
一种图像对齐方法、装置、电子设备和存储介质.pdf

小云****66

1/10

2/10
3/10
4/10

5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种图像对齐方法、装置、电子设备和存储介质.pdf
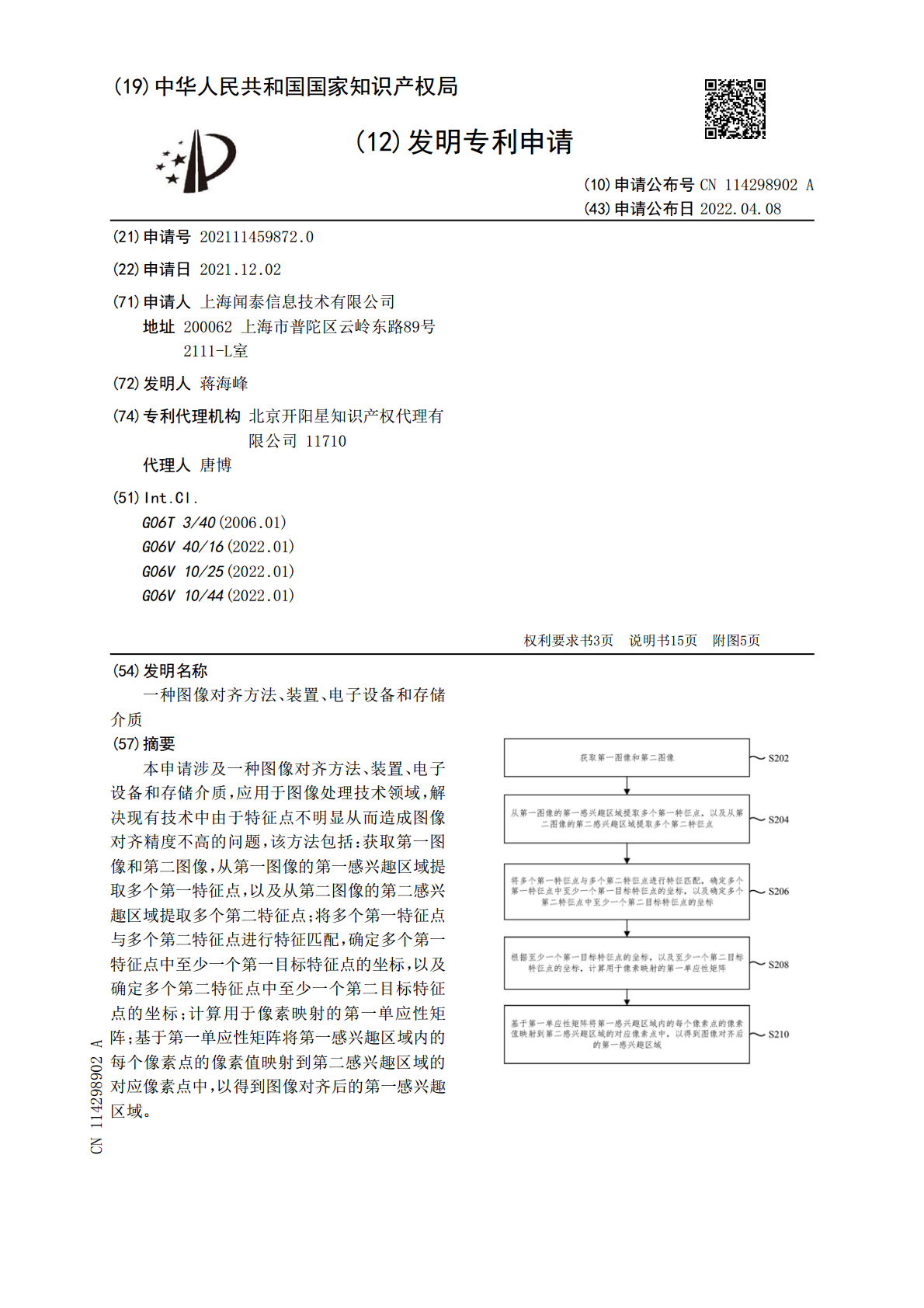
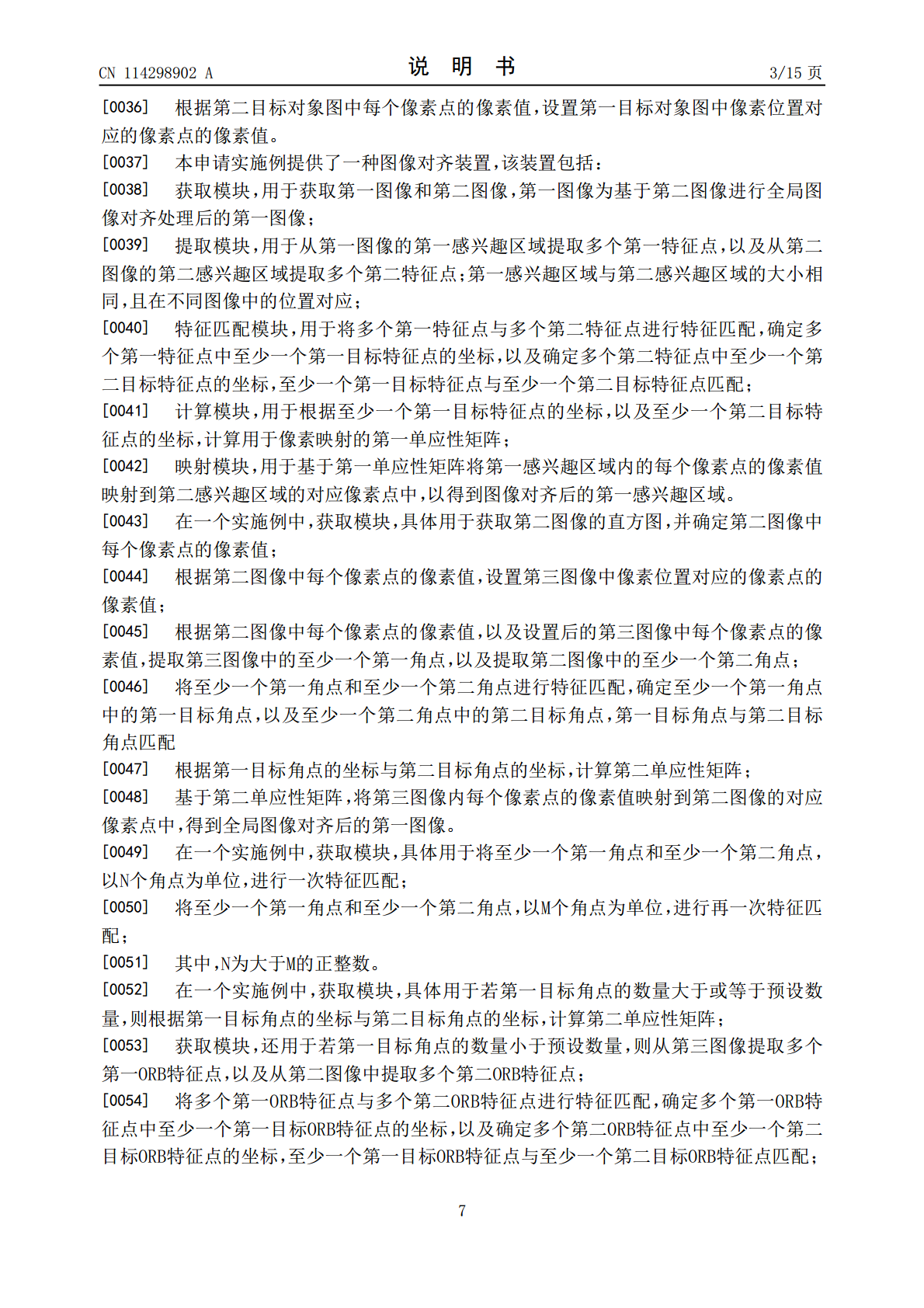
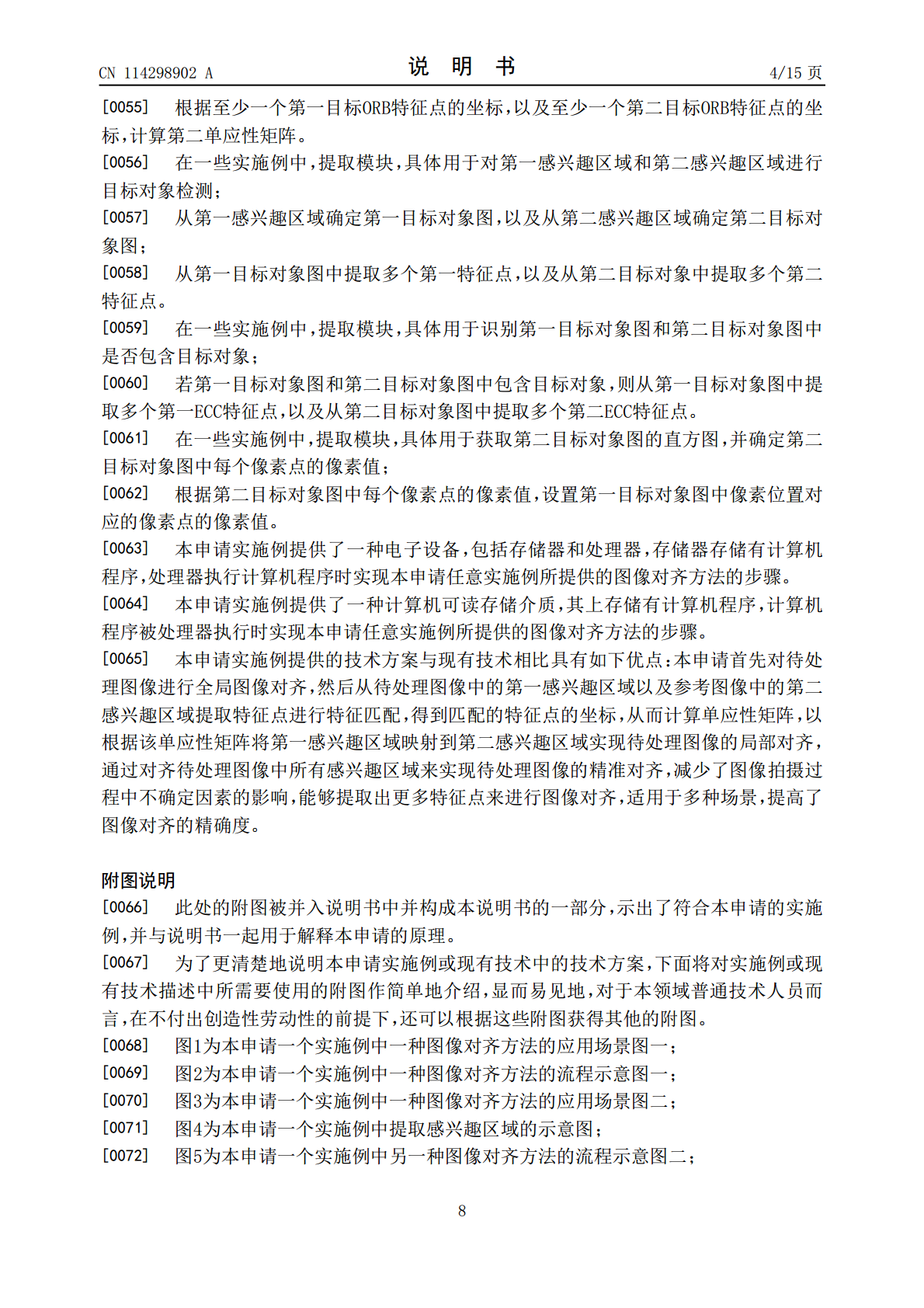
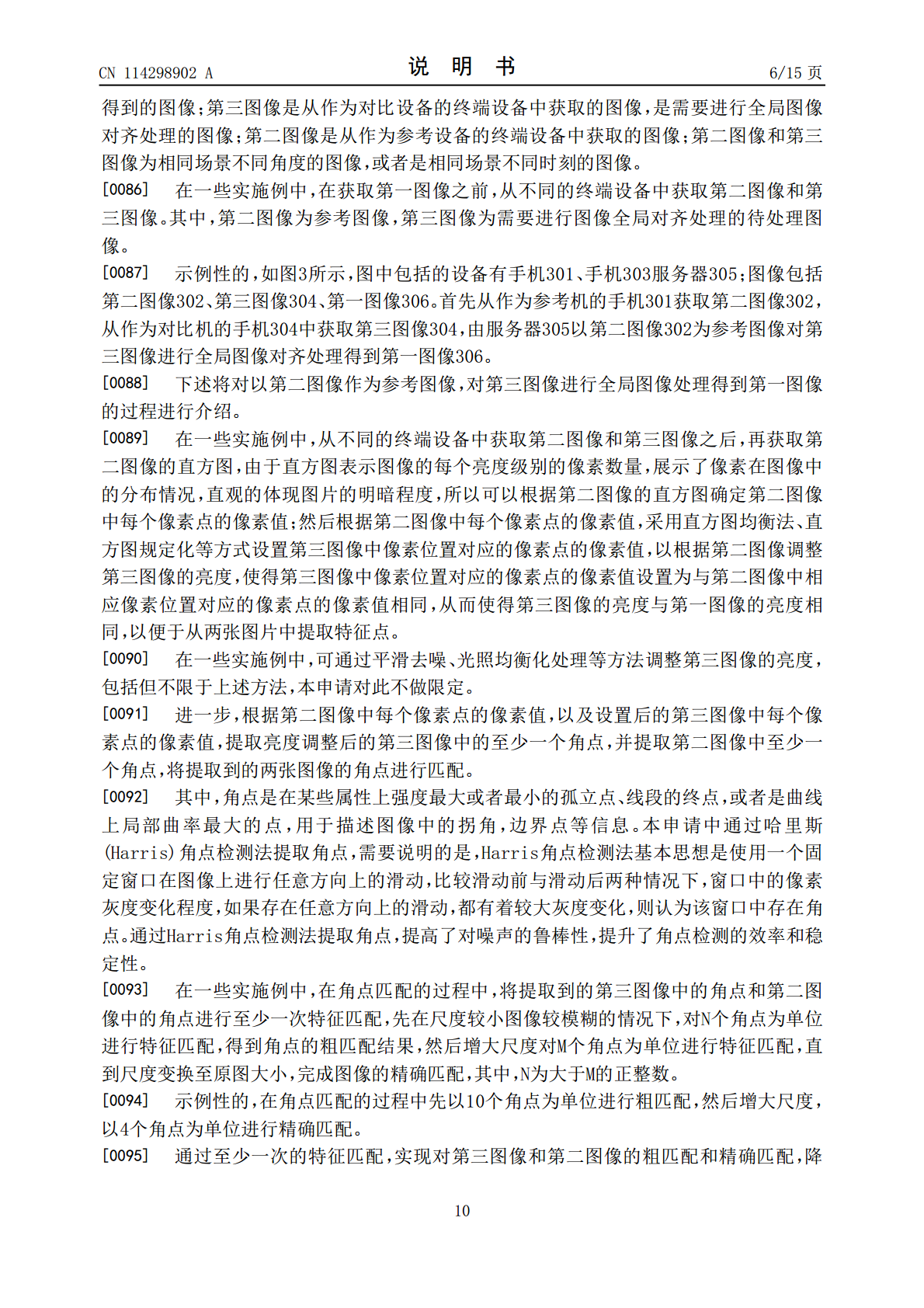
本申请涉及一种图像对齐方法、装置、电子设备和存储介质,应用于图像处理技术领域,解决现有技术中由于特征点不明显从而造成图像对齐精度不高的问题,该方法包括:获取第一图像和第二图像,从第一图像的第一感兴趣区域提取多个第一特征点,以及从第二图像的第二感兴趣区域提取多个第二特征点;将多个第一特征点与多个第二特征点进行特征匹配,确定多个第一特征点中至少一个第一目标特征点的坐标,以及确定多个第二特征点中至少一个第二目标特征点的坐标;计算用于像素映射的第一单应性矩阵;基于第一单应性矩阵将第一感兴趣区域内的每个像素点的像素
图像对齐方法及装置、存储介质及电子设备.pdf
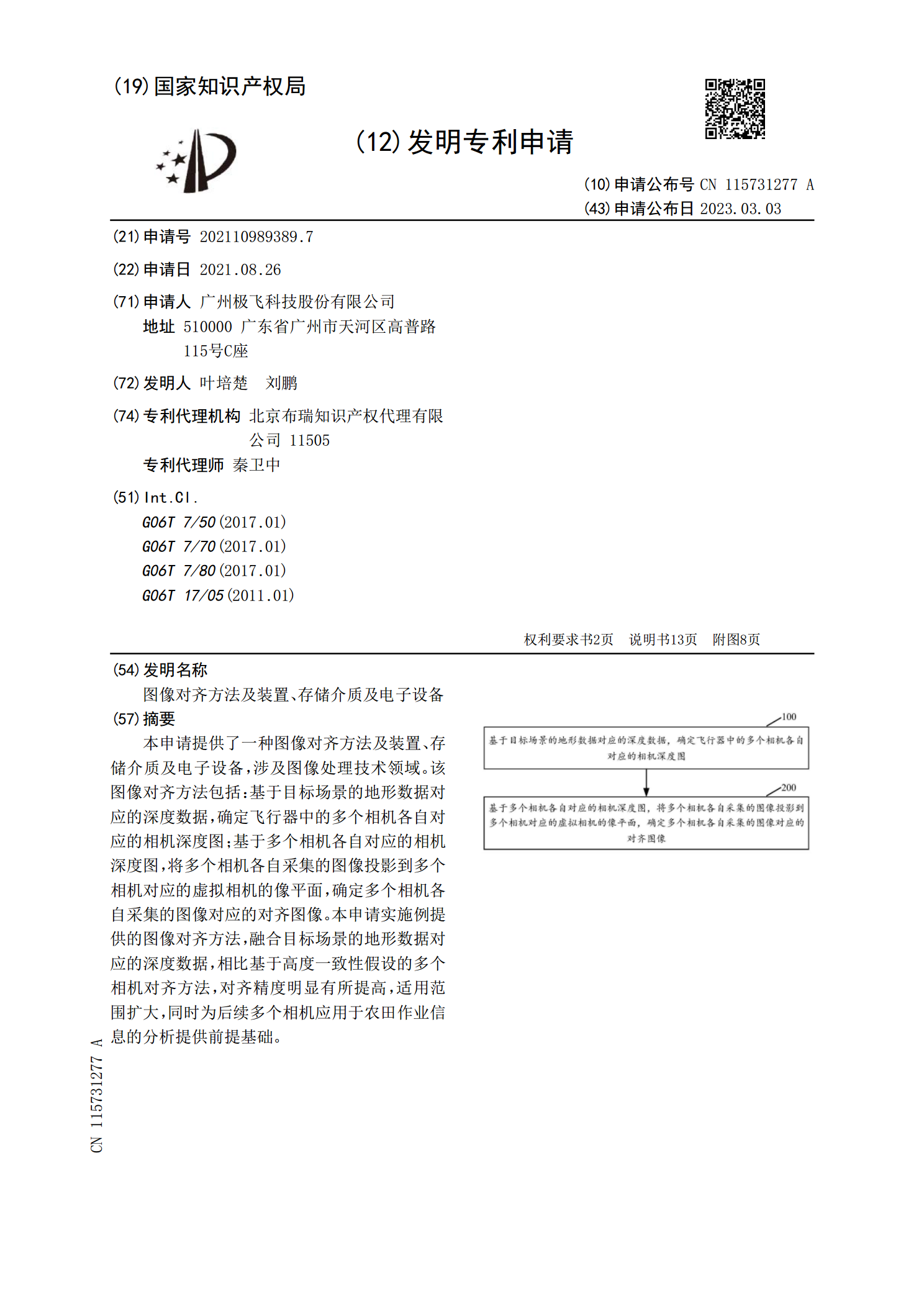
本申请提供了一种图像对齐方法及装置、存储介质及电子设备,涉及图像处理技术领域。该图像对齐方法包括:基于目标场景的地形数据对应的深度数据,确定飞行器中的多个相机各自对应的相机深度图;基于多个相机各自对应的相机深度图,将多个相机各自采集的图像投影到多个相机对应的虚拟相机的像平面,确定多个相机各自采集的图像对应的对齐图像。本申请实施例提供的图像对齐方法,融合目标场景的地形数据对应的深度数据,相比基于高度一致性假设的多个相机对齐方法,对齐精度明显有所提高,适用范围扩大,同时为后续多个相机应用于农田作业信息的分析提
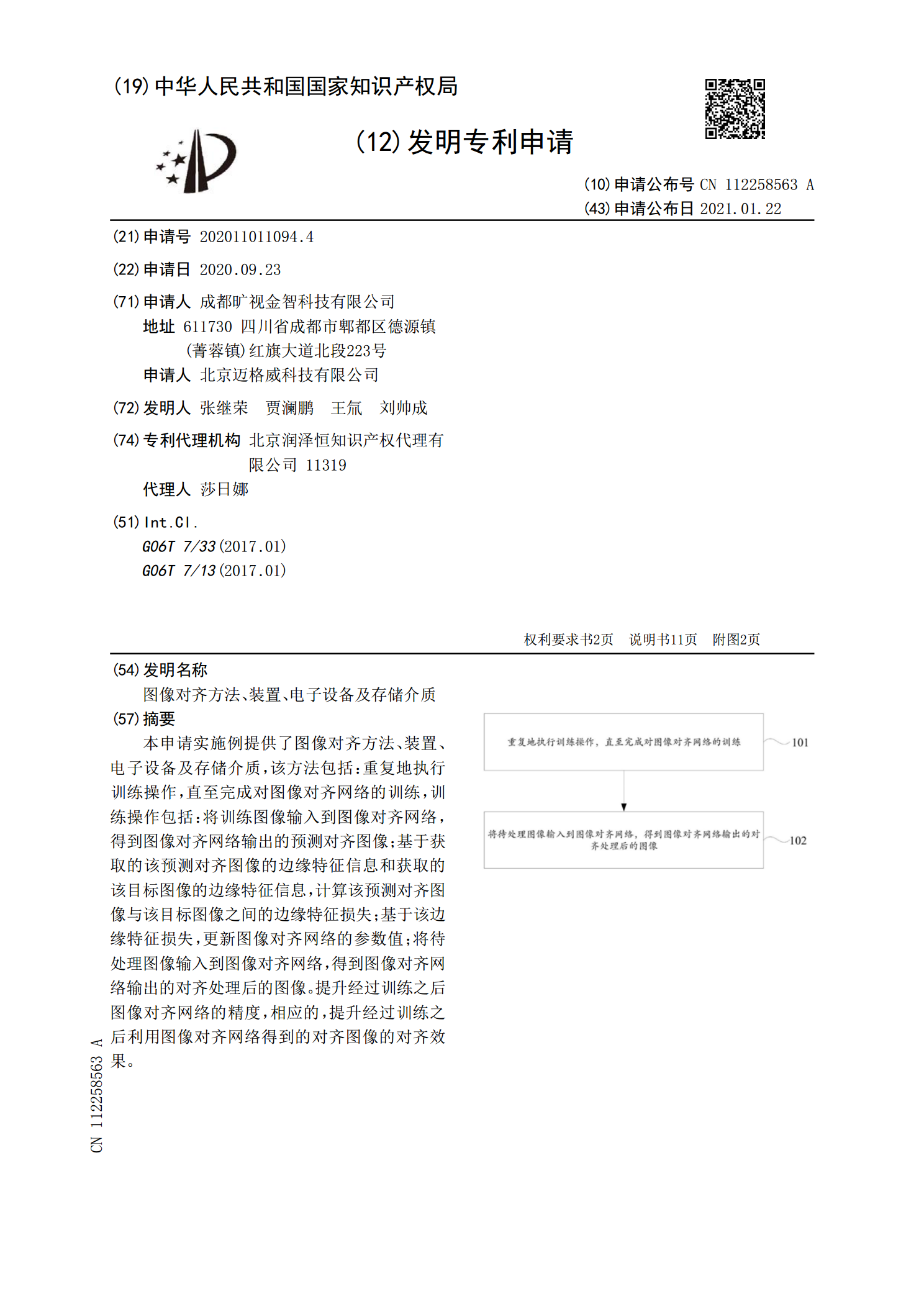
图像对齐方法、装置、电子设备及存储介质.pdf
本申请实施例提供了图像对齐方法、装置、电子设备及存储介质,该方法包括:重复地执行训练操作,直至完成对图像对齐网络的训练,训练操作包括:将训练图像输入到图像对齐网络,得到图像对齐网络输出的预测对齐图像;基于获取的该预测对齐图像的边缘特征信息和获取的该目标图像的边缘特征信息,计算该预测对齐图像与该目标图像之间的边缘特征损失;基于该边缘特征损失,更新图像对齐网络的参数值;将待处理图像输入到图像对齐网络,得到图像对齐网络输出的对齐处理后的图像。提升经过训练之后图像对齐网络的精度,相应的,提升经过训练之后利用图像对
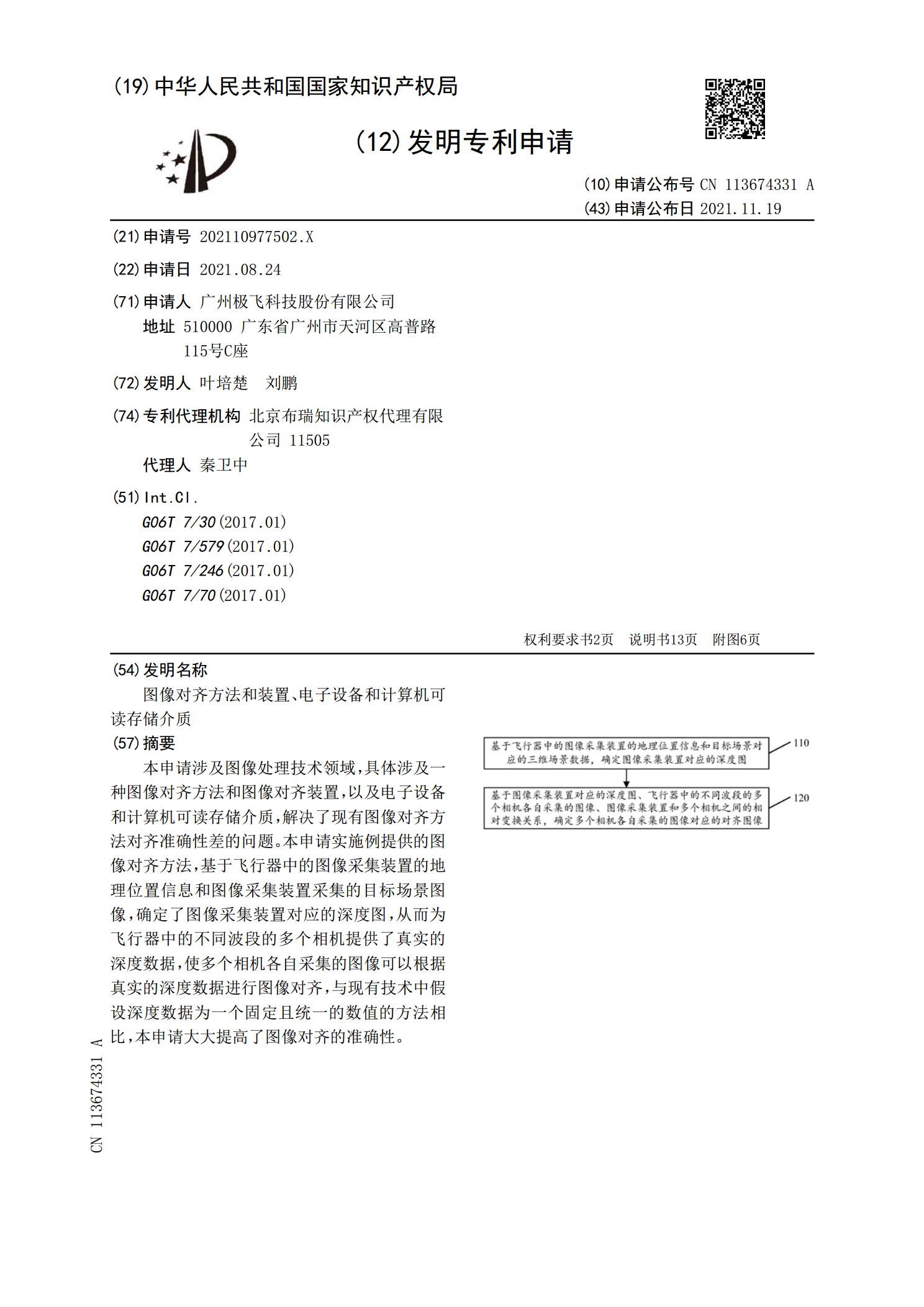
图像对齐方法和装置、电子设备和计算机可读存储介质.pdf
本申请涉及图像处理技术领域,具体涉及一种图像对齐方法和图像对齐装置,以及电子设备和计算机可读存储介质,解决了现有图像对齐方法对齐准确性差的问题。本申请实施例提供的图像对齐方法,基于飞行器中的图像采集装置的地理位置信息和图像采集装置采集的目标场景图像,确定了图像采集装置对应的深度图,从而为飞行器中的不同波段的多个相机提供了真实的深度数据,使多个相机各自采集的图像可以根据真实的深度数据进行图像对齐,与现有技术中假设深度数据为一个固定且统一的数值的方法相比,本申请大大提高了图像对齐的准确性。
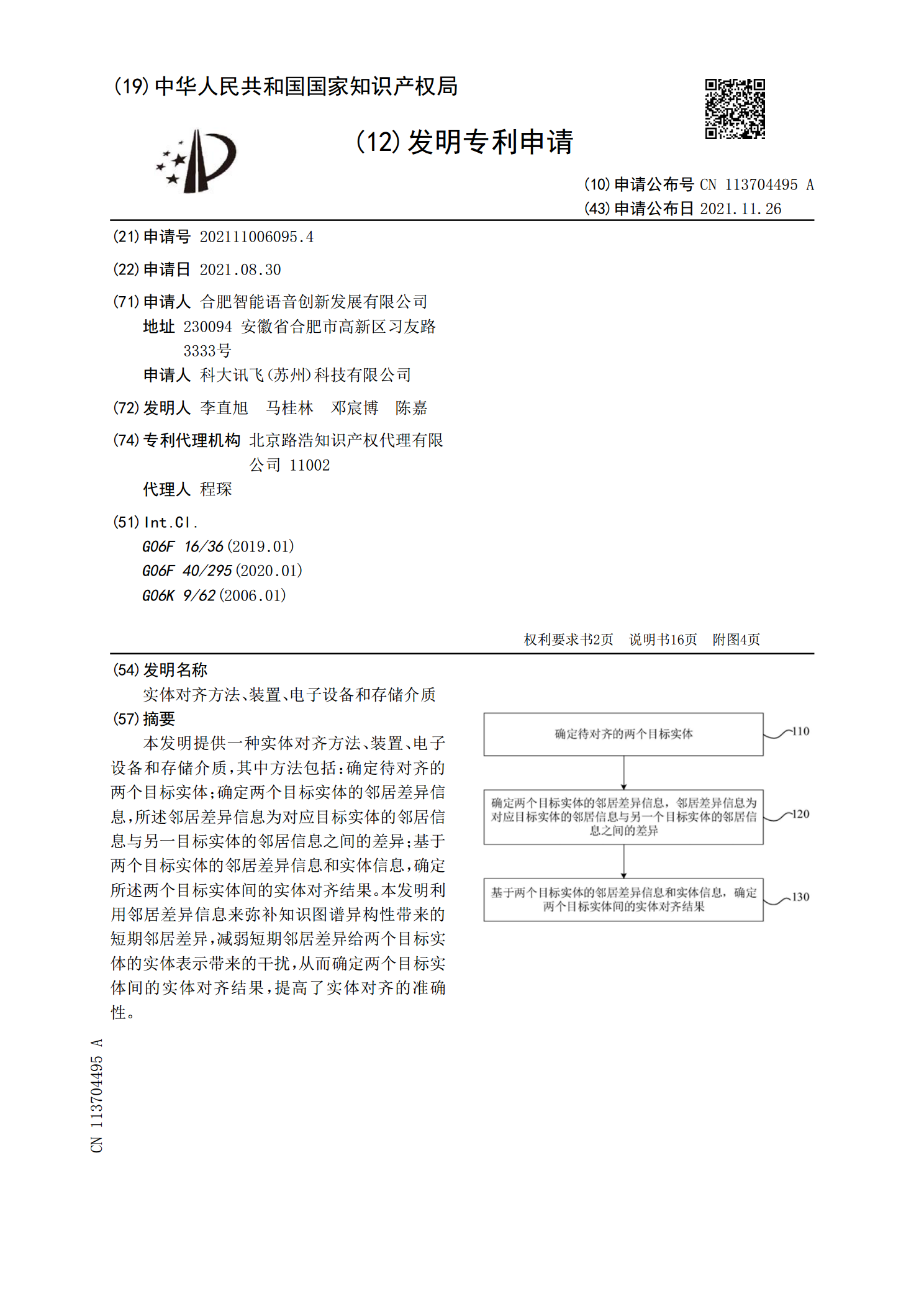
实体对齐方法、装置、电子设备和存储介质.pdf
本发明提供一种实体对齐方法、装置、电子设备和存储介质,其中方法包括:确定待对齐的两个目标实体;确定两个目标实体的邻居差异信息,所述邻居差异信息为对应目标实体的邻居信息与另一目标实体的邻居信息之间的差异;基于两个目标实体的邻居差异信息和实体信息,确定所述两个目标实体间的实体对齐结果。本发明利用邻居差异信息来弥补知识图谱异构性带来的短期邻居差异,减弱短期邻居差异给两个目标实体的实体表示带来的干扰,从而确定两个目标实体间的实体对齐结果,提高了实体对齐的准确性。