
一种基于车辆与无人机协同的数据收集方法.pdf

是秋****写意

1/10
2/10
3/10
4/10
5/10

6/10
7/10

8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于车辆与无人机协同的数据收集方法.pdf
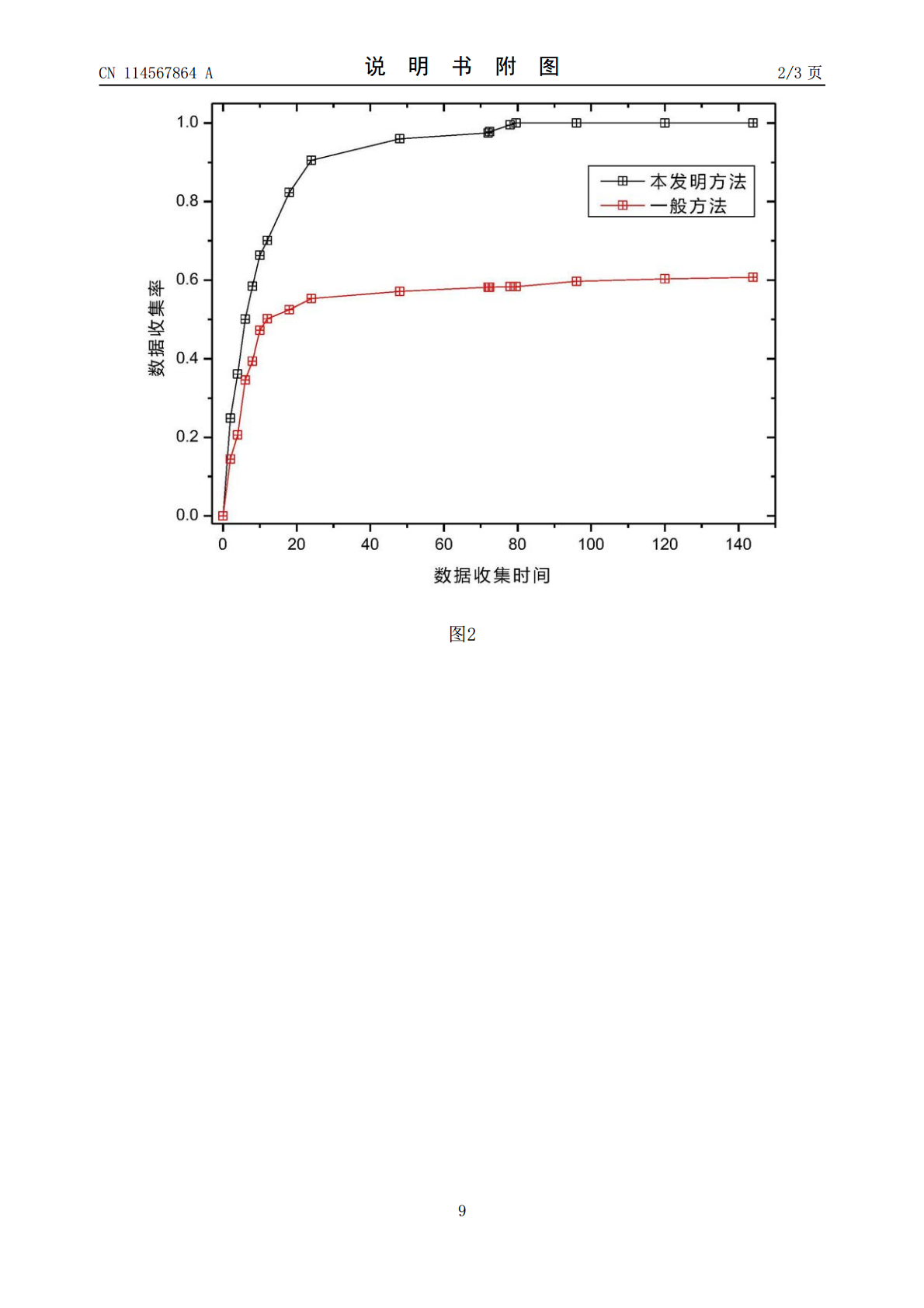
本发明公开了一种基于车辆与无人机协同的数据收集方法,该方法通过使用配备数据收发器的出租车和无人机作为数据收集载体,在工作的途中顺便收集城市中的智能设备数据。本发明的关键技术在于提出建造临时数据存储点来解决车辆内数据收发器存储空间不足的问题,为了提高整体的数据收集率,降低成本,提出了相应的方法来计算临时数据存储点的最佳个数和位置。此外,还提出了使用无人机来收集车辆收集不到的智能设备数据,且设计了相应的无人机路径规划算法来求解无人机的最短飞行路径从而优化数据收集的性能。经过模拟实验分析,本发明方法相比一般的方

一种基于MADDPG算法的无人机数据收集方法.pdf
本发明涉及一种基于MADDPG算法的无人机数据收集方法,属于无线通信技术领域。该方法包括:S1:构建包含多个无人机以及多个传感器节点的无人机辅助的物联网数据收集系统,具体包括:建模无人机模型;建模传感器节点模型;建模信道模型;建模传感器节点关联变量;建模系统状态、动作和观测值;S2:建模系统代价函数:为由于缓冲区溢出和数据包到期而导致的丢包数量的相反数;S3:建模并训练MADDPG算法;S4:基于MADDPG算法确定无人机数据收集策略。本发明以最小化网络损失为优化目标,实现无人机数据收集轨迹及节点关联优化

一种无线传感网络中基于无人机的可信数据收集方法.pdf
本发明公开了一种无线传感网络中基于无人机的可信数据收集方法,方法的核心技术在于可信的簇头选举、无人机飞行轨迹的选择以及节点可信度的动态更新。在每一轮数据收集中,首先根据初始可信度随机选择节点,或根据之前经过评估得到的可信度数据选择可信度较高的节点作为簇头,然后根据簇头序号随机生成多种无人机飞行路径方案,并通过综合评价指标选择效果最好的路径,当无人机完成数据收集后,对节点信任度进行评估,识别恶意节点,提高数据收集质量。同时由于本文方法采用无人机完成数据收集,故有效降低了网络中核心节点的能量消耗,提高了网络寿
一种基于图论的多无人机协同控制方法.pdf
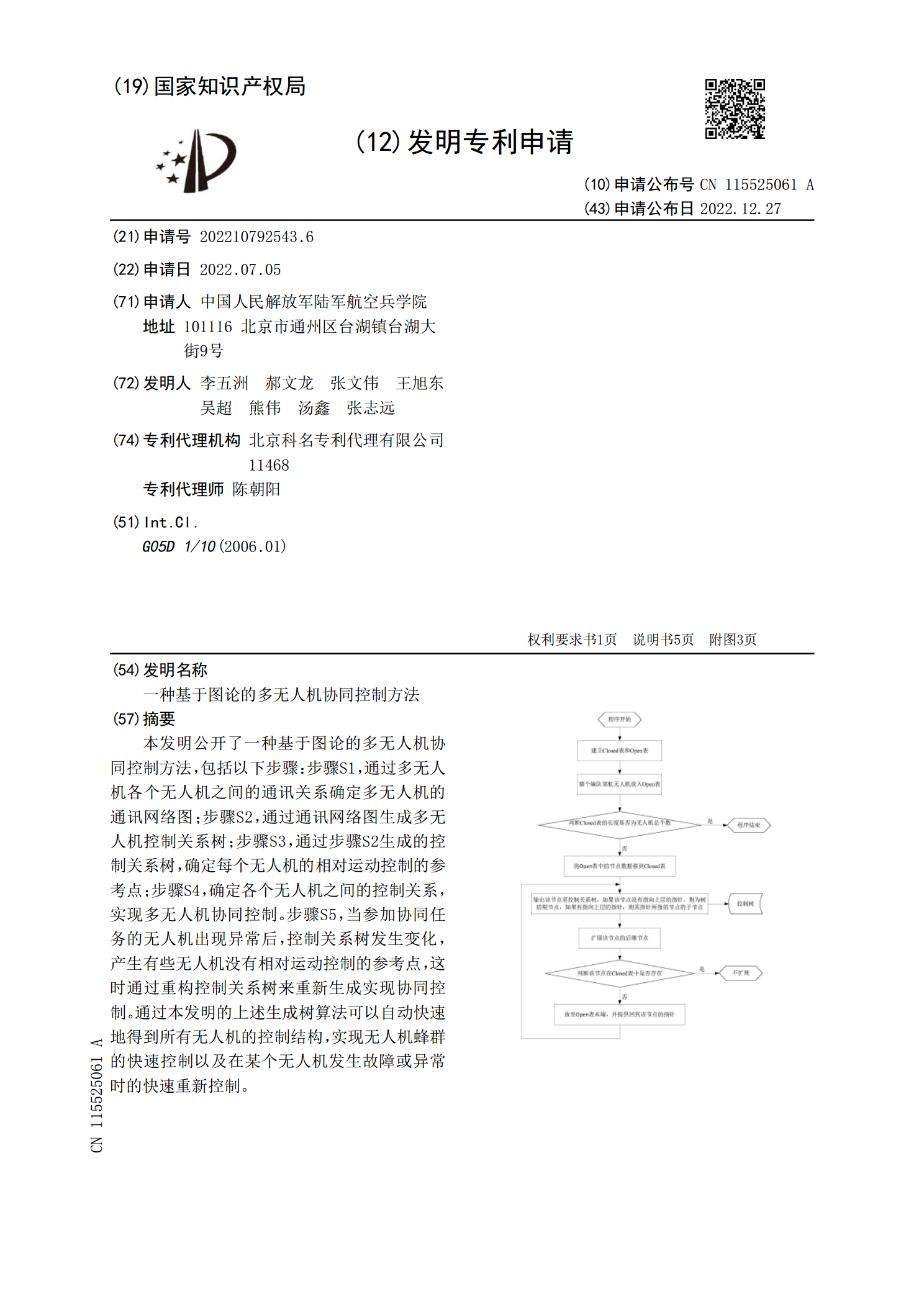
本发明公开了一种基于图论的多无人机协同控制方法,包括以下步骤:步骤S1,通过多无人机各个无人机之间的通讯关系确定多无人机的通讯网络图;步骤S2,通过通讯网络图生成多无人机控制关系树;步骤S3,通过步骤S2生成的控制关系树,确定每个无人机的相对运动控制的参考点;步骤S4,确定各个无人机之间的控制关系,实现多无人机协同控制。步骤S5,当参加协同任务的无人机出现异常后,控制关系树发生变化,产生有些无人机没有相对运动控制的参考点,这时通过重构控制关系树来重新生成实现协同控制。通过本发明的上述生成树算法可以自动快速
一种基于Q学习的无人机辅助数据收集系统及方法.pdf
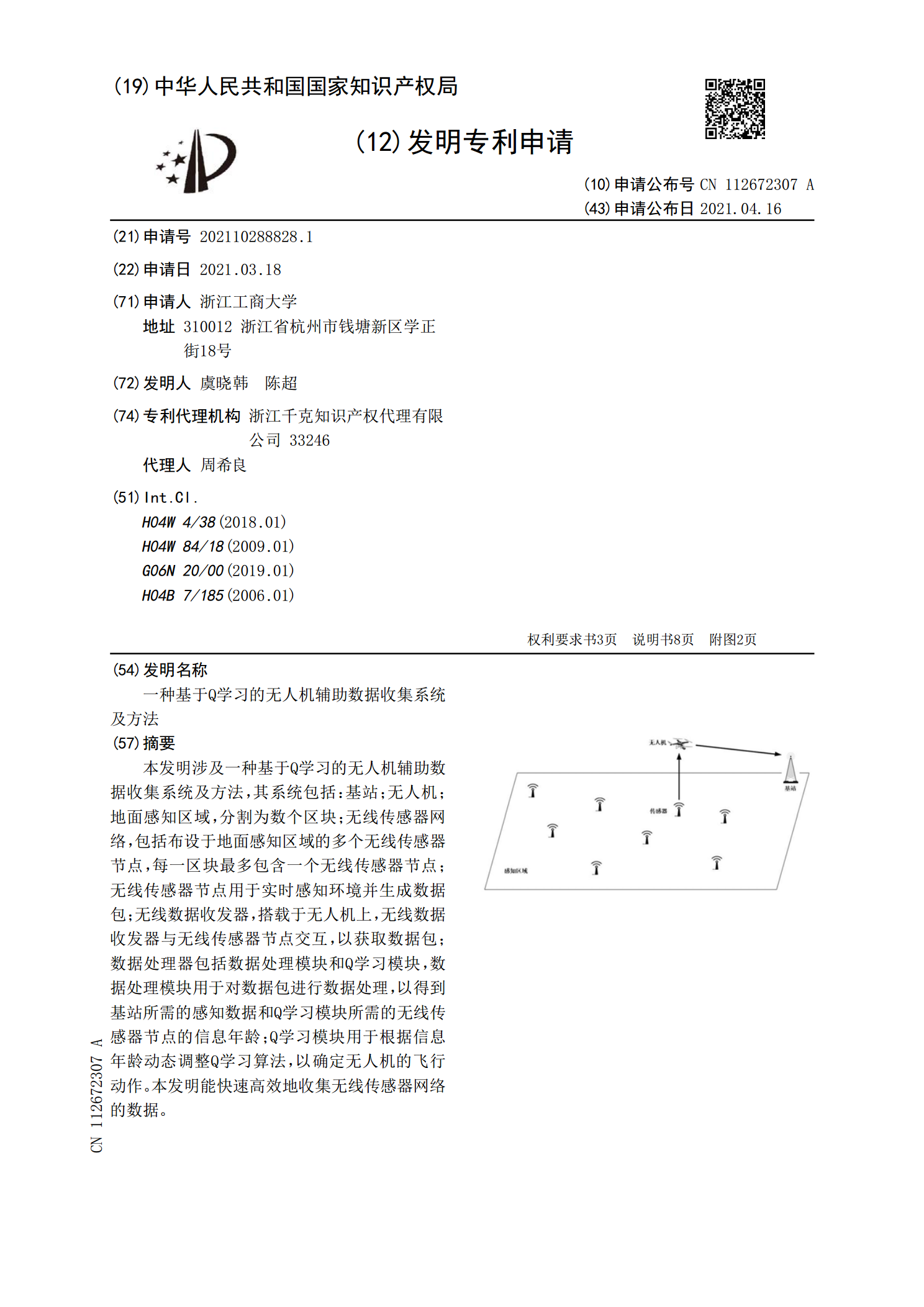
本发明涉及一种基于Q学习的无人机辅助数据收集系统及方法,其系统包括:基站;无人机;地面感知区域,分割为数个区块;无线传感器网络,包括布设于地面感知区域的多个无线传感器节点,每一区块最多包含一个无线传感器节点;无线传感器节点用于实时感知环境并生成数据包;无线数据收发器,搭载于无人机上,无线数据收发器与无线传感器节点交互,以获取数据包;数据处理器包括数据处理模块和Q学习模块,数据处理模块用于对数据包进行数据处理,以得到基站所需的感知数据和Q学习模块所需的无线传感器节点的信息年龄;Q学习模块用于根据信息年龄动态