
一种基于MADDPG算法的无人机数据收集方法.pdf

一吃****海逸


1/10
2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于MADDPG算法的无人机数据收集方法.pdf
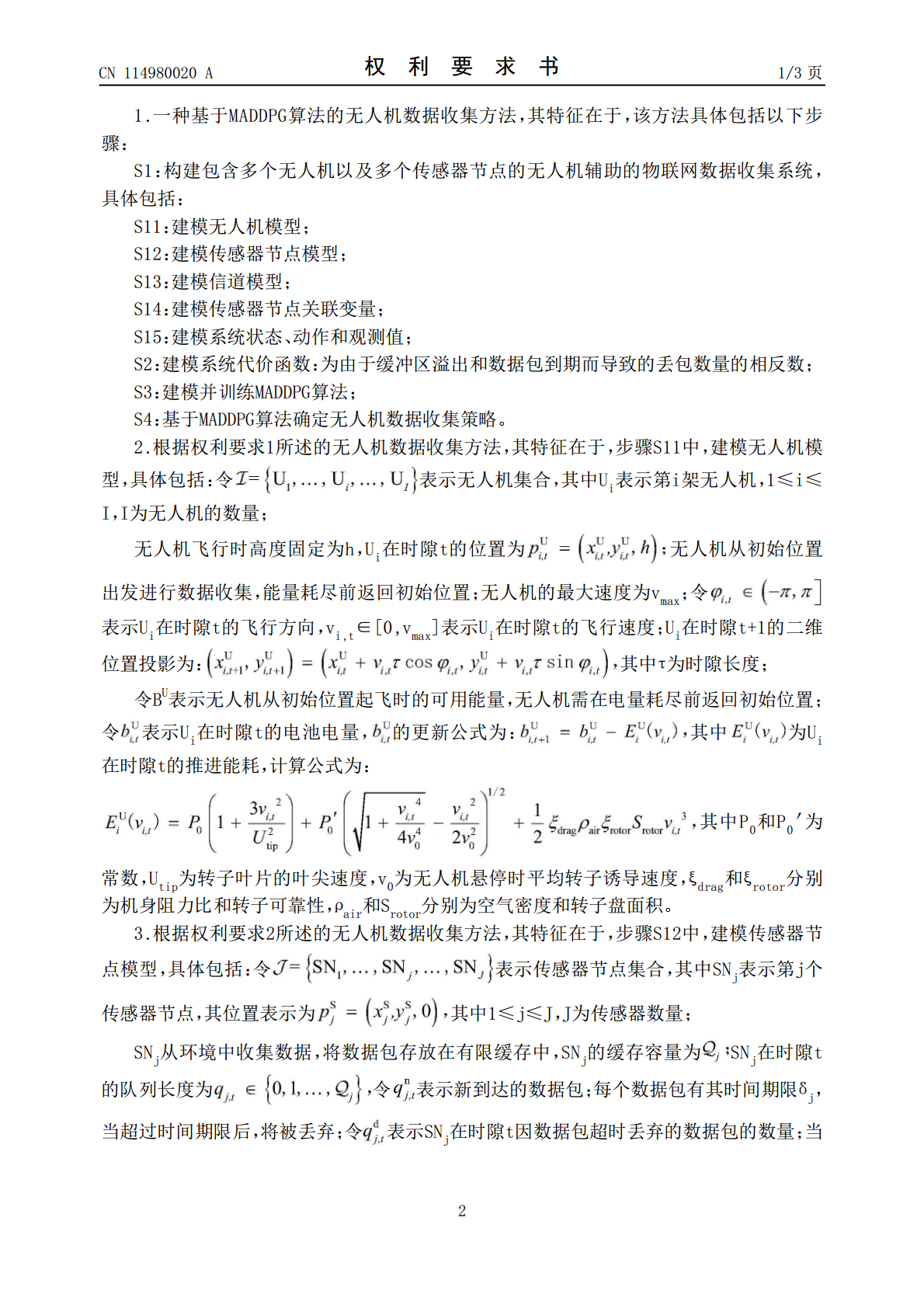
本发明涉及一种基于MADDPG算法的无人机数据收集方法,属于无线通信技术领域。该方法包括:S1:构建包含多个无人机以及多个传感器节点的无人机辅助的物联网数据收集系统,具体包括:建模无人机模型;建模传感器节点模型;建模信道模型;建模传感器节点关联变量;建模系统状态、动作和观测值;S2:建模系统代价函数:为由于缓冲区溢出和数据包到期而导致的丢包数量的相反数;S3:建模并训练MADDPG算法;S4:基于MADDPG算法确定无人机数据收集策略。本发明以最小化网络损失为优化目标,实现无人机数据收集轨迹及节点关联优化
一种基于MADDPG算法的映射运行方法.pdf
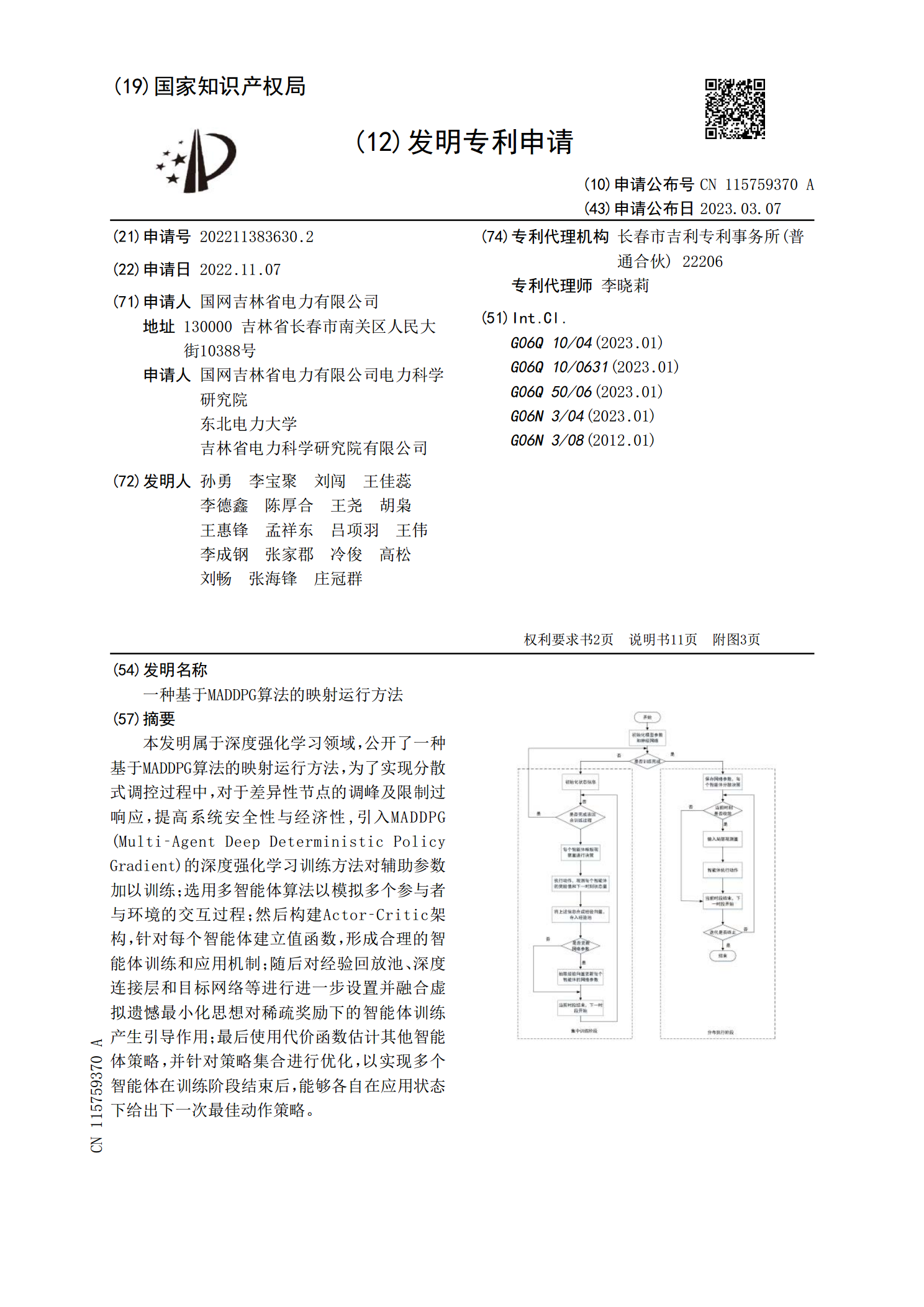
本发明属于深度强化学习领域,公开了一种基于MADDPG算法的映射运行方法,为了实现分散式调控过程中,对于差异性节点的调峰及限制过响应,提高系统安全性与经济性,引入MADDPG(Multi‑AgentDeepDeterministicPolicyGradient)的深度强化学习训练方法对辅助参数加以训练;选用多智能体算法以模拟多个参与者与环境的交互过程;然后构建Actor‑Critic架构,针对每个智能体建立值函数,形成合理的智能体训练和应用机制;随后对经验回放池、深度连接层和目标网络等进行进一步设
一种基于车辆与无人机协同的数据收集方法.pdf
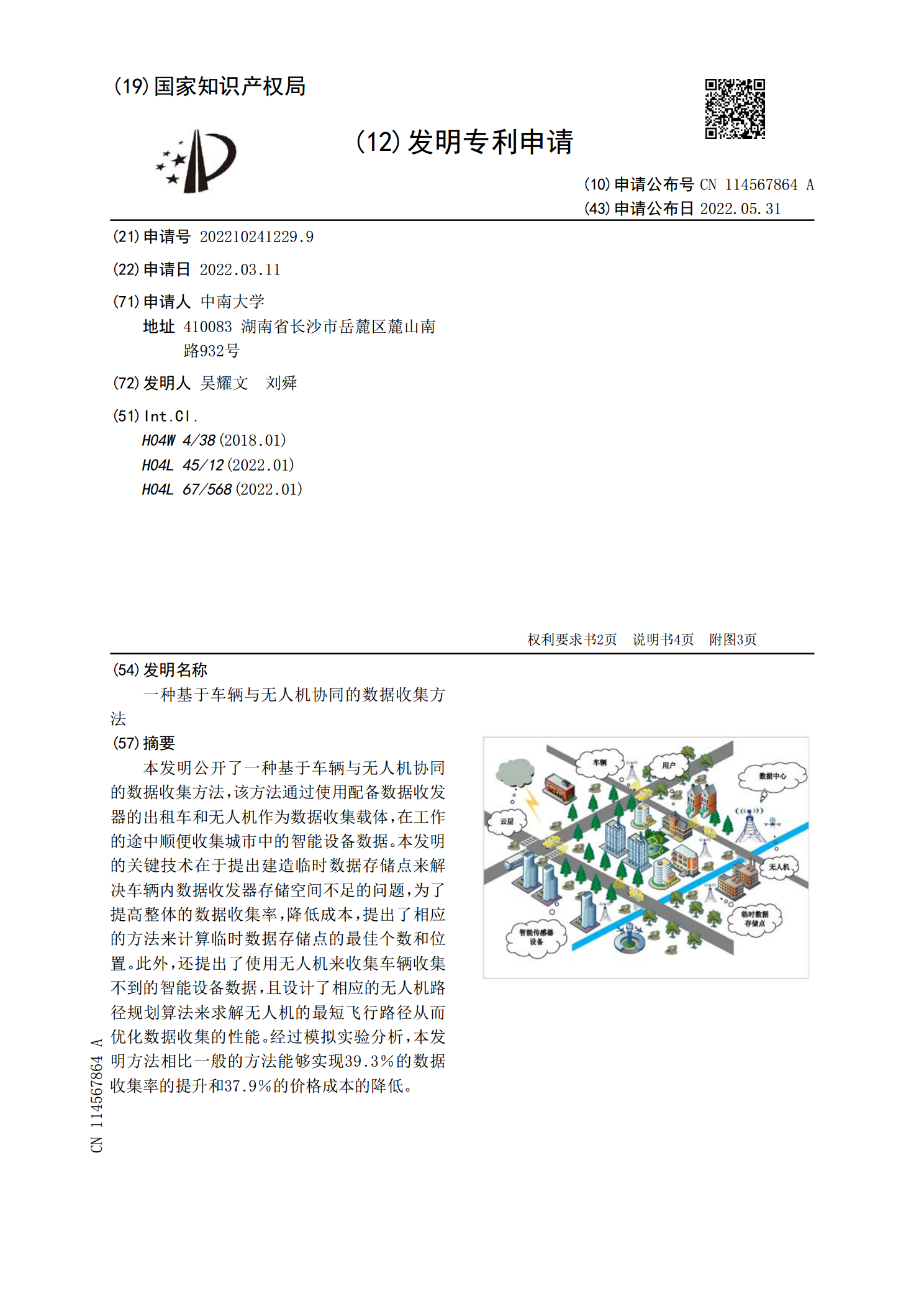
本发明公开了一种基于车辆与无人机协同的数据收集方法,该方法通过使用配备数据收发器的出租车和无人机作为数据收集载体,在工作的途中顺便收集城市中的智能设备数据。本发明的关键技术在于提出建造临时数据存储点来解决车辆内数据收发器存储空间不足的问题,为了提高整体的数据收集率,降低成本,提出了相应的方法来计算临时数据存储点的最佳个数和位置。此外,还提出了使用无人机来收集车辆收集不到的智能设备数据,且设计了相应的无人机路径规划算法来求解无人机的最短飞行路径从而优化数据收集的性能。经过模拟实验分析,本发明方法相比一般的方
基于策略集合MADDPG多无人机协同攻防对抗方法.pdf
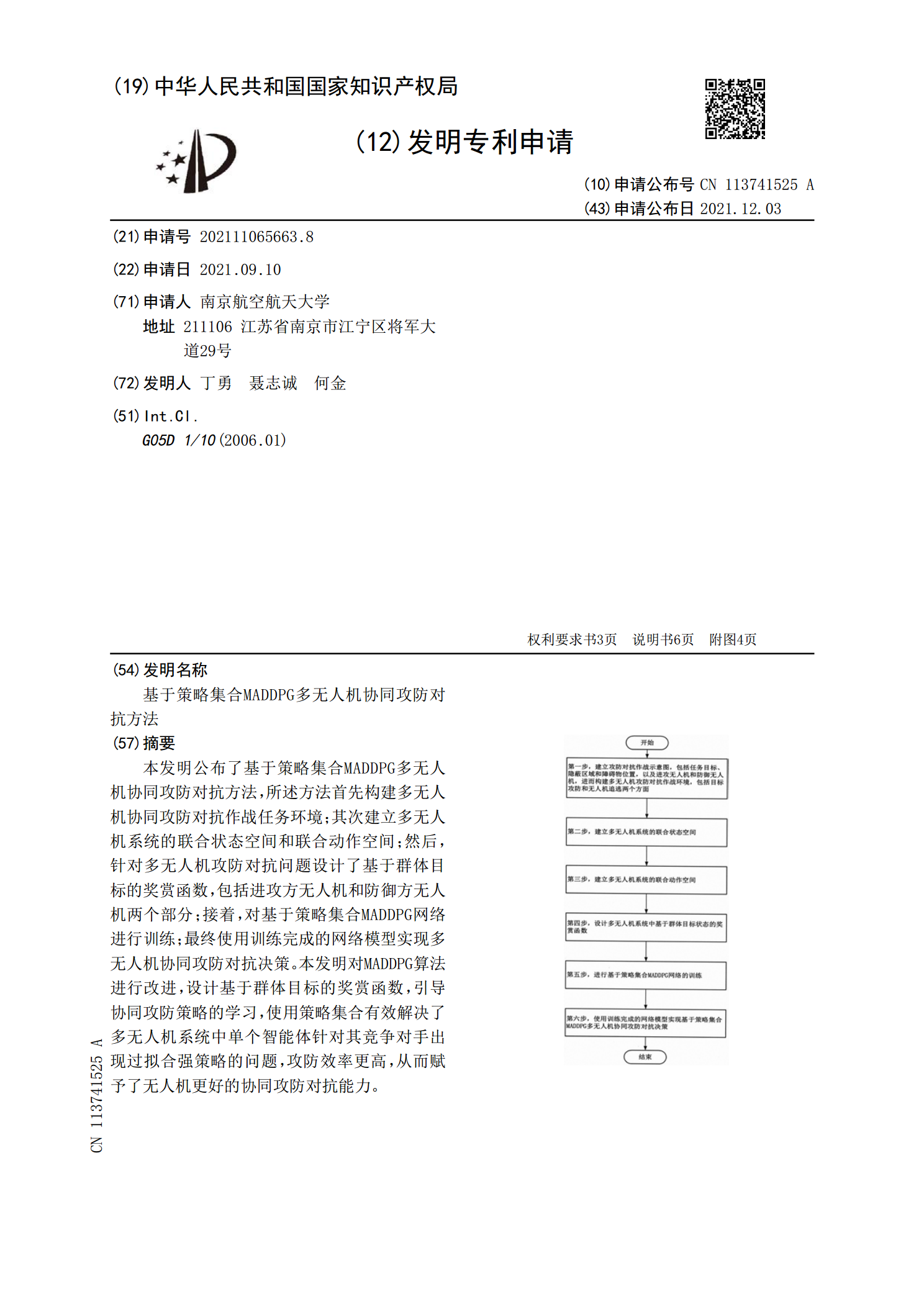
本发明公布了基于策略集合MADDPG多无人机协同攻防对抗方法,所述方法首先构建多无人机协同攻防对抗作战任务环境;其次建立多无人机系统的联合状态空间和联合动作空间;然后,针对多无人机攻防对抗问题设计了基于群体目标的奖赏函数,包括进攻方无人机和防御方无人机两个部分;接着,对基于策略集合MADDPG网络进行训练;最终使用训练完成的网络模型实现多无人机协同攻防对抗决策。本发明对MADDPG算法进行改进,设计基于群体目标的奖赏函数,引导协同攻防策略的学习,使用策略集合有效解决了多无人机系统中单个智能体针对其竞争对手

一种无线传感网络中基于无人机的可信数据收集方法.pdf
本发明公开了一种无线传感网络中基于无人机的可信数据收集方法,方法的核心技术在于可信的簇头选举、无人机飞行轨迹的选择以及节点可信度的动态更新。在每一轮数据收集中,首先根据初始可信度随机选择节点,或根据之前经过评估得到的可信度数据选择可信度较高的节点作为簇头,然后根据簇头序号随机生成多种无人机飞行路径方案,并通过综合评价指标选择效果最好的路径,当无人机完成数据收集后,对节点信任度进行评估,识别恶意节点,提高数据收集质量。同时由于本文方法采用无人机完成数据收集,故有效降低了网络中核心节点的能量消耗,提高了网络寿