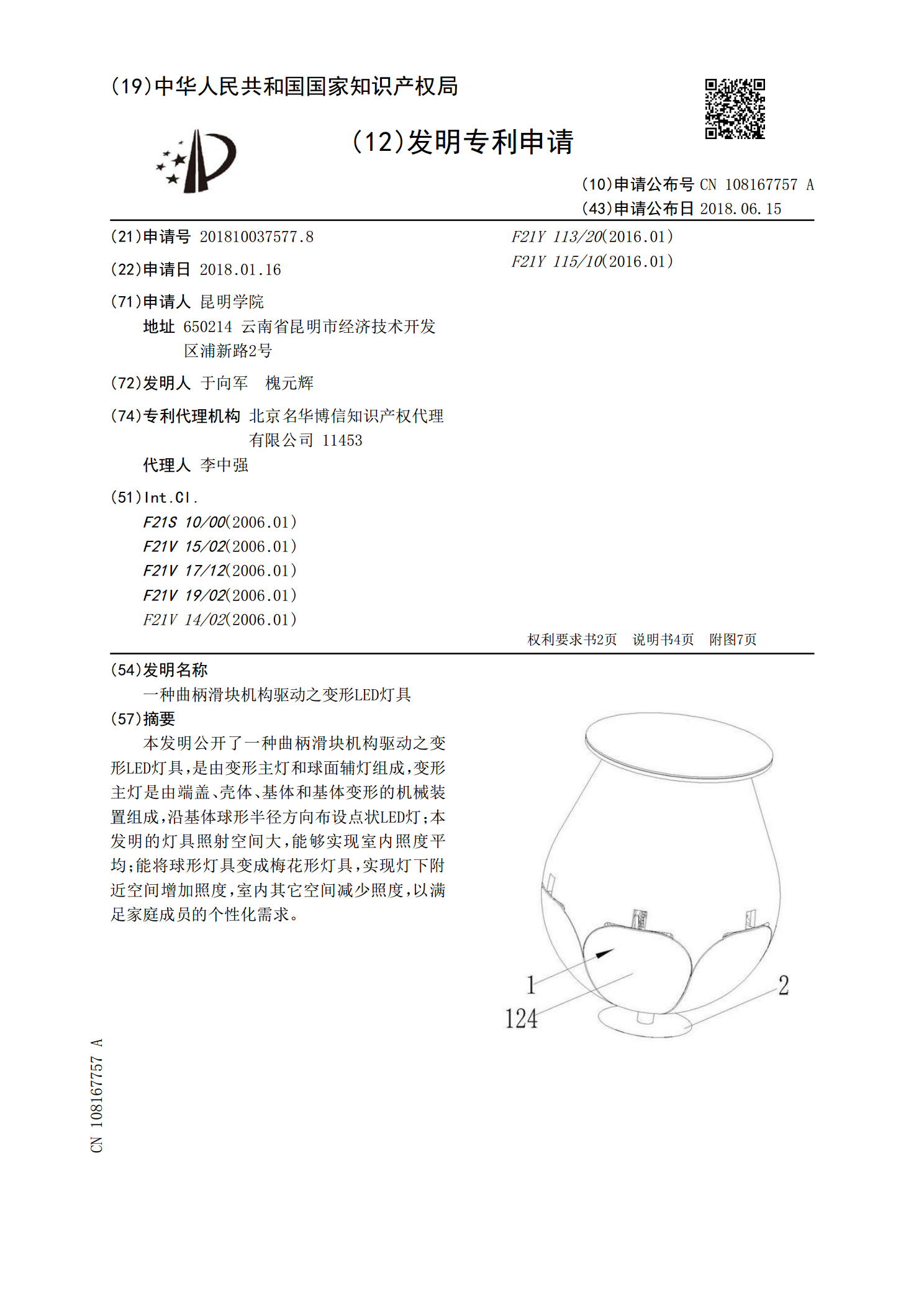
一种曲柄滑块机构驱动之变形LED灯具.pdf
本发明公开了一种曲柄滑块机构驱动之变形LED灯具,是由变形主灯和球面辅灯组成,变形主灯是由端盖、壳体、基体和基体变形的机械装置组成,沿基体球形半径方向布设点状LED灯;本发明的灯具照射空间大,能够实现室内照度平均;能将球形灯具变成梅花形灯具,实现灯下附近空间增加照度,室内其它空间减少照度,以满足家庭成员的个性化需求。