
一种红外图像导引头自适应抗干扰方法及装置.pdf

佳晨****ng


1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种红外图像导引头自适应抗干扰方法及装置.pdf
本发明公开了一种红外图像导引头自适应抗干扰方法及装置,该红外图像导引头自适应抗干扰方法包括:在没有干扰时,获得目标的模拟运动轨迹和辐射强度;当出现干扰时,执行以下操作:排除掉疑似目标的辐射强度与目标的辐射强度之差超过第一预设值的疑似目标以及辐射强度下降速度超过第二预设值的疑似目标;排除掉疑似目标的实时运动轨迹与目标的模拟运动轨迹之间的偏离角度大于第三预设值的疑似目标;判断第二剩余疑似目标中是否包括至少2个疑似目标,如果是,则启动智能识别模式,并基于智能识别模式,在第二剩余疑似目标中确定真实目标,否则将第二
一种自适应聚类的红外图像增强方法.pdf
本发明揭示了一种自适应聚类的红外图像增强方法,利用高频感知滤波计算操作,计算图像结构层信息和对应的图像纹理层信息,利用协方差矩阵特征图及加权共现矩阵特征图来编码目标内部结构成份和抑制背景噪声成份,同时,利用协方差矩阵特征图约束共现矩阵特征图来保留重要的高频细节信息,最终得到增强效果图。本发明利用高频感知滤波计算获得图像结构层信息,在已知输入图像和图像结构层信息基础上,获得图像的纹理信息,并利用协方差矩阵和共现矩阵保留较多的纹理细节,最后对结构层图像和纹理图像中重要的像素进行融合聚类,达到自适应分配背景和前
一种红外图像处理的方法及装置.pdf
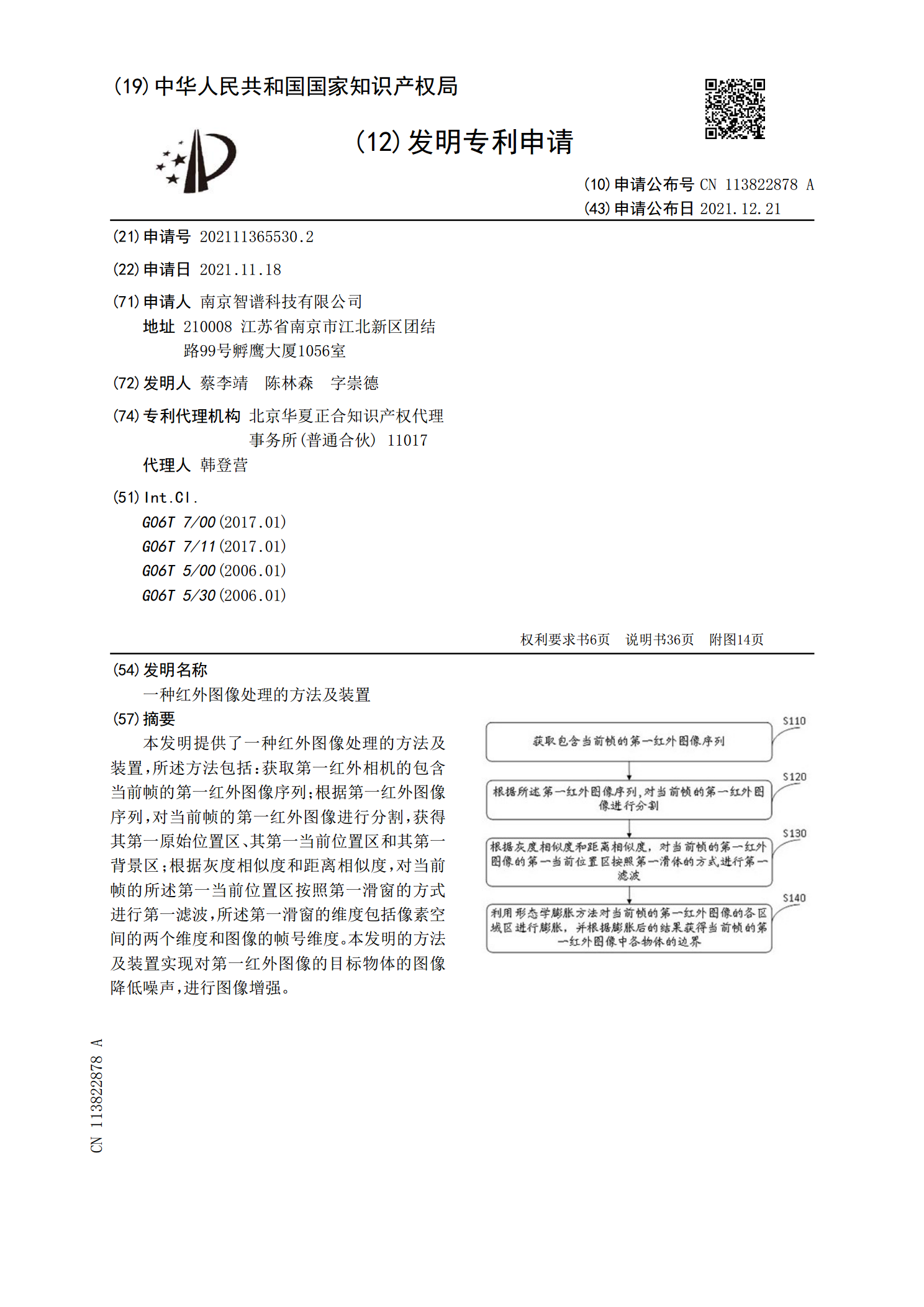
本发明提供了一种红外图像处理的方法及装置,所述方法包括:获取第一红外相机的包含当前帧的第一红外图像序列;根据第一红外图像序列,对当前帧的第一红外图像进行分割,获得其第一原始位置区、其第一当前位置区和其第一背景区;根据灰度相似度和距离相似度,对当前帧的所述第一当前位置区按照第一滑窗的方式进行第一滤波,所述第一滑窗的维度包括像素空间的两个维度和图像的帧号维度。本发明的方法及装置实现对第一红外图像的目标物体的图像降低噪声,进行图像增强。

一种红外图像细节增强方法和一种红外图像细节增强装置.pdf
本发明涉及一种红外图像细节增强方法和一种红外图像细节增强装置,利用SOC架构中的ARM实现对采集到的图像数据依次进行滤波处理和灰度处理,得到第一处理图像;对第一处理图像依次进行对比度处理和进行直方图插值处理,得到第二处理图像;利用SOC架构中的GPU对第二处理图像进行锐化处理,得到第三处理图像;将第三处理图像与第一处理图像进行融合处理,处理后的图像数据即是得到图像细节增强处理后的红外图像。最大程度保留红外图像的细节,图像对比度高,局部细节清晰;而且让设备操作员在温度变化十分显著的场景中,也能够看清红外图像
红外信号抗干扰方法、装置及显示设备.pdf
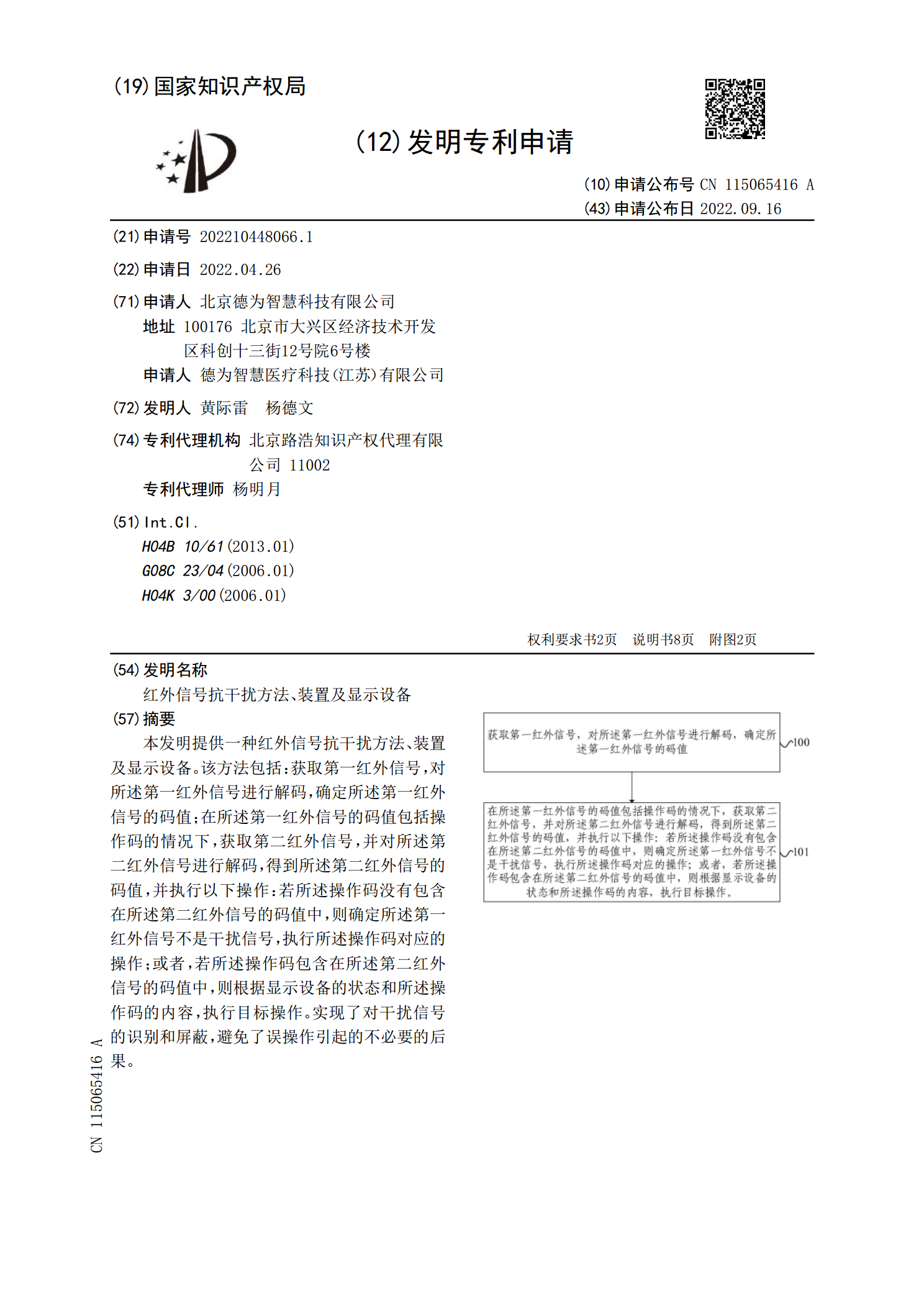
本发明提供一种红外信号抗干扰方法、装置及显示设备。该方法包括:获取第一红外信号,对所述第一红外信号进行解码,确定所述第一红外信号的码值;在所述第一红外信号的码值包括操作码的情况下,获取第二红外信号,并对所述第二红外信号进行解码,得到所述第二红外信号的码值,并执行以下操作:若所述操作码没有包含在所述第二红外信号的码值中,则确定所述第一红外信号不是干扰信号,执行所述操作码对应的操作;或者,若所述操作码包含在所述第二红外信号的码值中,则根据显示设备的状态和所述操作码的内容,执行目标操作。实现了对干扰信号的识别和