
一种基于无人机电力巡检的缺陷检测系统及方法.pdf

景福****90


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于无人机电力巡检的缺陷检测系统及方法.pdf
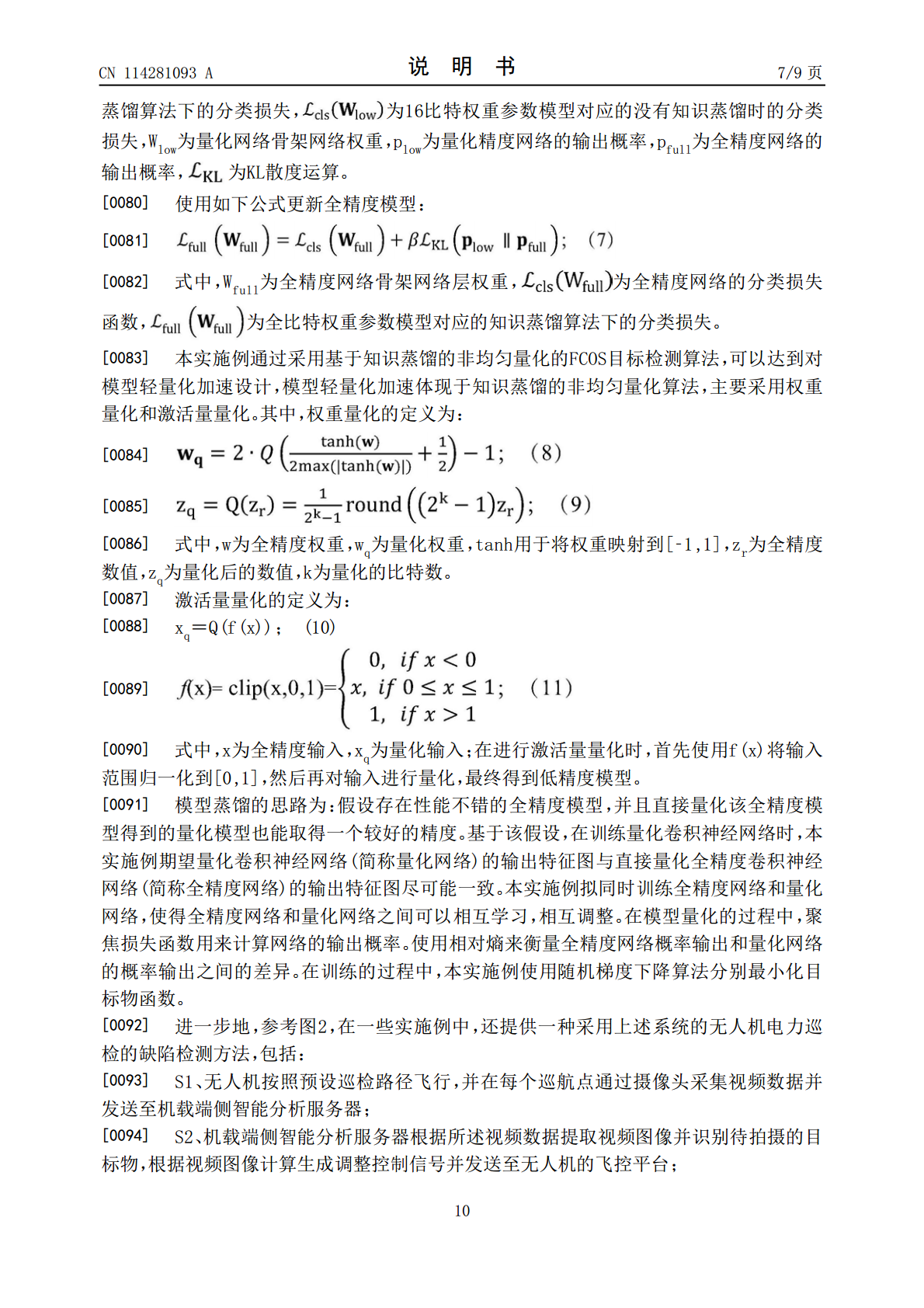
本发明涉及一种基于无人机电力巡检的缺陷检测系统及方法,该系统包括:无人机和机巢侧智能分析服务器,无人机上设置有摄像头、机载端侧智能分析服务器和飞控平台;无人机按照预设巡检路径飞行,并在每个巡航点通过摄像头采集视频数据并发送至机载端侧智能分析服务器;机载端侧智能分析服务器根据视频数据提取视频图像并识别待拍摄的目标物,根据视频图像计算生成调整控制信号并调整无人机的飞行姿态,之后通过摄像头采集目标物图像;无人机完成巡检时将目标物图像发送至机巢侧智能分析服务器进行缺陷检测;本系统可以完成巡检过程中的自动拍摄任务,

电力巡检图像缺陷识别方法和系统、电力巡检无人机.pdf
本发明公开了一种电力巡检图像缺陷识别方法,包括:创建并且级联目标检测网络和多个分类网络;获取若干帧巡检图像样本,对巡检图像样本中的目标进行标注,生成训练样本集;采用训练样本集对级联网络进行训练,其中,每一网络层的量化参数与其所在网络层的量化级数和量化的范围相关;采用训练好的级联网络对新获取的巡检图像中的缺陷进行识别。本发明能够针对电网杆塔及架空线路的运维,给出了一种有效的FPGA机载识别系统,相应的量化函数可以确保不同网络层的不同通道均能得到合适的量化,最大限度地保留网络的精度;通过级联目标检测网络和分类
一种基于无人机的电力线路巡检方法及系统.pdf
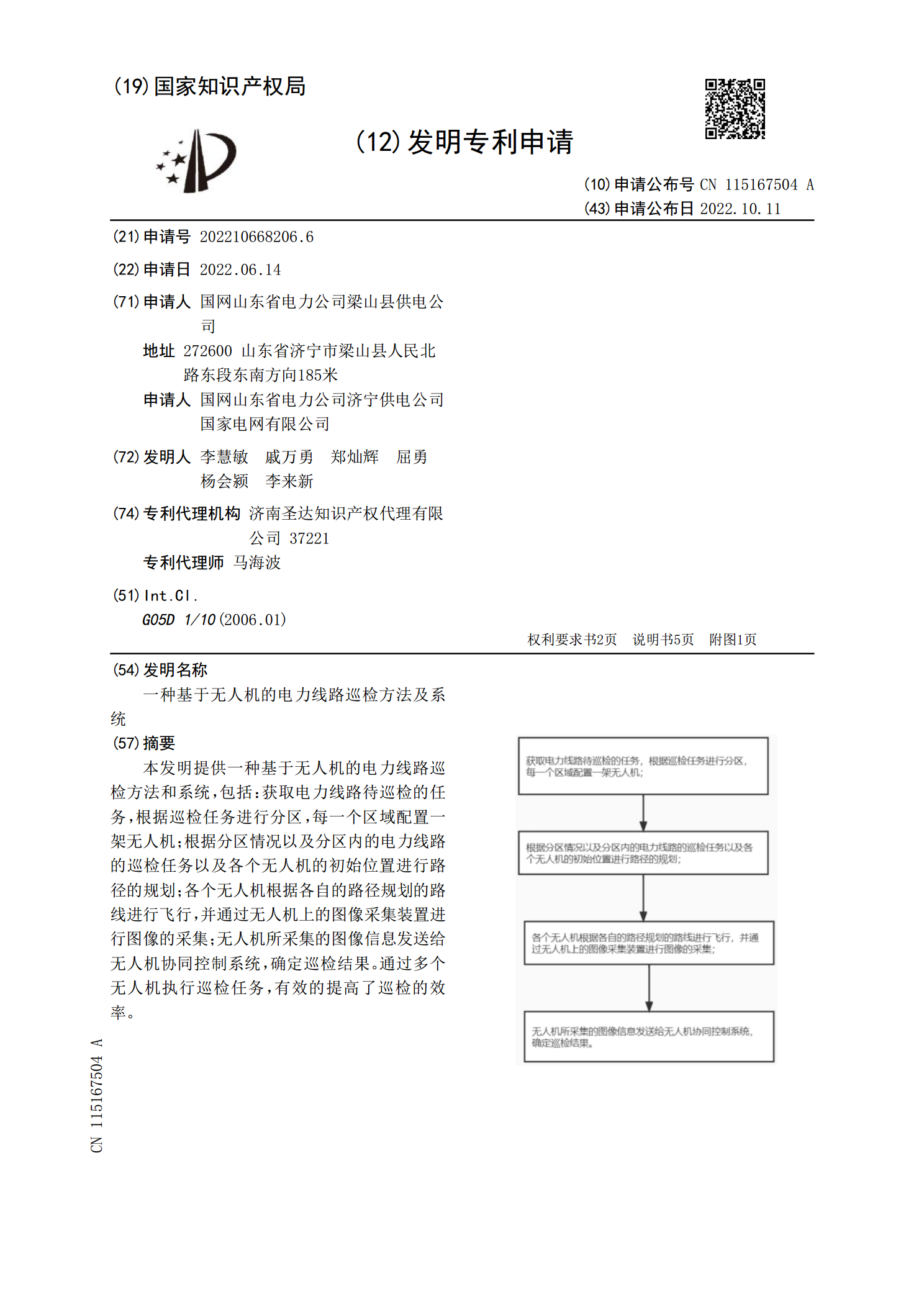
本发明提供一种基于无人机的电力线路巡检方法和系统,包括:获取电力线路待巡检的任务,根据巡检任务进行分区,每一个区域配置一架无人机;根据分区情况以及分区内的电力线路的巡检任务以及各个无人机的初始位置进行路径的规划;各个无人机根据各自的路径规划的路线进行飞行,并通过无人机上的图像采集装置进行图像的采集;无人机所采集的图像信息发送给无人机协同控制系统,确定巡检结果。通过多个无人机执行巡检任务,有效的提高了巡检的效率。

一种基于无人机的电力巡检方法.pdf
本发明涉及电力巡检技术领域,且公开了一种基于无人机的电力巡检方法,包括以下步骤,无人机搭载照明系统、红外成像系统、视频录像系统、红外测距系统、GPS定位系统、控制系统和信号收发系统,地面设置信号收发器和显示器,制定巡检线路,根据电力系统的走向制定合理的无人机巡检路线,清理路线中的林木障碍。该基于无人机的电力巡检方法,通过线路障碍规避记录,无人机在巡检过程中,红外测距系统采集无人机与地面的距离数据,判断林木滋长情况如此,无人机巡检路线下的树木如果滋长到快要威胁无人机的高度时,地面人员可以派人前去砍伐修剪这些
一种面向电力巡检场景的小目标缺陷检测方法及系统.pdf
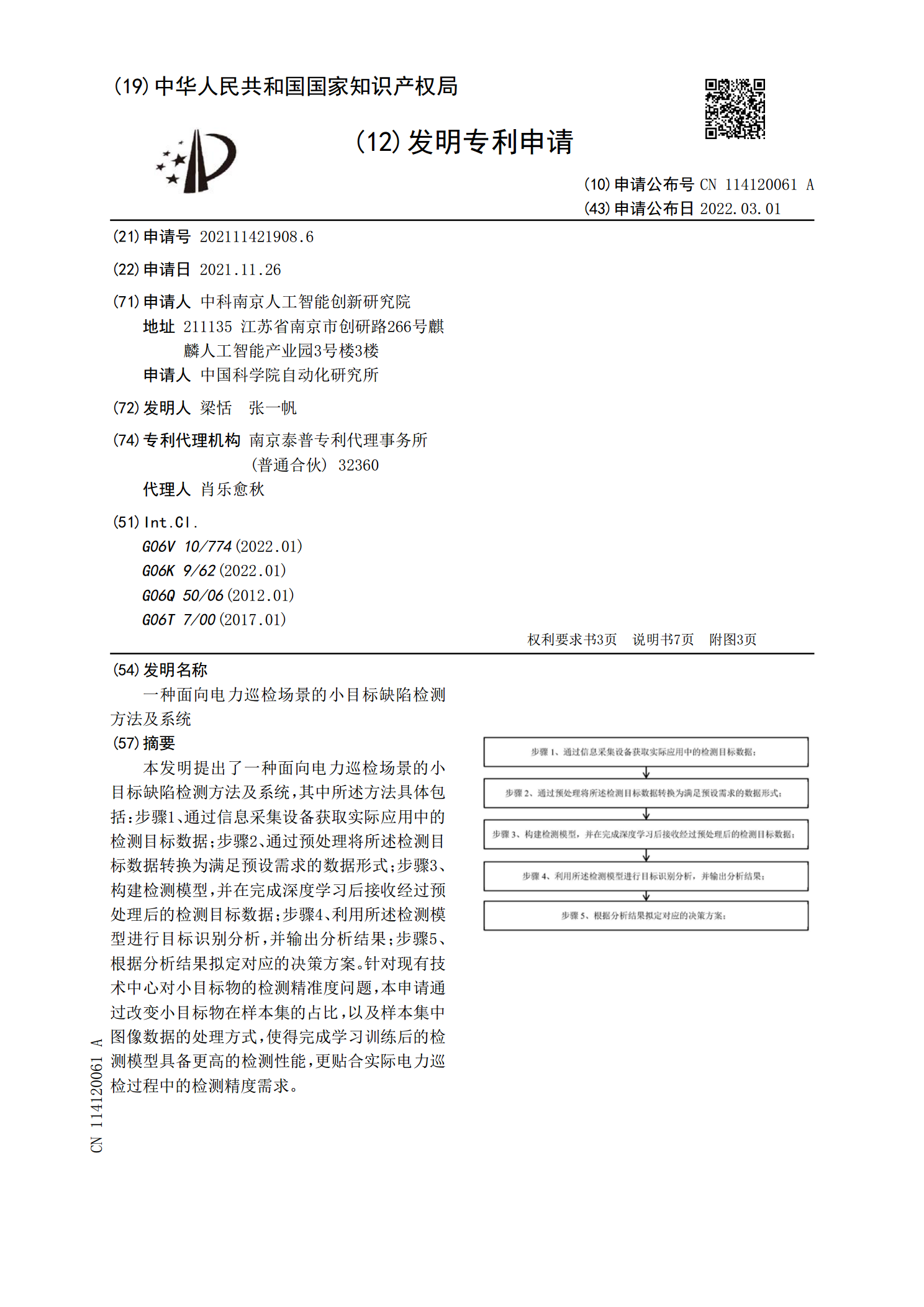
本发明提出了一种面向电力巡检场景的小目标缺陷检测方法及系统,其中所述方法具体包括:步骤1、通过信息采集设备获取实际应用中的检测目标数据;步骤2、通过预处理将所述检测目标数据转换为满足预设需求的数据形式;步骤3、构建检测模型,并在完成深度学习后接收经过预处理后的检测目标数据;步骤4、利用所述检测模型进行目标识别分析,并输出分析结果;步骤5、根据分析结果拟定对应的决策方案。针对现有技术中心对小目标物的检测精准度问题,本申请通过改变小目标物在样本集的占比,以及样本集中图像数据的处理方式,使得完成学习训练后的检测