
机械臂控制方法、装置、电子设备及可读存储介质.pdf

元枫****文章

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机械臂控制方法、装置、电子设备及可读存储介质.pdf
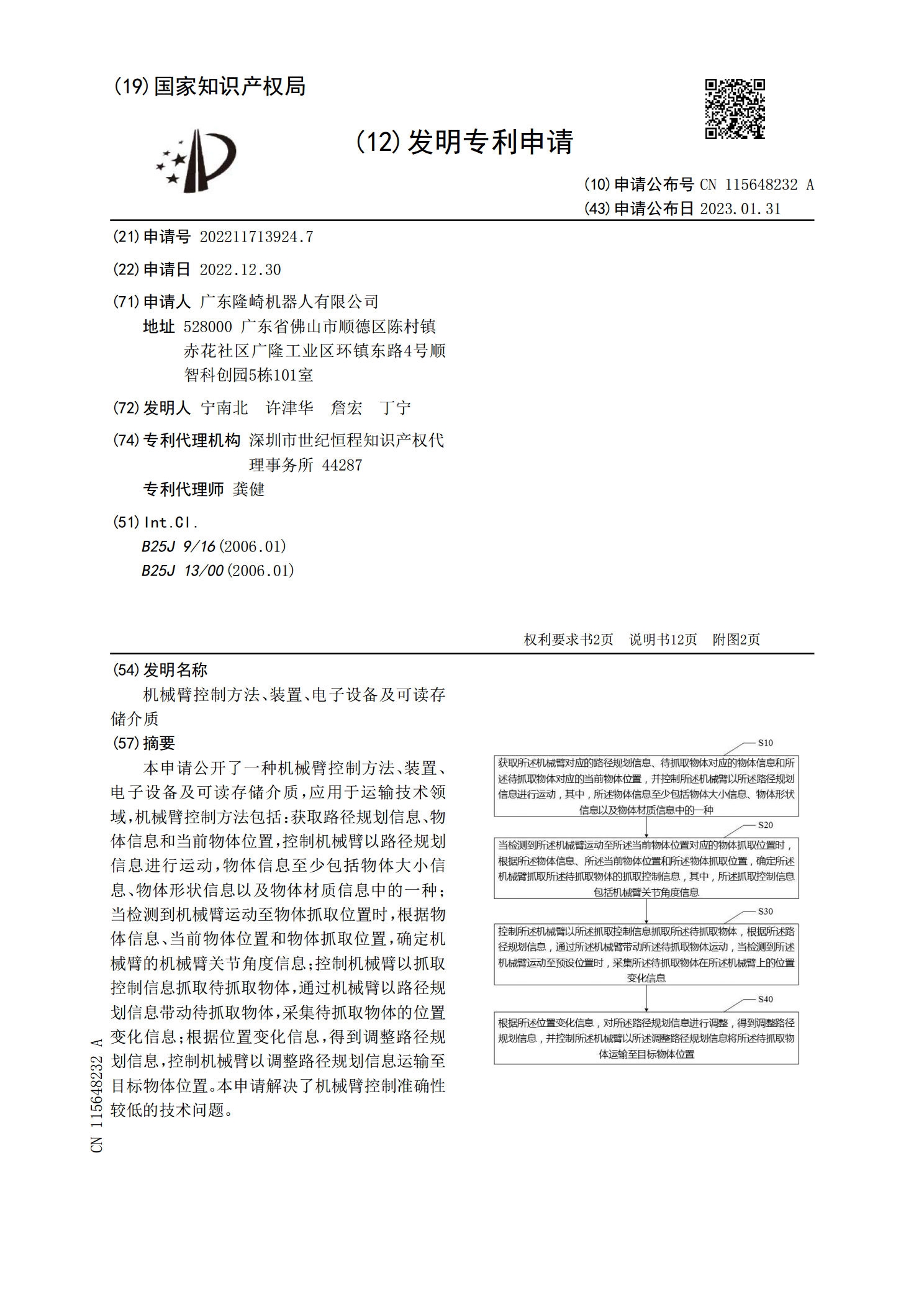
本申请公开了一种机械臂控制方法、装置、电子设备及可读存储介质,应用于运输技术领域,机械臂控制方法包括:获取路径规划信息、物体信息和当前物体位置,控制机械臂以路径规划信息进行运动,物体信息至少包括物体大小信息、物体形状信息以及物体材质信息中的一种;当检测到机械臂运动至物体抓取位置时,根据物体信息、当前物体位置和物体抓取位置,确定机械臂的机械臂关节角度信息;控制机械臂以抓取控制信息抓取待抓取物体,通过机械臂以路径规划信息带动待抓取物体,采集待抓取物体的位置变化信息;根据位置变化信息,得到调整路径规划信息,控制
机械臂运动控制方法、装置、存储介质及电子设备.pdf
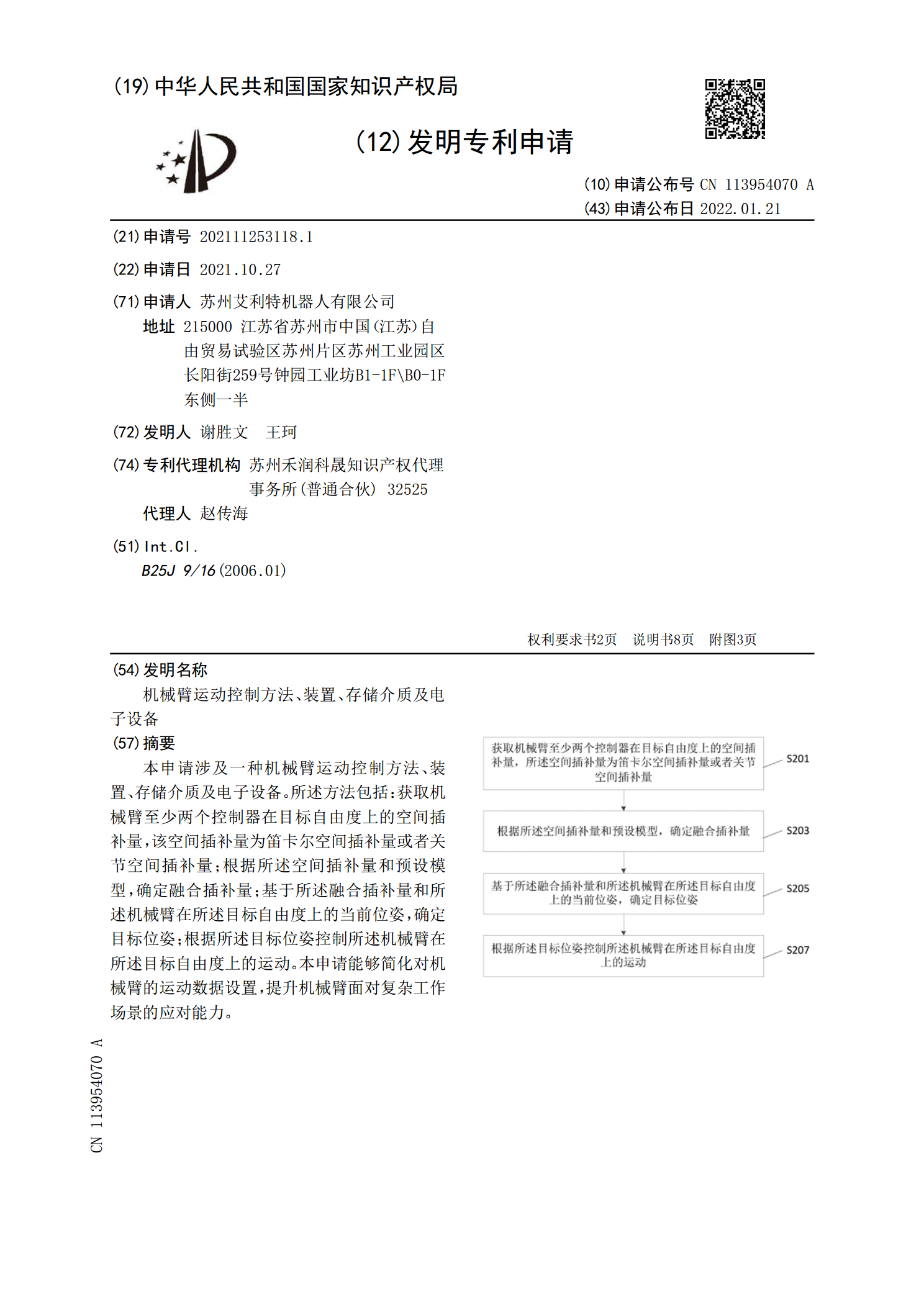
本申请涉及一种机械臂运动控制方法、装置、存储介质及电子设备。所述方法包括:获取机械臂至少两个控制器在目标自由度上的空间插补量,该空间插补量为笛卡尔空间插补量或者关节空间插补量;根据所述空间插补量和预设模型,确定融合插补量;基于所述融合插补量和所述机械臂在所述目标自由度上的当前位姿,确定目标位姿;根据所述目标位姿控制所述机械臂在所述目标自由度上的运动。本申请能够简化对机械臂的运动数据设置,提升机械臂面对复杂工作场景的应对能力。
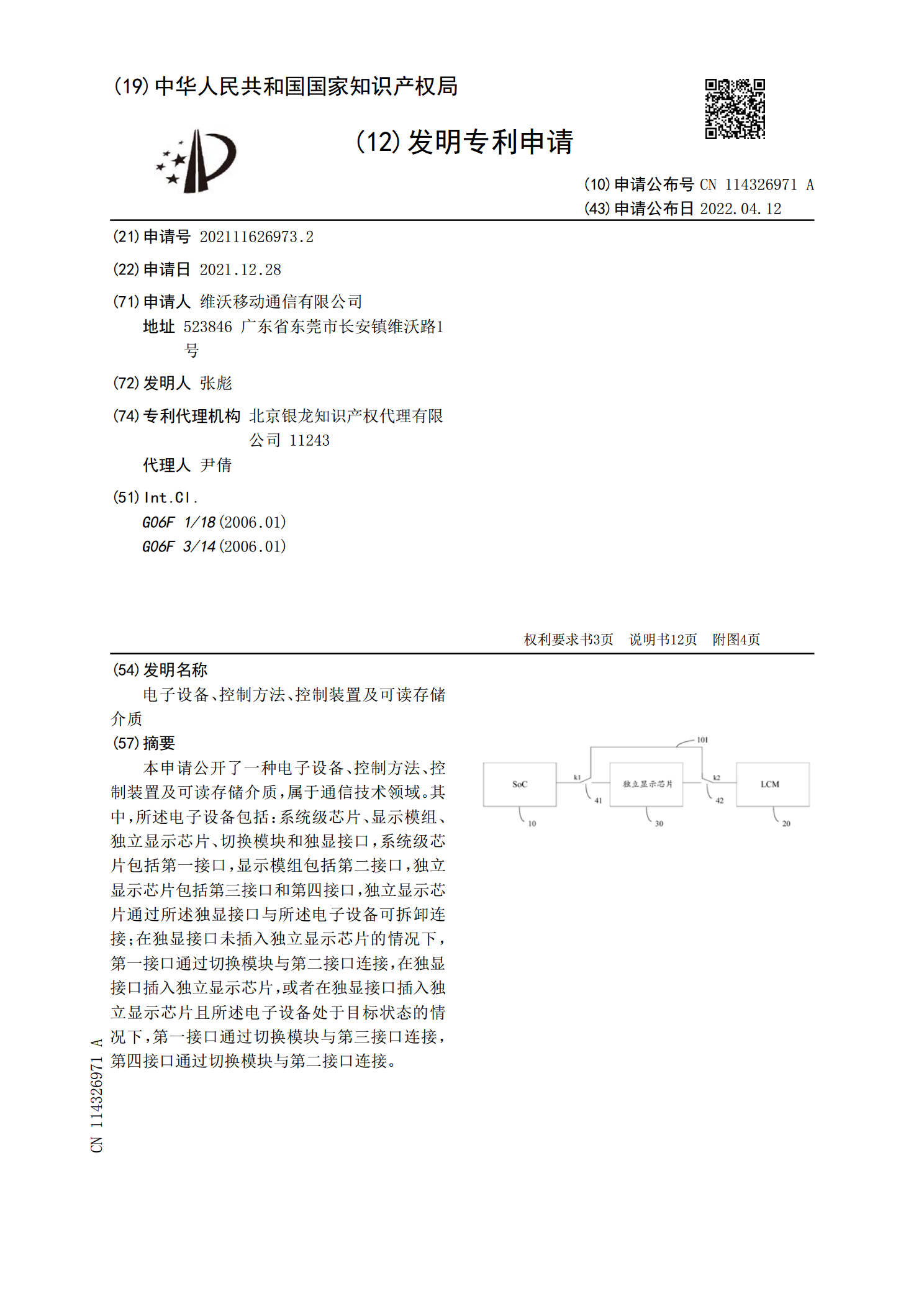
电子设备、控制方法、控制装置及可读存储介质.pdf
本申请公开了一种电子设备、控制方法、控制装置及可读存储介质,属于通信技术领域。其中,所述电子设备包括:系统级芯片、显示模组、独立显示芯片、切换模块和独显接口,系统级芯片包括第一接口,显示模组包括第二接口,独立显示芯片包括第三接口和第四接口,独立显示芯片通过所述独显接口与所述电子设备可拆卸连接;在独显接口未插入独立显示芯片的情况下,第一接口通过切换模块与第二接口连接,在独显接口插入独立显示芯片,或者在独显接口插入独立显示芯片且所述电子设备处于目标状态的情况下,第一接口通过切换模块与第三接口连接,第四接口通过
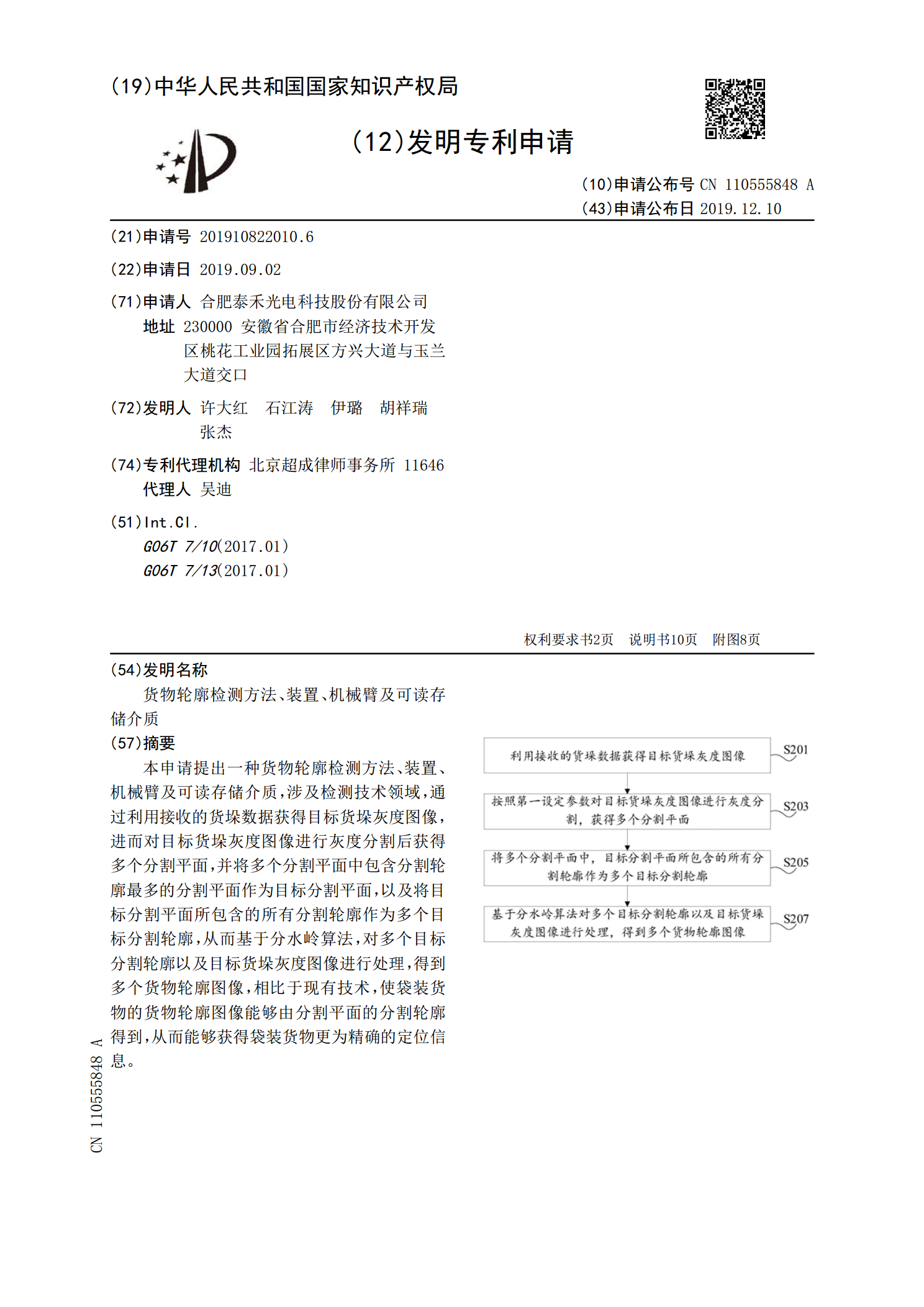
货物轮廓检测方法、装置、机械臂及可读存储介质.pdf
本申请提出一种货物轮廓检测方法、装置、机械臂及可读存储介质,涉及检测技术领域,通过利用接收的货垛数据获得目标货垛灰度图像,进而对目标货垛灰度图像进行灰度分割后获得多个分割平面,并将多个分割平面中包含分割轮廓最多的分割平面作为目标分割平面,以及将目标分割平面所包含的所有分割轮廓作为多个目标分割轮廓,从而基于分水岭算法,对多个目标分割轮廓以及目标货垛灰度图像进行处理,得到多个货物轮廓图像,相比于现有技术,使袋装货物的货物轮廓图像能够由分割平面的分割轮廓得到,从而能够获得袋装货物更为精确的定位信息。
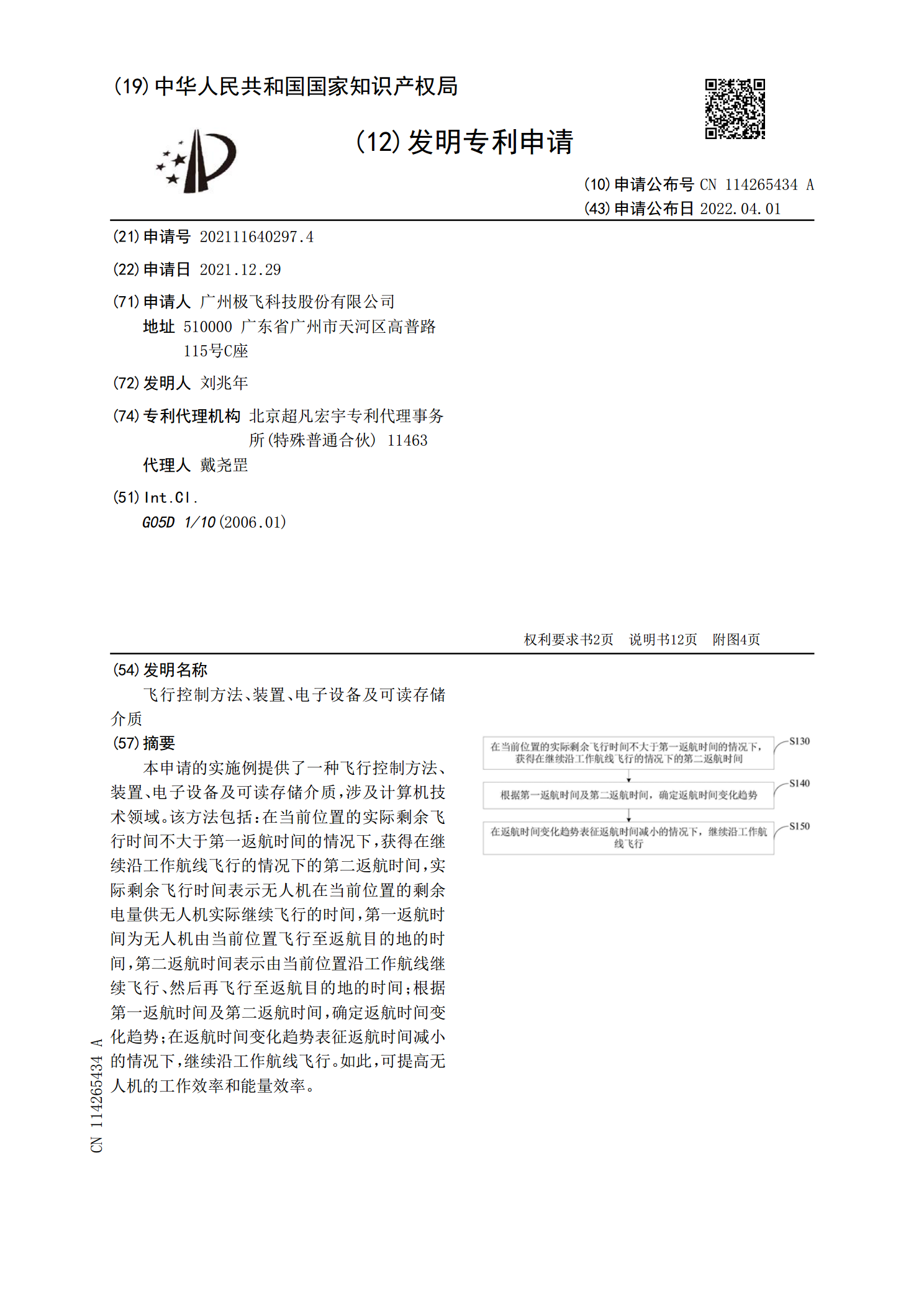
飞行控制方法、装置、电子设备及可读存储介质.pdf
本申请的实施例提供了一种飞行控制方法、装置、电子设备及可读存储介质,涉及计算机技术领域。该方法包括:在当前位置的实际剩余飞行时间不大于第一返航时间的情况下,获得在继续沿工作航线飞行的情况下的第二返航时间,实际剩余飞行时间表示无人机在当前位置的剩余电量供无人机实际继续飞行的时间,第一返航时间为无人机由当前位置飞行至返航目的地的时间,第二返航时间表示由当前位置沿工作航线继续飞行、然后再飞行至返航目的地的时间;根据第一返航时间及第二返航时间,确定返航时间变化趋势;在返航时间变化趋势表征返航时间减小的情况下,继续