
图像对齐方法和装置、电子设备和计算机可读存储介质.pdf

书生****萌哒

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
图像对齐方法和装置、电子设备和计算机可读存储介质.pdf
本申请涉及图像处理技术领域,具体涉及一种图像对齐方法和图像对齐装置,以及电子设备和计算机可读存储介质,解决了现有图像对齐方法对齐准确性差的问题。本申请实施例提供的图像对齐方法,基于飞行器中的图像采集装置的地理位置信息和图像采集装置采集的目标场景图像,确定了图像采集装置对应的深度图,从而为飞行器中的不同波段的多个相机提供了真实的深度数据,使多个相机各自采集的图像可以根据真实的深度数据进行图像对齐,与现有技术中假设深度数据为一个固定且统一的数值的方法相比,本申请大大提高了图像对齐的准确性。
图像对齐方法和装置、计算机可读存储介质.pdf
本公开提供了一种图像对齐方法和装置、以及计算机可读存储介质。所述图像对齐方法,包括:获取待对齐的图像;将所述待对齐的图像划分为多个第一区域,并分别对所述多个第一区域进行对齐处理,得到对齐后的图像。
图像对齐方法及装置、计算机可读存储介质及电子设备.pdf
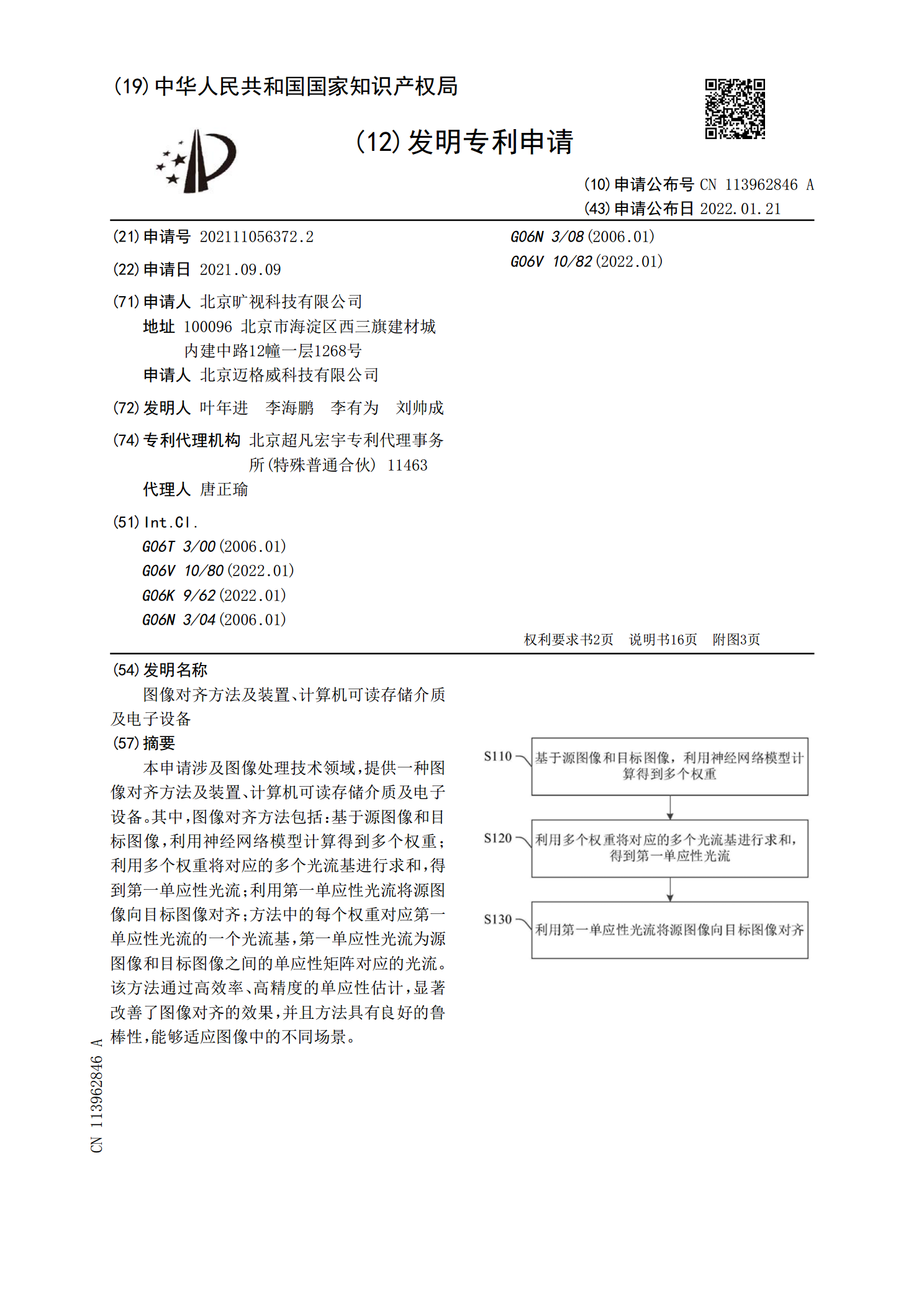
本申请涉及图像处理技术领域,提供一种图像对齐方法及装置、计算机可读存储介质及电子设备。其中,图像对齐方法包括:基于源图像和目标图像,利用神经网络模型计算得到多个权重;利用多个权重将对应的多个光流基进行求和,得到第一单应性光流;利用第一单应性光流将源图像向目标图像对齐;方法中的每个权重对应第一单应性光流的一个光流基,第一单应性光流为源图像和目标图像之间的单应性矩阵对应的光流。该方法通过高效率、高精度的单应性估计,显著改善了图像对齐的效果,并且方法具有良好的鲁棒性,能够适应图像中的不同场景。
图像重建方法和装置、计算机可读存储介质和电子设备.pdf
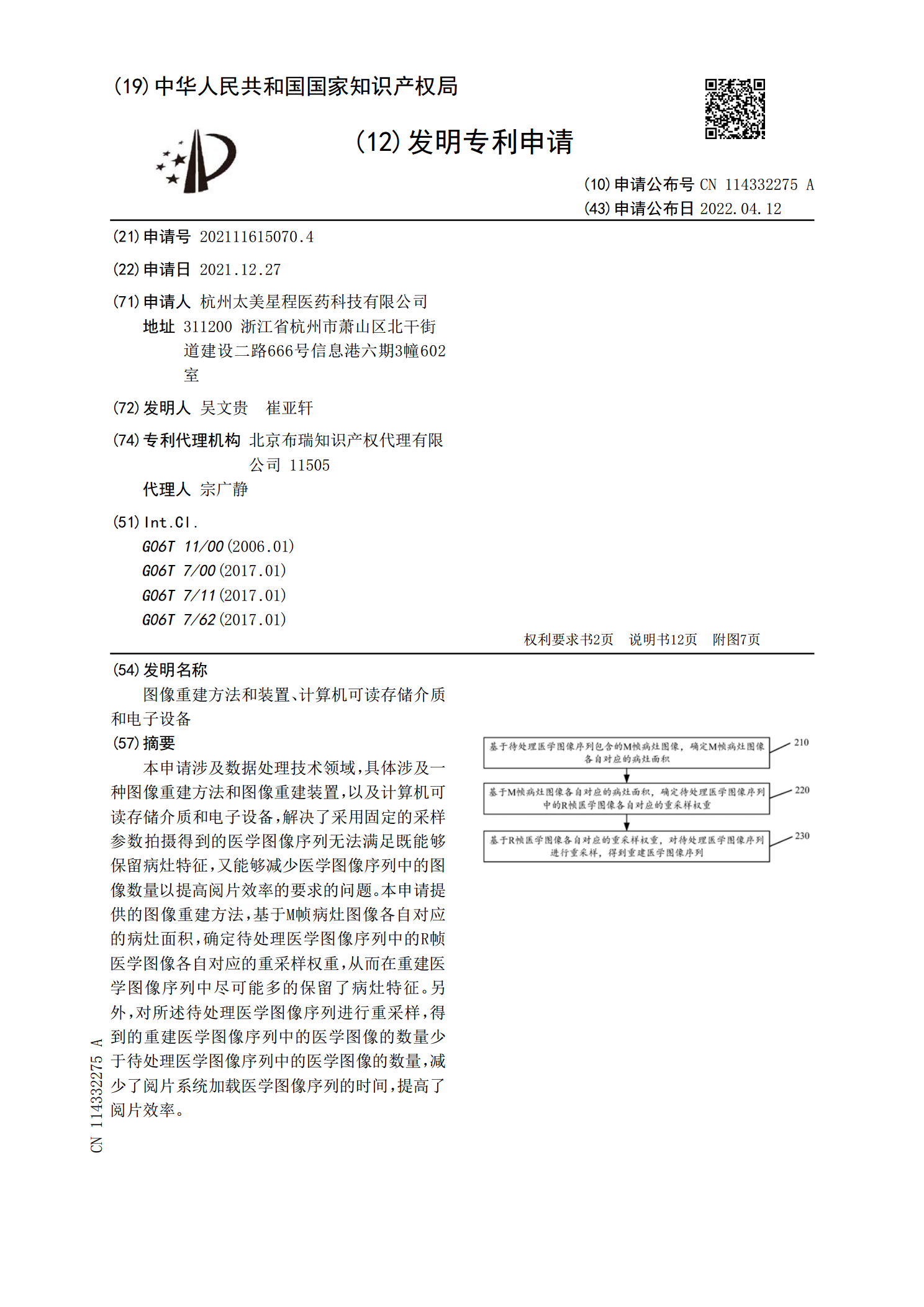
本申请涉及数据处理技术领域,具体涉及一种图像重建方法和图像重建装置,以及计算机可读存储介质和电子设备,解决了采用固定的采样参数拍摄得到的医学图像序列无法满足既能够保留病灶特征,又能够减少医学图像序列中的图像数量以提高阅片效率的要求的问题。本申请提供的图像重建方法,基于M帧病灶图像各自对应的病灶面积,确定待处理医学图像序列中的R帧医学图像各自对应的重采样权重,从而在重建医学图像序列中尽可能多的保留了病灶特征。另外,对所述待处理医学图像序列进行重采样,得到的重建医学图像序列中的医学图像的数量少于待处理医学图像
图像处理方法和装置、计算机可读存储介质和电子设备.pdf
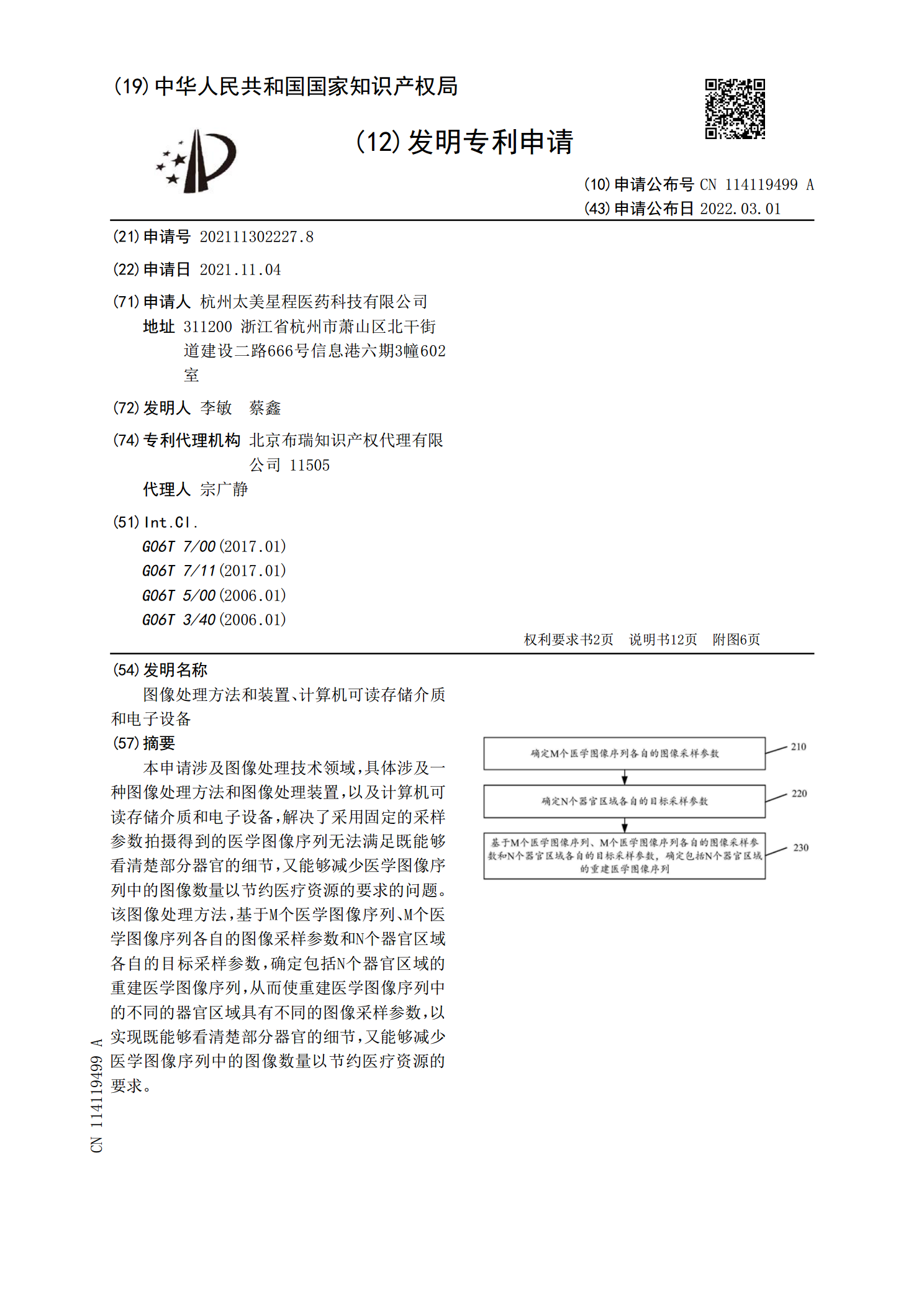
本申请涉及图像处理技术领域,具体涉及一种图像处理方法和图像处理装置,以及计算机可读存储介质和电子设备,解决了采用固定的采样参数拍摄得到的医学图像序列无法满足既能够看清楚部分器官的细节,又能够减少医学图像序列中的图像数量以节约医疗资源的要求的问题。该图像处理方法,基于M个医学图像序列、M个医学图像序列各自的图像采样参数和N个器官区域各自的目标采样参数,确定包括N个器官区域的重建医学图像序列,从而使重建医学图像序列中的不同的器官区域具有不同的图像采样参数,以实现既能够看清楚部分器官的细节,又能够减少医学图像序