
图像的目标区域获取方法、装置、设备、介质和程序产品.pdf

安双****文章

1/10

2/10
3/10
4/10
5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
图像的目标区域获取方法、装置、设备、介质和程序产品.pdf
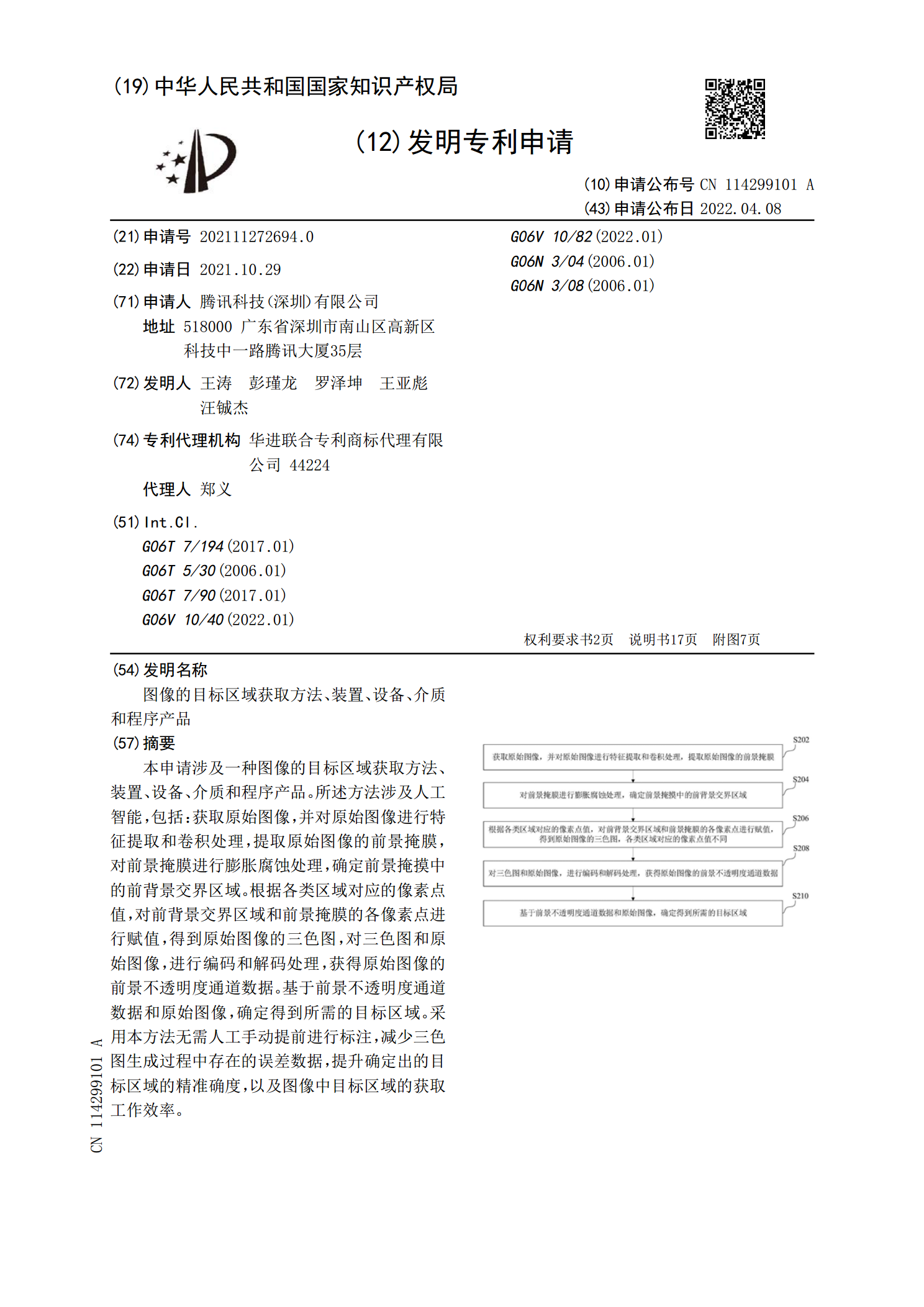
本申请涉及一种图像的目标区域获取方法、装置、设备、介质和程序产品。所述方法涉及人工智能,包括:获取原始图像,并对原始图像进行特征提取和卷积处理,提取原始图像的前景掩膜,对前景掩膜进行膨胀腐蚀处理,确定前景掩摸中的前背景交界区域。根据各类区域对应的像素点值,对前背景交界区域和前景掩膜的各像素点进行赋值,得到原始图像的三色图,对三色图和原始图像,进行编码和解码处理,获得原始图像的前景不透明度通道数据。基于前景不透明度通道数据和原始图像,确定得到所需的目标区域。采用本方法无需人工手动提前进行标注,减少三色图生成

目标区域定位方法、装置、设备、介质和程序产品.pdf
本公开提供了一种目标区域定位方法,包括:获取被检查行李的第一三维体数据。基于第一三维体数据,生成被检查行李在第一方向上的第一投影图像。基于第一投影图像绘制选取层,该选取层的延伸平面平行于第一方向。然后生成选取层在第二方向上的第二投影图像,第二方向垂直于选取层的延伸平面。基于第二投影图像确定该选取层是否仅包含被检查行李中的目标物体的包络区域。如果是,则将该选取层作为目标区域。本公开还提供了一种目标区域定位装置、设备、介质和程序产品。

游戏资源的获取方法、装置、介质、设备和程序产品.pdf
本申请提供了一种游戏资源的获取方法、装置、介质、设备和计算机程序产品,可应用于游戏、游戏基础技术、游戏策略等各种场景。该方法包括:显示目标游戏的虚拟场景,虚拟场景包括第一界面元素和第一虚拟对象;响应于针对第一虚拟对象的移动信号,控制第一虚拟对象在虚拟场景中移动;响应于针对第一界面元素的第一操作信号,显示第一界面元素对应的虚拟角色,其中,控制虚拟角色在虚拟场景中按照第一预设轨迹飞行,且在预设时间后,响应于虚拟角色的属性值高于第一阈值,控制虚拟角色在虚拟场景中按照第二预设轨迹飞行;响应于虚拟角色的属性值低于第

图像渲染的方法、装置、设备、介质和程序产品.pdf
本公开提供了一种图像渲染的方法,可以应用于图像处理技术领域。该图像渲染的方法包括:获取模型文件、空闲时间和内存剩余空间,所述模型文件包括多个网格数据,所述空闲时间包括每一帧中处理资源未被占用的时间,所述内存剩余空间包括存储相关处理过程中产生的数据;设置批次信息,所述批次信息包括预设处理数量的网格数据为一个批次;以及在同时满足所述空闲时间大于预设时间阈值和所述内存剩余空间大于预设内存阈值的情况下,基于批次对预设处理数量的所述网格数据执行相关处理,用以得到渲染后的图像。本公开还提供了一种图像渲染的装置、设备、
图像分享方法、装置、设备、存储介质和程序产品.pdf
本申请公开了一种图像分享方法、装置、设备、存储介质和程序产品,属于互联网技术领域。该方法包括:接收用户的第一输入;响应于所述第一输入,将至少两张目标图像分享至与第一人物图像对应的第一联系人;所述第一人物图像为所述至少两张目标图像中相同人物对应的人物图像。