
长度损失确定方法以及装置.pdf

是立****92

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
长度损失确定方法以及装置.pdf
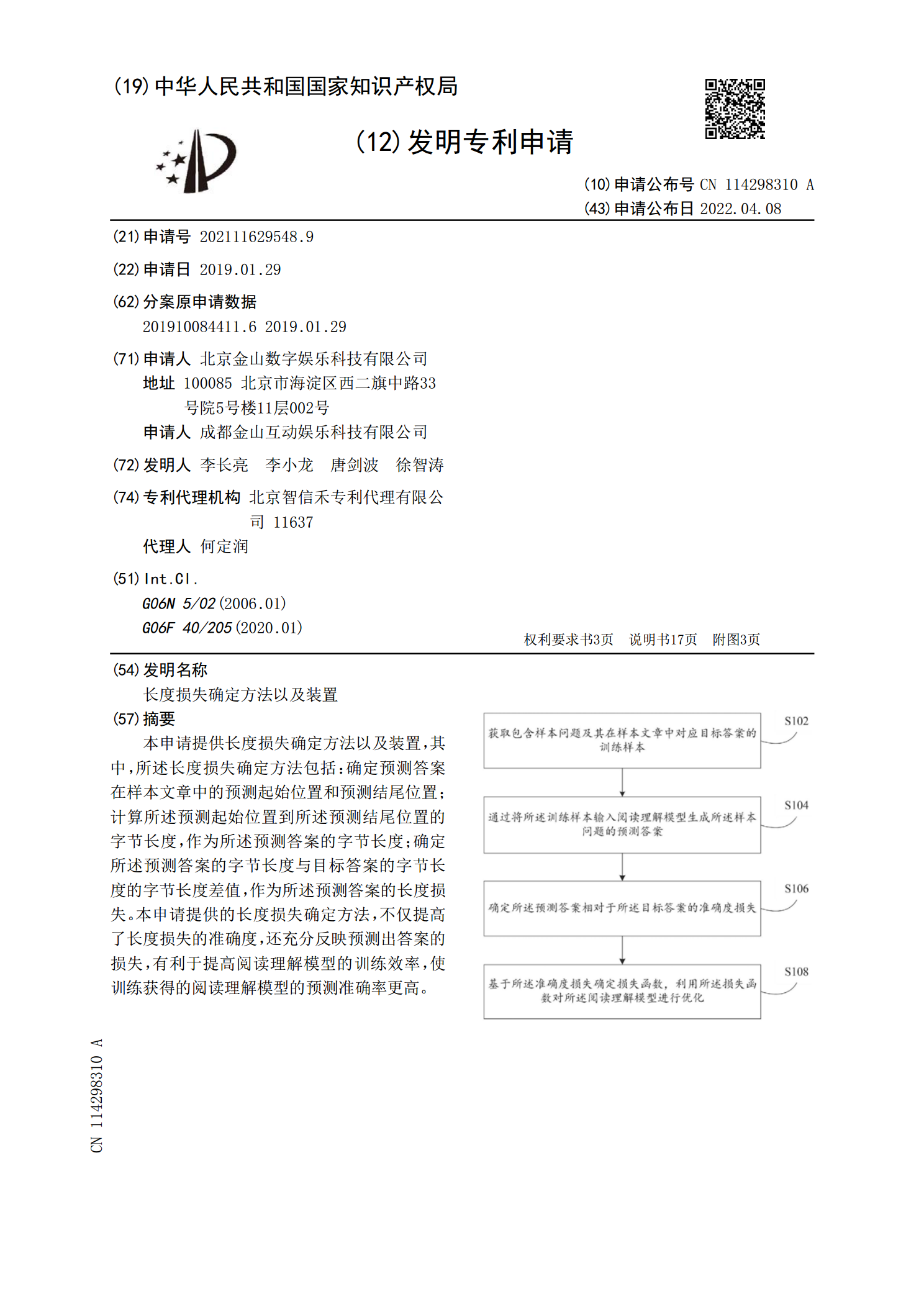
本申请提供长度损失确定方法以及装置,其中,所述长度损失确定方法包括:确定预测答案在样本文章中的预测起始位置和预测结尾位置;计算所述预测起始位置到所述预测结尾位置的字节长度,作为所述预测答案的字节长度;确定所述预测答案的字节长度与目标答案的字节长度的字节长度差值,作为所述预测答案的长度损失。本申请提供的长度损失确定方法,不仅提高了长度损失的准确度,还充分反映预测出答案的损失,有利于提高阅读理解模型的训练效率,使训练获得的阅读理解模型的预测准确率更高。

准确度损失确定方法以及装置.pdf
本申请提供准确度损失确定方法以及装置,其中,所述准确度损失确定方法包括:确定预测答案在样本文章中预测起始位置和预测结尾位置的位置损失;将所述预测答案包含的字单元与目标答案包含的字单元进行比对,确定所述预测答案的语义损失;将所述预测答案与所述目标答案在所述样本文章中进行比对,确定所述预测答案的长度损失;基于所述位置损失、所述语义损失和所述长度损失确定所述预测答案的准确度损失。本申请提供的准确度损失确定方法,不仅提高了准确度损失的准确度,还充分反映出预测答案的损失,从而基于该准确度损失对阅读理解模型的训练过程

确定装置、校正装置、输出装置以及确定方法.pdf
本发明涉及确定装置、校正装置、输出装置以及确定方法。确定装置包括:获取单元,该获取单元获取输出特征,该输出特征表示由校正单元根据预定的校正特征校正的灰度值与由输出装置输出的对应所述灰度值的色调剂图像的浓度的测得值之间的关系;估计单元,当预定的基准灰度值不在校正了的所述灰度值的范围内时,该估计单元估计由所述输出装置输出的对应所述预定的基准灰度值的色调剂图像的浓度,所述估计是基于由所述获取单元获取的所述输出特征执行的;以及确定单元,通过将由所述估计单元估计的所述浓度与预定的阈值进行比较,该确定单元确定是否需要

拍摄盲区的长度确定方法、装置以及计算机设备.pdf
本申请公开了一种拍摄盲区的长度确定方法、装置以及计算机设备,涉及智能交通技术领域。具体实现方案为:通过获取第一摄像头和第二摄像头同步采集的初始图像帧;根据第一摄像头采集的初始图像帧,确定可视区域的边界;从第二摄像头采集的初始图像帧中,确定目标车辆;根据第一摄像头后续采集的图像帧,监测目标车辆行驶至边界位置之前,边界位置通过的各行驶车辆;根据各行驶车辆,确定第一摄像头和第二摄像头的拍摄盲区长度。该方法通过目标车辆行驶至可视区域的边界位置之前,边界位置通过的各行驶车辆确定第一摄像头和第二摄像头的拍摄盲区长度,

分道确定方法以及分道确定装置.pdf
高精度地确定图像中存在的分道的区域。在存在分道确定装置(100)、摄像装置(200)以及游泳池(300)的状况下,本公开中的分道确定装置(100)的处理器根据基于由摄像装置(200)拍摄得到的图像中的物体的轮廓获得的信息在图像中所呈现的图案来确定图像中存在的分道的区域。由此,能够高精度地确定图像中存在的分道的区域。