
风险阈值确定方法、装置、设备以及存储介质.pdf

猫巷****晓容

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共30页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
风险阈值确定方法、装置、设备以及存储介质.pdf
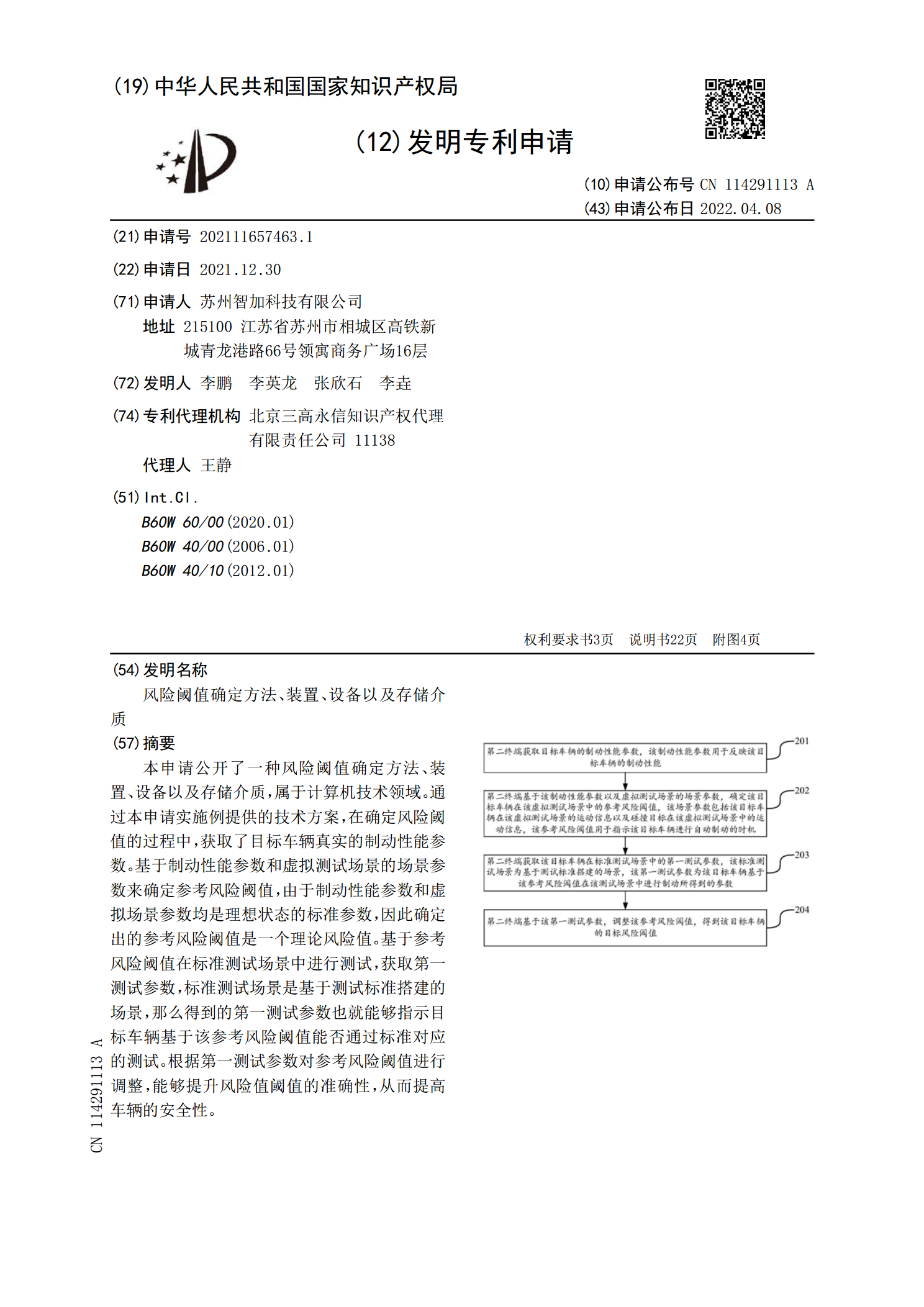
本申请公开了一种风险阈值确定方法、装置、设备以及存储介质,属于计算机技术领域。通过本申请实施例提供的技术方案,在确定风险阈值的过程中,获取了目标车辆真实的制动性能参数。基于制动性能参数和虚拟测试场景的场景参数来确定参考风险阈值,由于制动性能参数和虚拟场景参数均是理想状态的标准参数,因此确定出的参考风险阈值是一个理论风险值。基于参考风险阈值在标准测试场景中进行测试,获取第一测试参数,标准测试场景是基于测试标准搭建的场景,那么得到的第一测试参数也就能够指示目标车辆基于该参考风险阈值能否通过标准对应的测试。根据
相似度阈值确定方法、装置、设备和存储介质.pdf
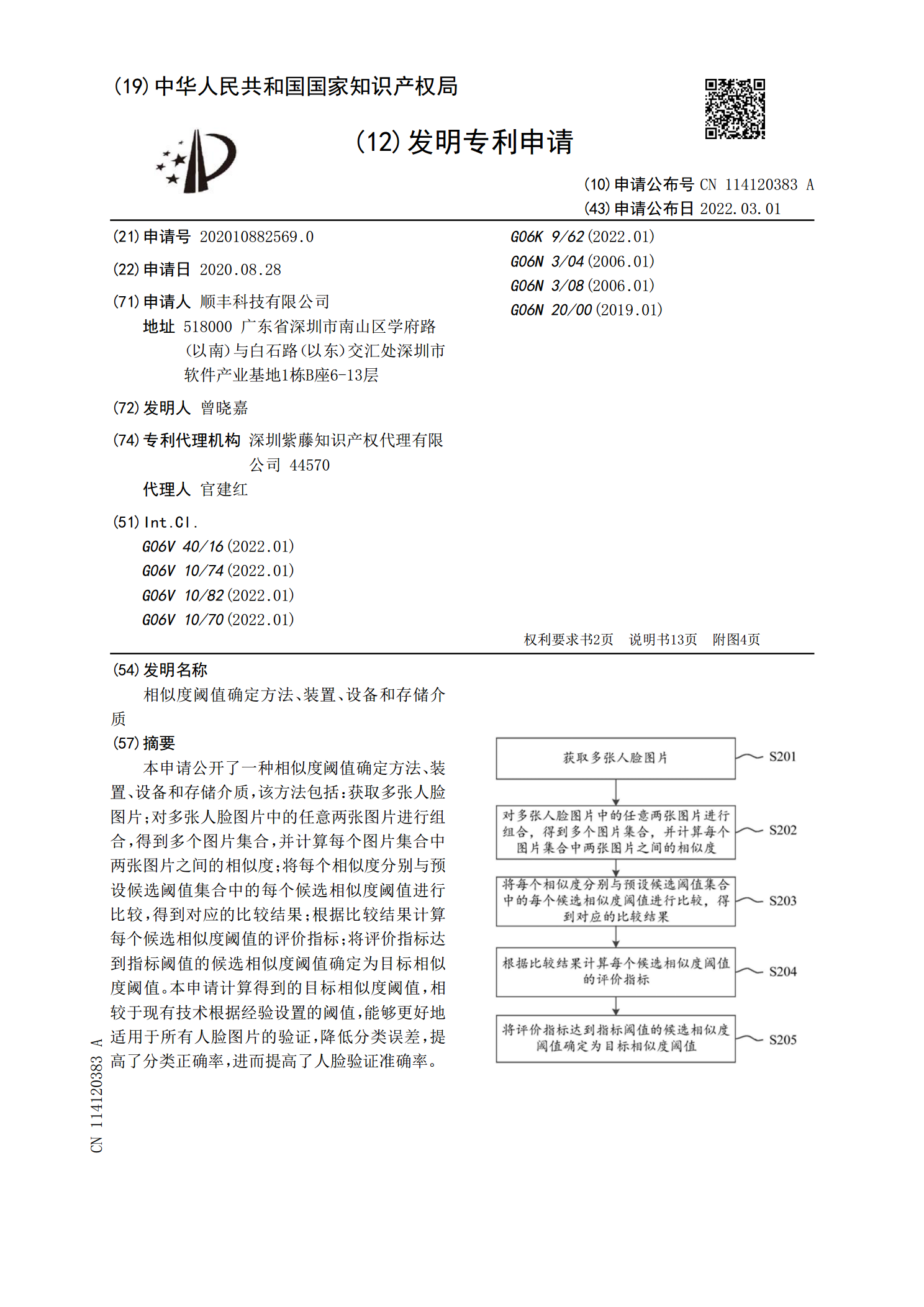
本申请公开了一种相似度阈值确定方法、装置、设备和存储介质,该方法包括:获取多张人脸图片;对多张人脸图片中的任意两张图片进行组合,得到多个图片集合,并计算每个图片集合中两张图片之间的相似度;将每个相似度分别与预设候选阈值集合中的每个候选相似度阈值进行比较,得到对应的比较结果;根据比较结果计算每个候选相似度阈值的评价指标;将评价指标达到指标阈值的候选相似度阈值确定为目标相似度阈值。本申请计算得到的目标相似度阈值,相较于现有技术根据经验设置的阈值,能够更好地适用于所有人脸图片的验证,降低分类误差,提高了分类正确
地图确定方法、装置、设备以及存储介质.pdf
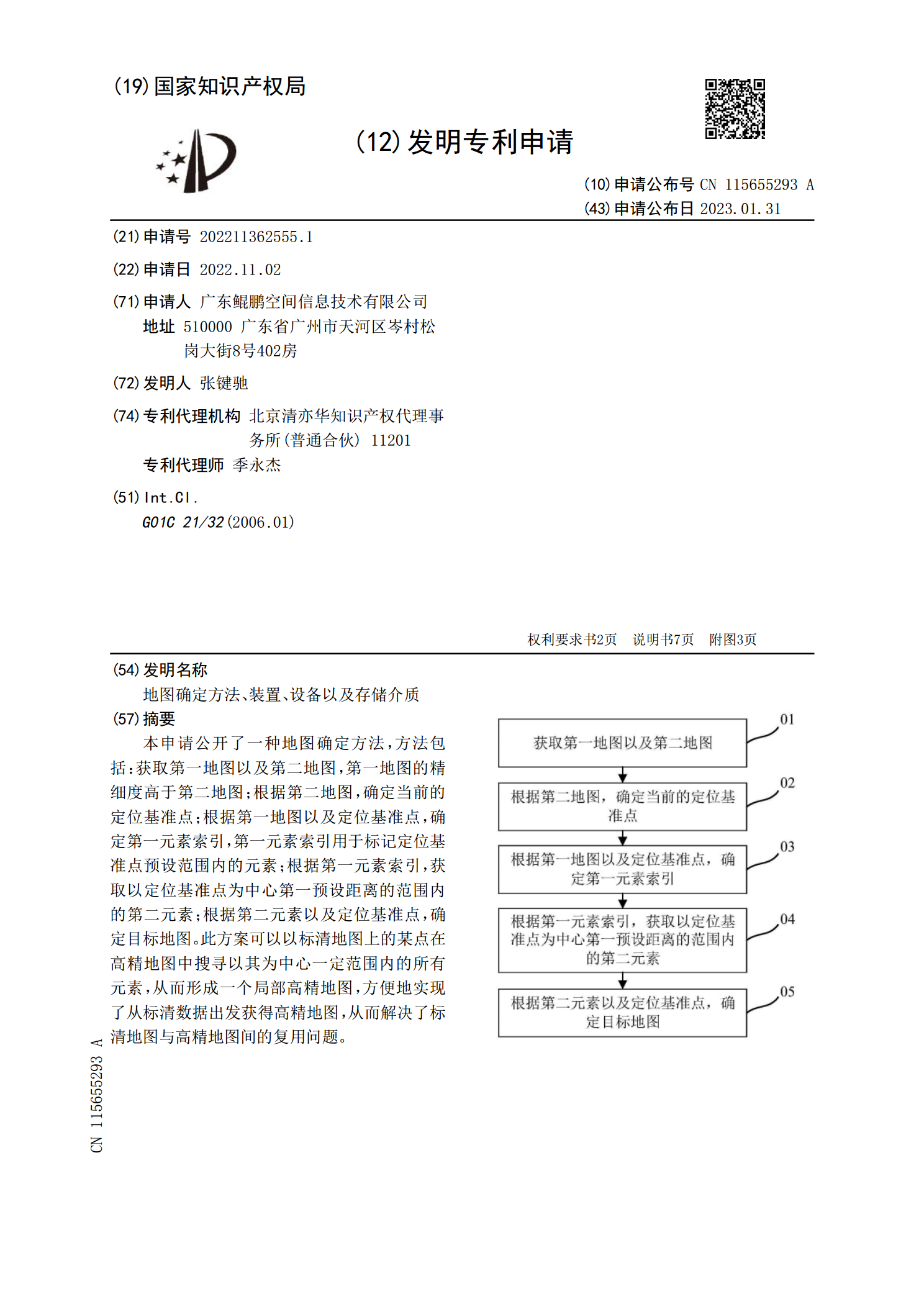
本申请公开了一种地图确定方法,方法包括:获取第一地图以及第二地图,第一地图的精细度高于第二地图;根据第二地图,确定当前的定位基准点;根据第一地图以及定位基准点,确定第一元素索引,第一元素索引用于标记定位基准点预设范围内的元素;根据第一元素索引,获取以定位基准点为中心第一预设距离的范围内的第二元素;根据第二元素以及定位基准点,确定目标地图。此方案可以以标清地图上的某点在高精地图中搜寻以其为中心一定范围内的所有元素,从而形成一个局部高精地图,方便地实现了从标清数据出发获得高精地图,从而解决了标清地图与高精地图
确定方法、装置、电子设备以及存储介质.pdf
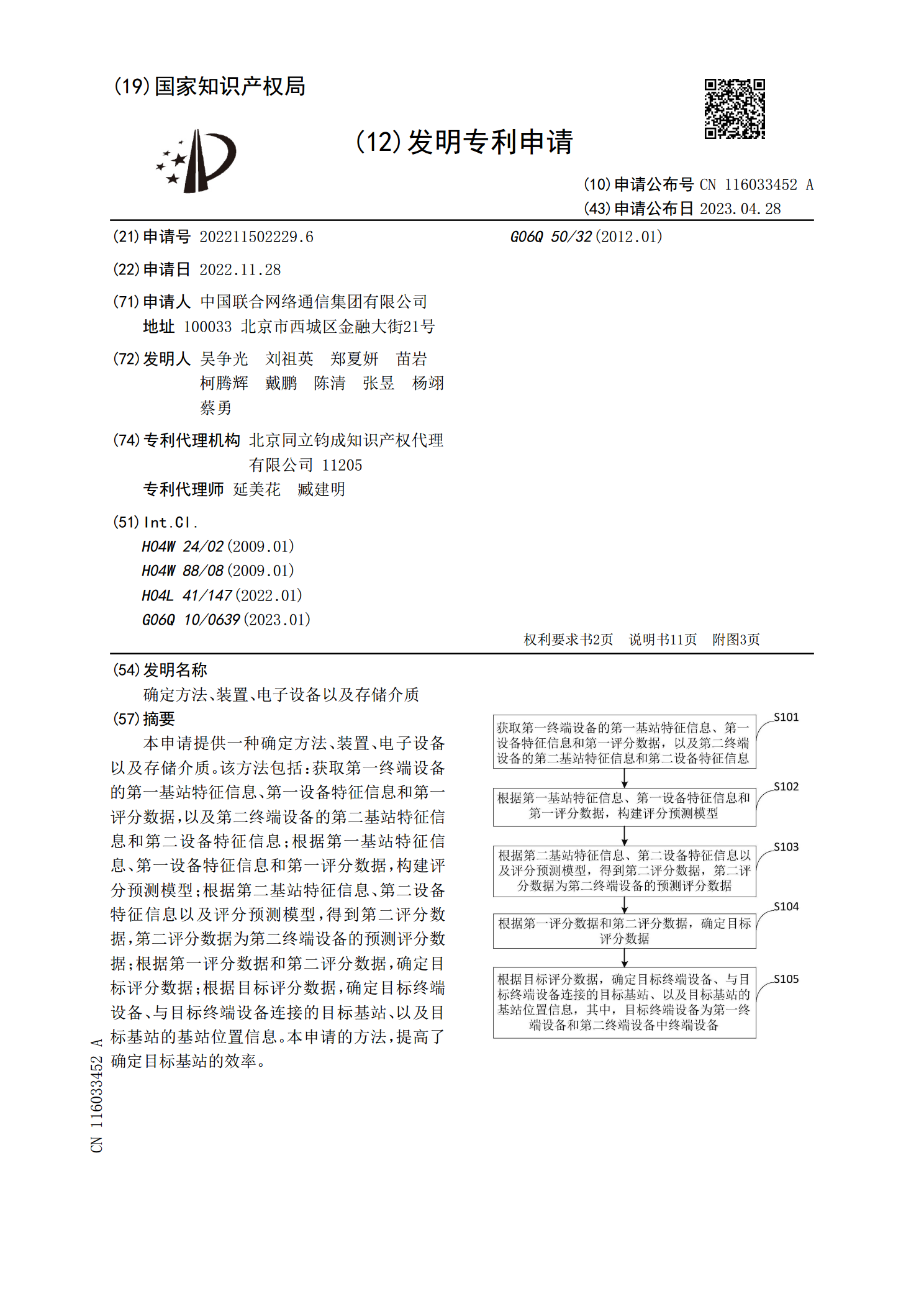
本申请提供一种确定方法、装置、电子设备以及存储介质。该方法包括:获取第一终端设备的第一基站特征信息、第一设备特征信息和第一评分数据,以及第二终端设备的第二基站特征信息和第二设备特征信息;根据第一基站特征信息、第一设备特征信息和第一评分数据,构建评分预测模型;根据第二基站特征信息、第二设备特征信息以及评分预测模型,得到第二评分数据,第二评分数据为第二终端设备的预测评分数据;根据第一评分数据和第二评分数据,确定目标评分数据;根据目标评分数据,确定目标终端设备、与目标终端设备连接的目标基站、以及目标基站的基站位
搜索意图确定方法、装置、设备以及存储介质.pdf
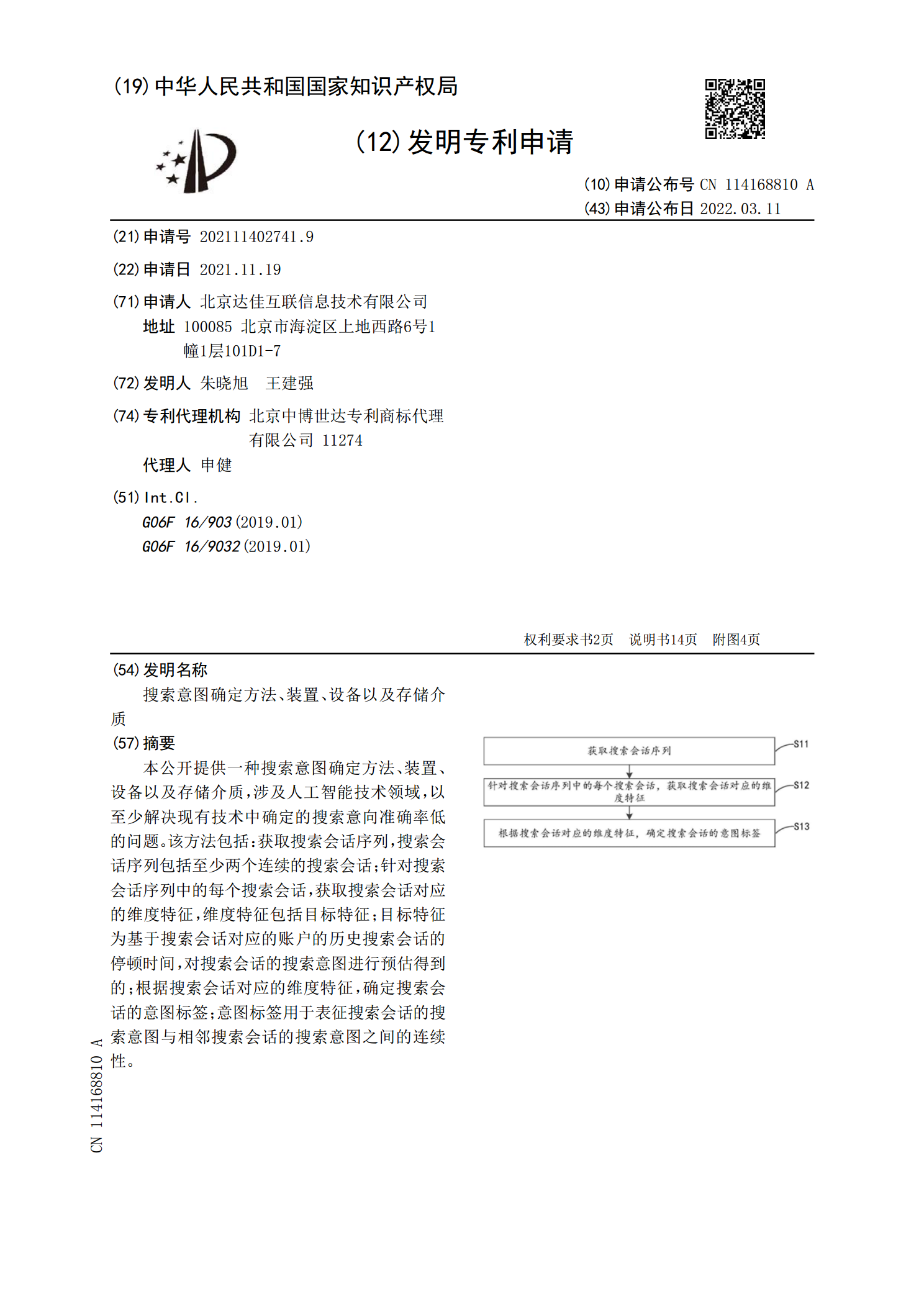
本公开提供一种搜索意图确定方法、装置、设备以及存储介质,涉及人工智能技术领域,以至少解决现有技术中确定的搜索意向准确率低的问题。该方法包括:获取搜索会话序列,搜索会话序列包括至少两个连续的搜索会话;针对搜索会话序列中的每个搜索会话,获取搜索会话对应的维度特征,维度特征包括目标特征;目标特征为基于搜索会话对应的账户的历史搜索会话的停顿时间,对搜索会话的搜索意图进行预估得到的;根据搜索会话对应的维度特征,确定搜索会话的意图标签;意图标签用于表征搜索会话的搜索意图与相邻搜索会话的搜索意图之间的连续性。