
车辆控制方法、装置及计算机可读存储介质.pdf

fu****级甜

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆控制方法、装置及计算机可读存储介质.pdf
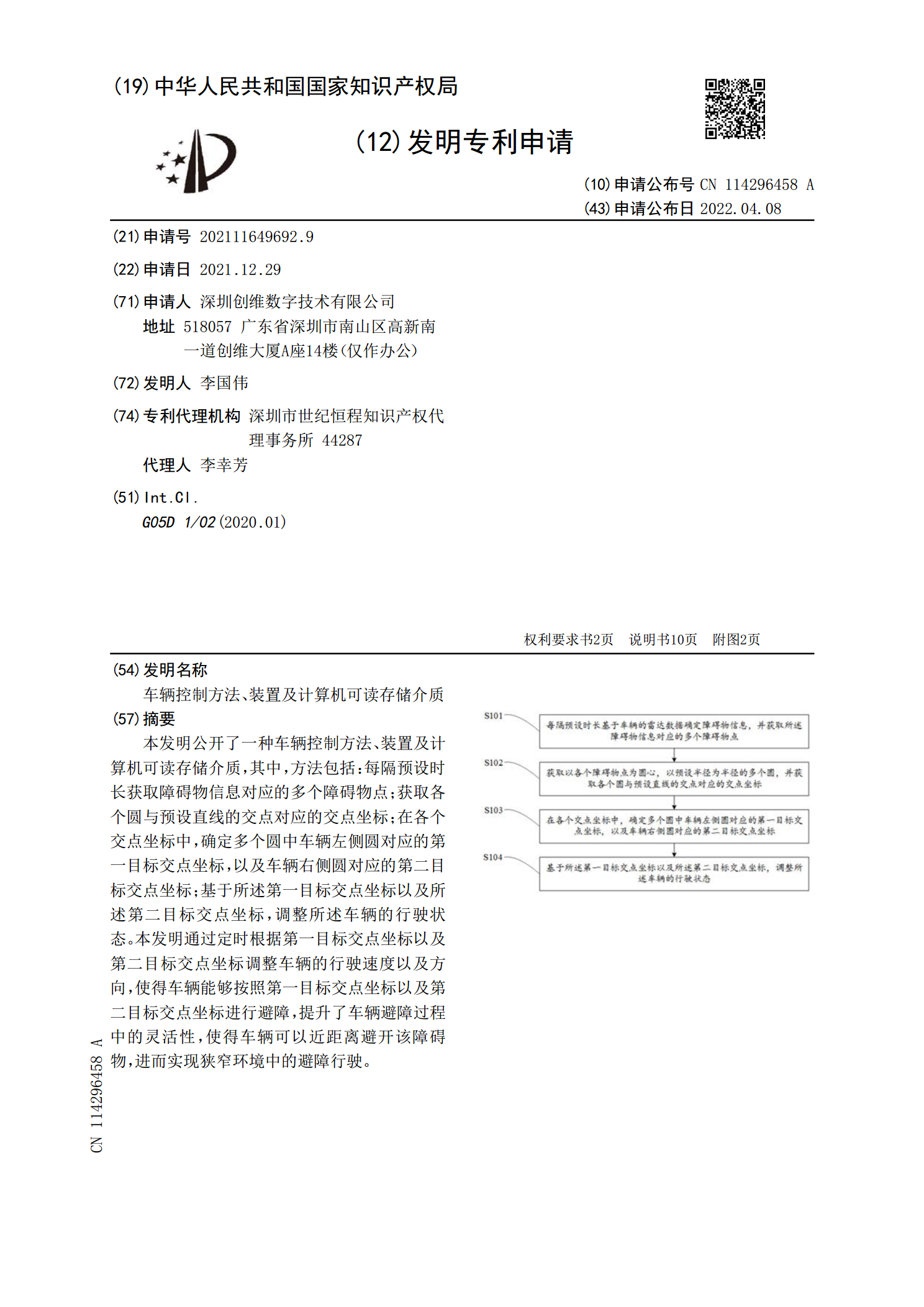
本发明公开了一种车辆控制方法、装置及计算机可读存储介质,其中,方法包括:每隔预设时长获取障碍物信息对应的多个障碍物点;获取各个圆与预设直线的交点对应的交点坐标;在各个交点坐标中,确定多个圆中车辆左侧圆对应的第一目标交点坐标,以及车辆右侧圆对应的第二目标交点坐标;基于所述第一目标交点坐标以及所述第二目标交点坐标,调整所述车辆的行驶状态。本发明通过定时根据第一目标交点坐标以及第二目标交点坐标调整车辆的行驶速度以及方向,使得车辆能够按照第一目标交点坐标以及第二目标交点坐标进行避障,提升了车辆避障过程中的灵活性,

车辆出库控制方法及装置、计算机可读存储介质.pdf
一种车辆出库控制方法及装置、计算机可读存储介质,所述车辆出库控制方法包括以下步骤:获取挪车请求;基于所述挪车请求,获取所述遮挡车辆的挪车授权信息;以及基于所述挪车授权信息,执行挪车操作。上述方案,能够加快车辆驶出停车场的,提高停车场的车位使用效率。
车辆扭矩控制方法、装置及计算机可读存储介质.pdf
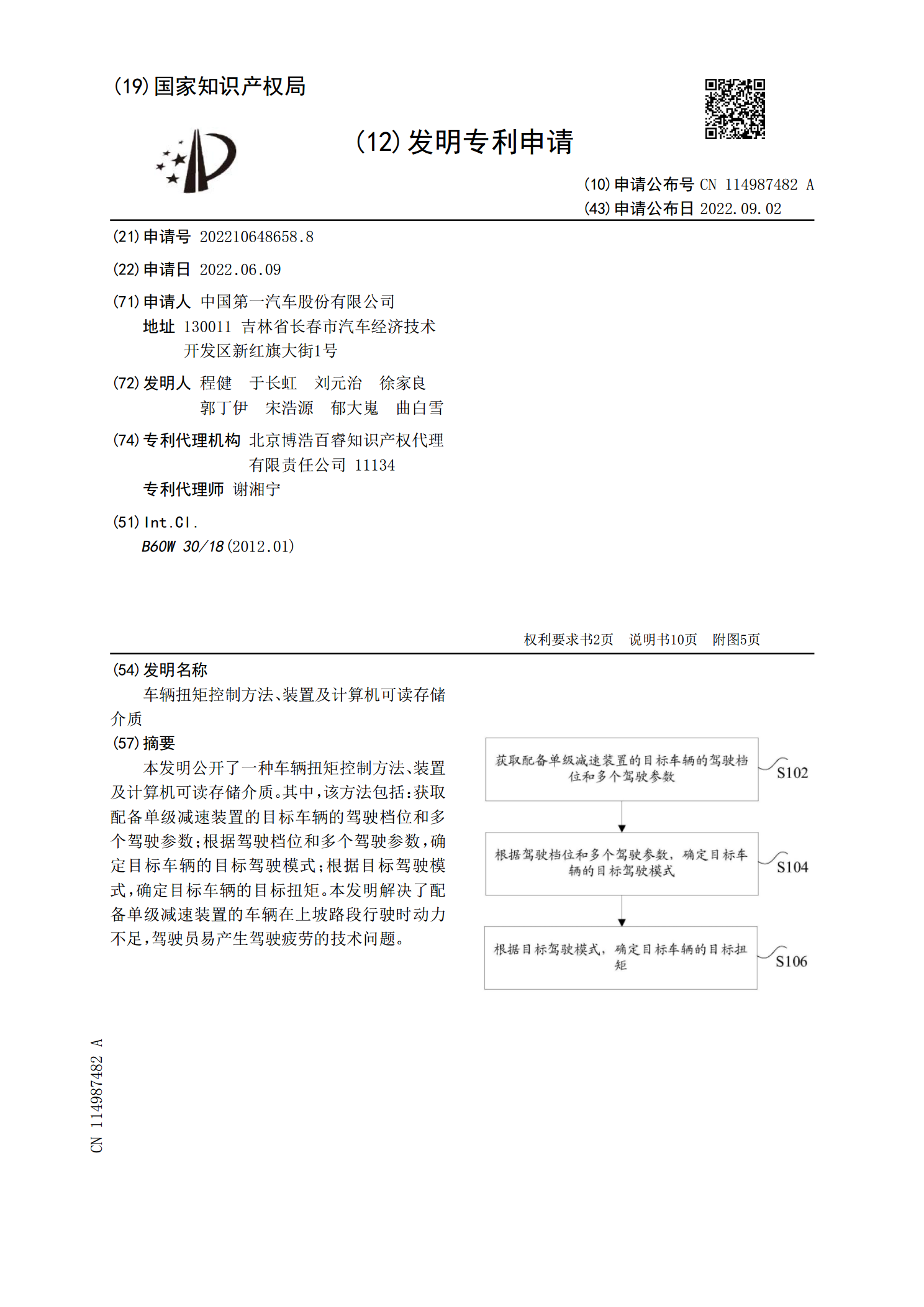
本发明公开了一种车辆扭矩控制方法、装置及计算机可读存储介质。其中,该方法包括:获取配备单级减速装置的目标车辆的驾驶档位和多个驾驶参数;根据驾驶档位和多个驾驶参数,确定目标车辆的目标驾驶模式;根据目标驾驶模式,确定目标车辆的目标扭矩。本发明解决了配备单级减速装置的车辆在上坡路段行驶时动力不足,驾驶员易产生驾驶疲劳的技术问题。
车辆的控制方法、控制装置、车辆和计算机可读存储介质.pdf
本发明提供了一种车辆的控制方法、控制装置、车辆和计算机可读存储介质,其中,车辆的控制方法包括:确定车辆的目标支撑位置;检测目标支撑位置处的地表的工况参数,并根据目标支撑位置和工况参数生成支撑提示信息;对支撑提示信息进行输出。本方案提供的车辆的控制方法,可以实现车辆在行驶过程中通过目标支撑位置检测目标支撑位置处的地表的工况参数,通过支撑提示信息确定当前地表是否适于停车以及是否适于展开支腿,避免了由于地面凹凸不平导致支腿无法稳定的支撑车辆的情形,提升了支腿支撑的稳定性,进而提升了整车的稳定性,且避免了反复控制
车辆的控制方法、装置、车辆及计算机可读存储介质.pdf
本发明公开了一种车辆的控制方法、装置、车辆及计算机可读存储介质,该车辆的后桥总成包括含有油液的后桥壳体及用于检测后桥壳体内部状态的传感器,该车辆的控制方法包括以下步骤:获取车辆的行驶状态信号及传感器传输的后桥壳体内部状态信号;根据行驶状态信号和后桥壳体内部状态信号,控制车辆发出报警信号和/或控制车辆的行驶状态。本发明能够通过设置于后桥总成上的传感器来简单、快捷、准确地检测后桥壳体内部状态,省时省力且成本低,并结合车辆的行驶状态对车辆进行控制,可有效避免因后桥壳体内油液异常而造成的整桥报废,齿轮、轴承损坏,