
拍摄盲区的长度确定方法、装置以及计算机设备.pdf

韶敏****ab

1/10

2/10
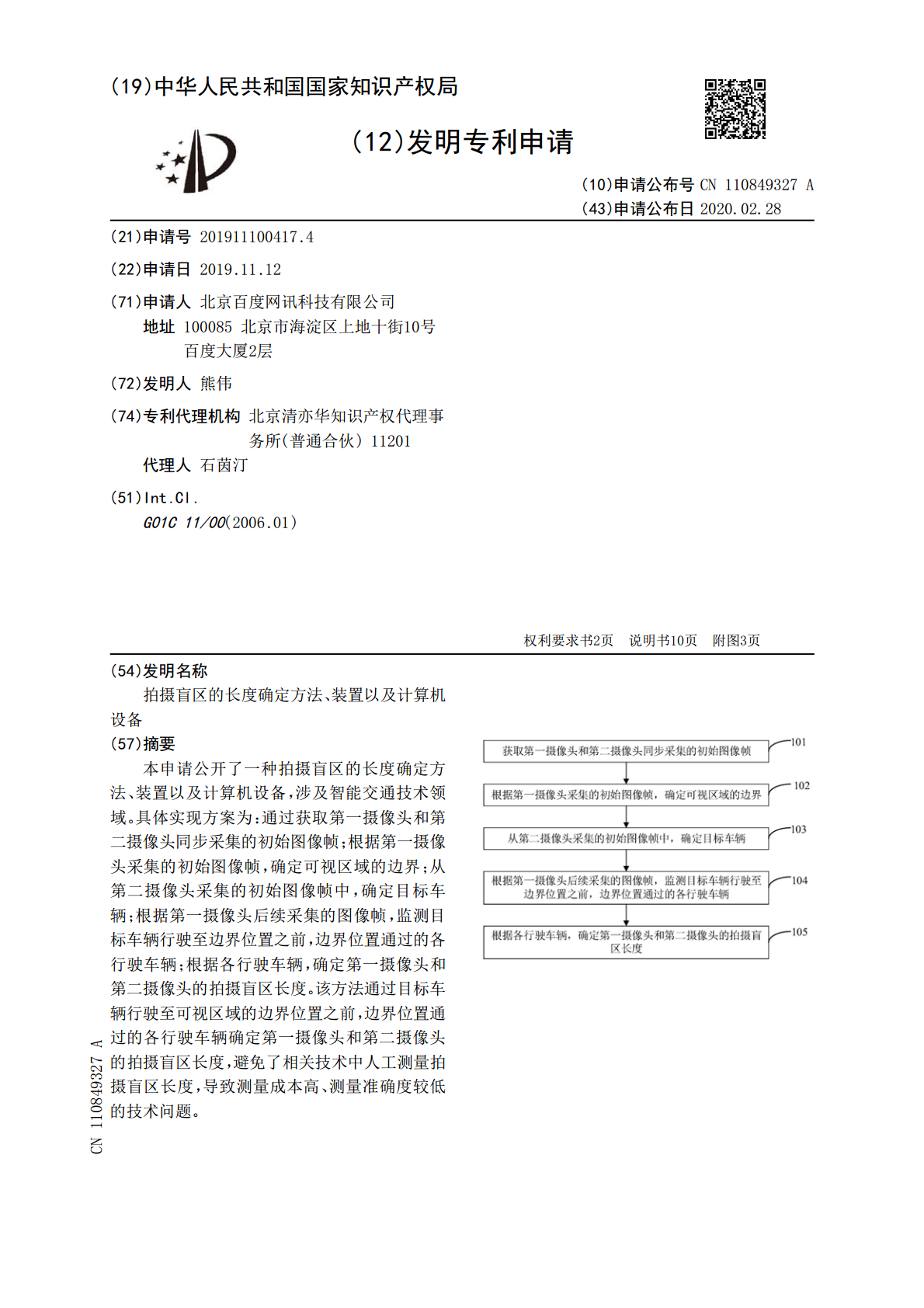
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

拍摄盲区的长度确定方法、装置以及计算机设备.pdf
本申请公开了一种拍摄盲区的长度确定方法、装置以及计算机设备,涉及智能交通技术领域。具体实现方案为:通过获取第一摄像头和第二摄像头同步采集的初始图像帧;根据第一摄像头采集的初始图像帧,确定可视区域的边界;从第二摄像头采集的初始图像帧中,确定目标车辆;根据第一摄像头后续采集的图像帧,监测目标车辆行驶至边界位置之前,边界位置通过的各行驶车辆;根据各行驶车辆,确定第一摄像头和第二摄像头的拍摄盲区长度。该方法通过目标车辆行驶至可视区域的边界位置之前,边界位置通过的各行驶车辆确定第一摄像头和第二摄像头的拍摄盲区长度,
长度损失确定方法以及装置.pdf
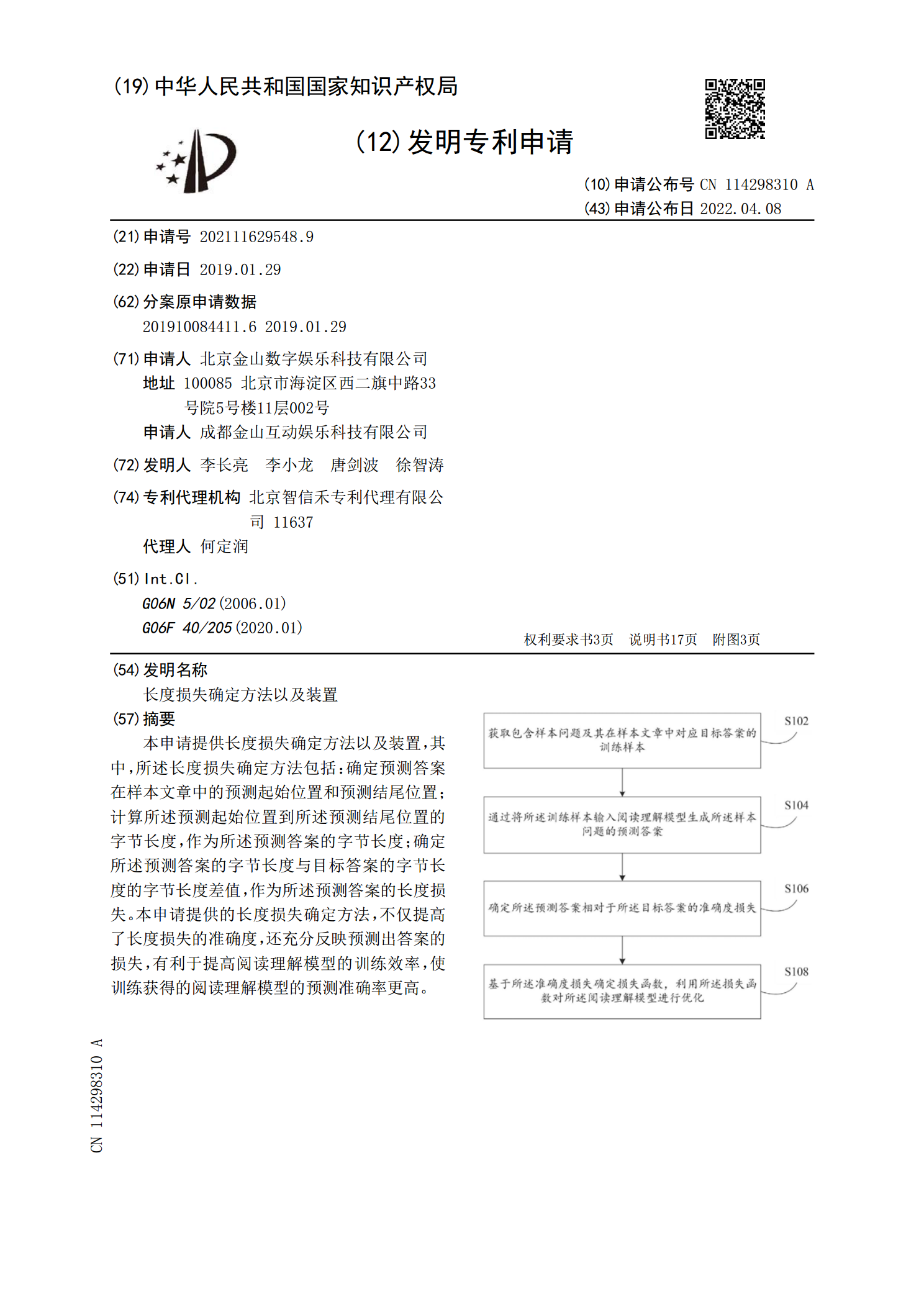
本申请提供长度损失确定方法以及装置,其中,所述长度损失确定方法包括:确定预测答案在样本文章中的预测起始位置和预测结尾位置;计算所述预测起始位置到所述预测结尾位置的字节长度,作为所述预测答案的字节长度;确定所述预测答案的字节长度与目标答案的字节长度的字节长度差值,作为所述预测答案的长度损失。本申请提供的长度损失确定方法,不仅提高了长度损失的准确度,还充分反映预测出答案的损失,有利于提高阅读理解模型的训练效率,使训练获得的阅读理解模型的预测准确率更高。

拍摄方法以及拍摄装置.pdf
本发明提供一种拍摄方法以及拍摄装置,包括:确定拍摄的设定位置;设置在设定位置进行拍摄的设定条件;当判断到满足设定条件时,在设定位置进行拍摄。本发明能够在设定位置按照设定条件自动收集事物,从而不会错失拍摄良机,方便用户拍摄,并且增加拍摄的娱乐性和趣味性。

拍摄方法以及拍摄装置.pdf
本申请提供一种拍摄方法以及拍摄装置,拍摄方法包括:判断是否满足预设条件,当满足预设条件时,触发拍摄获取拍摄图像;判断拍摄图像中是否包含预设的保护动物的图像画面;如果拍摄图像中包含预设的保护动物的图像画面,则将拍摄图像按照设定方式进行图像处理,以使所述保护动物在所述拍摄图像中不被显示。本申请能够避免拍摄装置被不法分子利用来进行捕猎,危及保护动物的生命安全,给国家和人民造成损失。
互动方法、装置、设备以及通信方法、拍摄方法.pdf
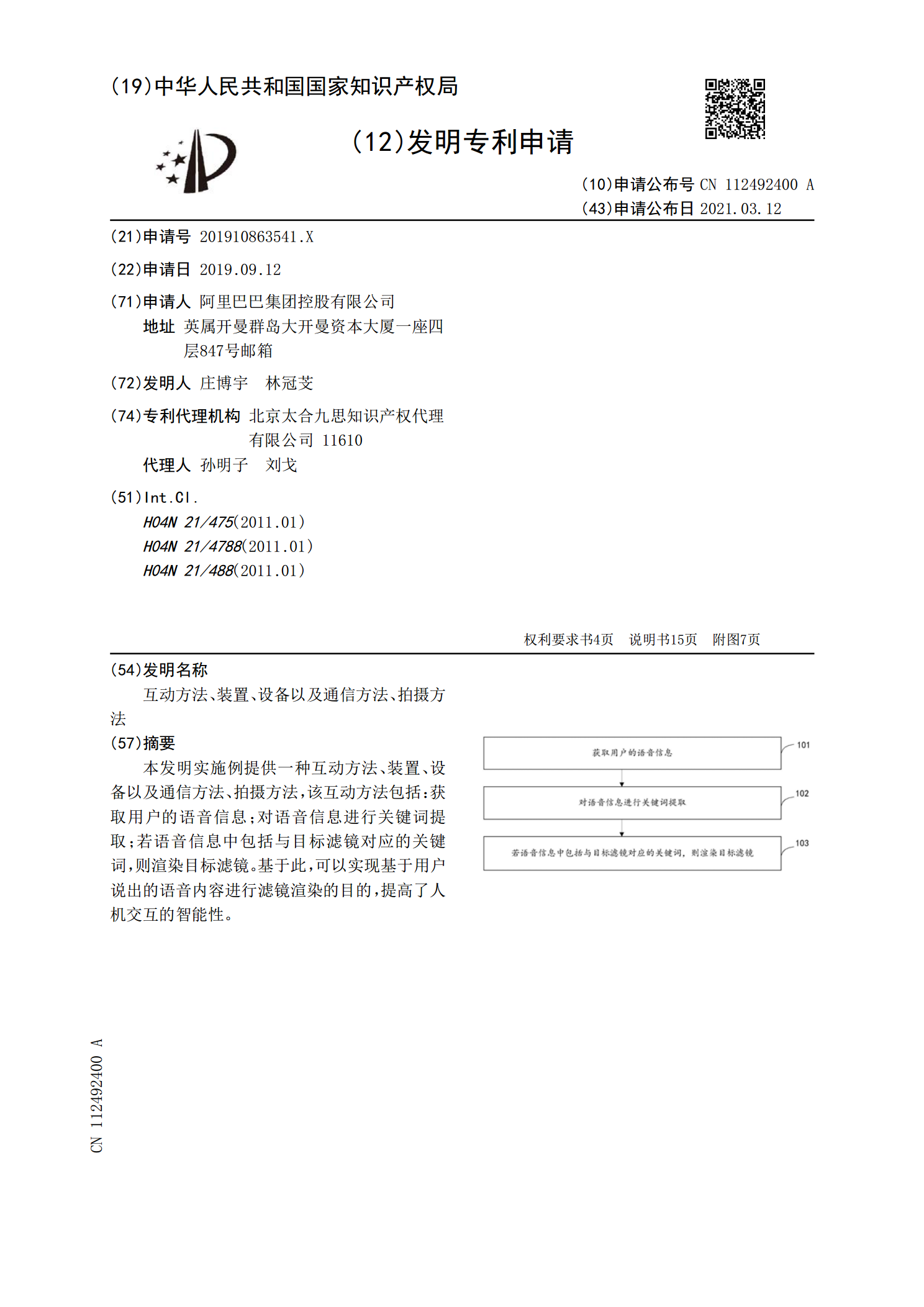
本发明实施例提供一种互动方法、装置、设备以及通信方法、拍摄方法,该互动方法包括:获取用户的语音信息;对语音信息进行关键词提取;若语音信息中包括与目标滤镜对应的关键词,则渲染目标滤镜。基于此,可以实现基于用户说出的语音内容进行滤镜渲染的目的,提高了人机交互的智能性。