
一种基于视觉特征的室内空间辅助定位方法.pdf

努力****向丝


1/10
2/10

3/10
4/10

5/10
6/10

7/10

8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于视觉特征的室内空间辅助定位方法.pdf
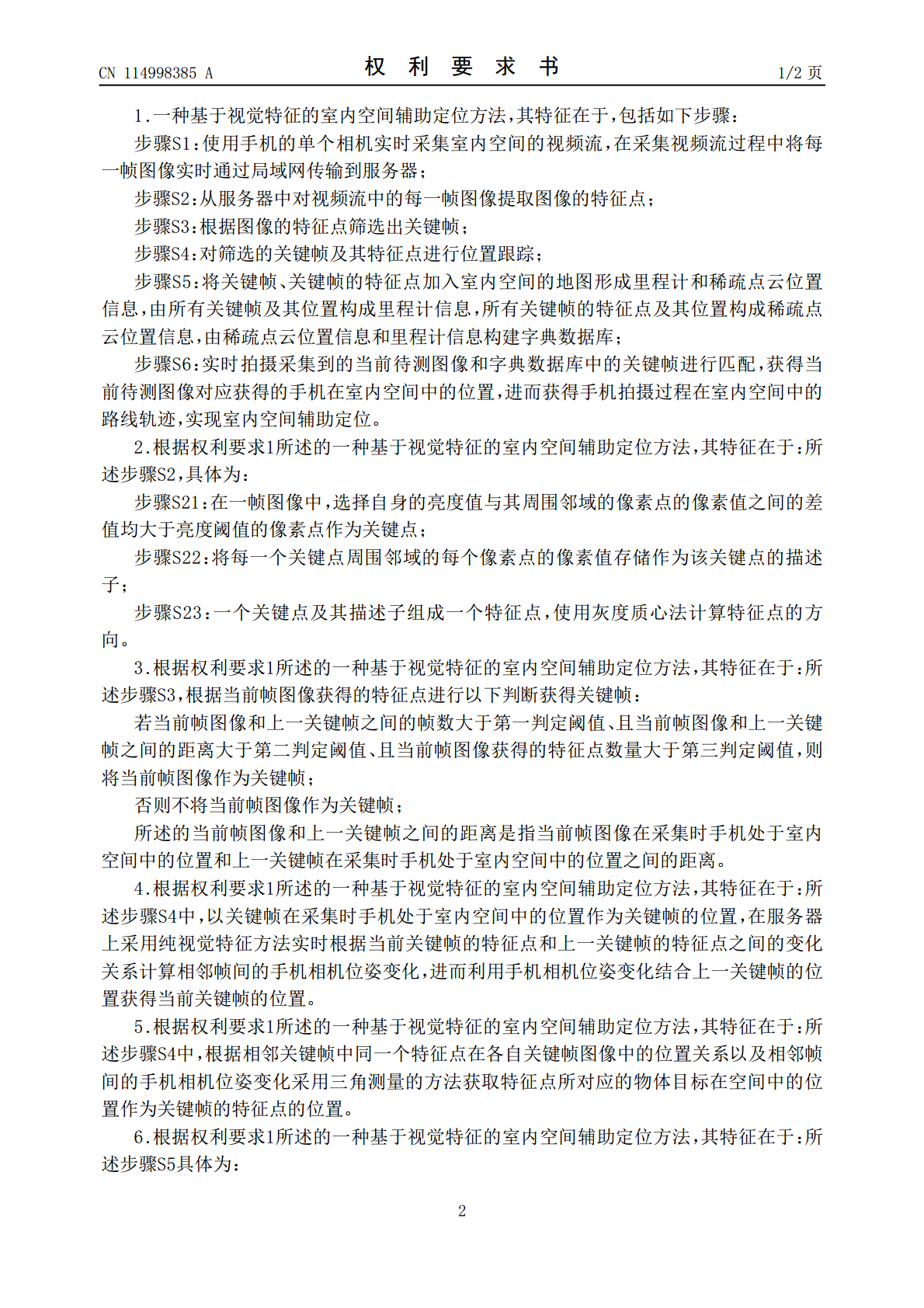
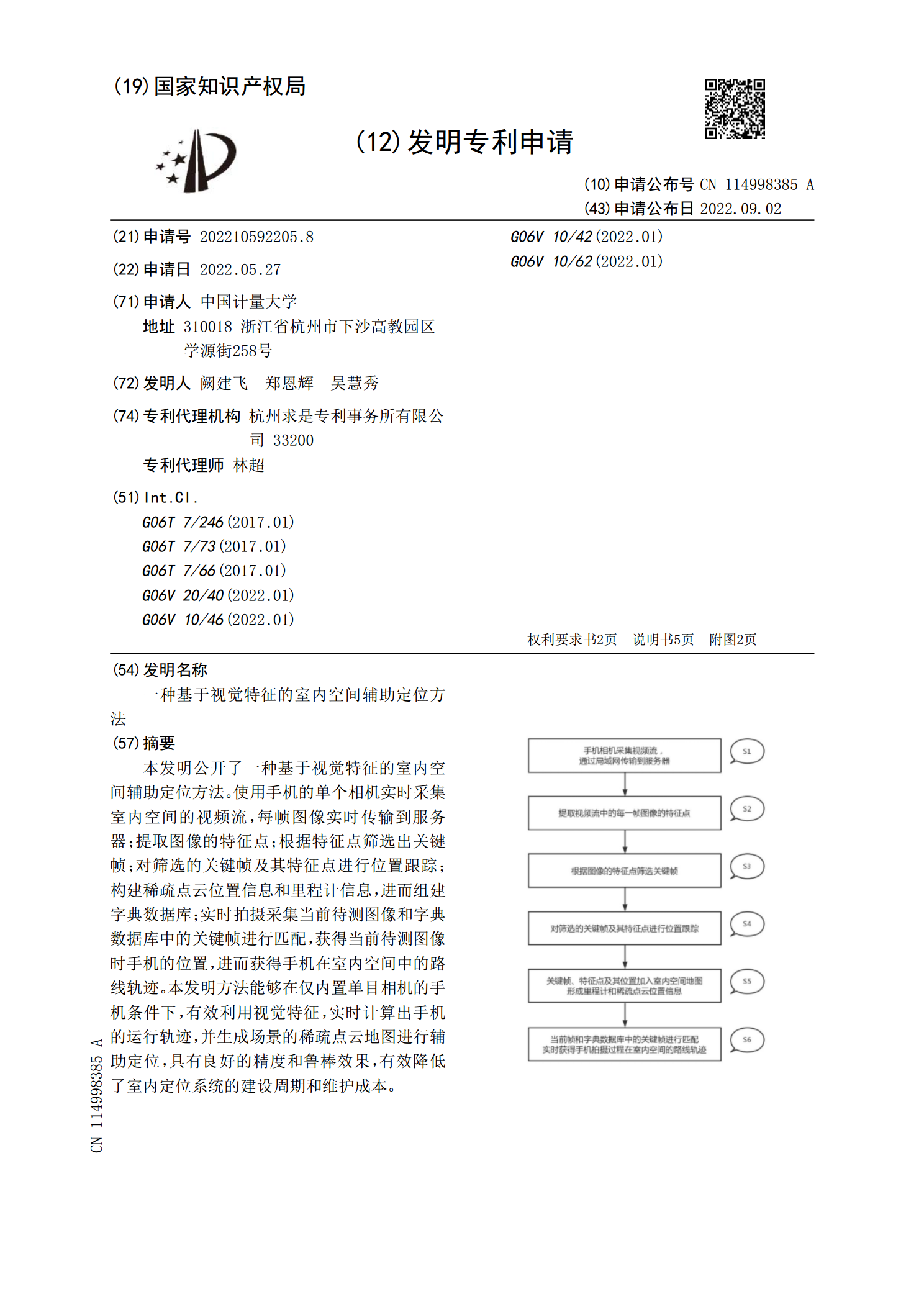
本发明公开了一种基于视觉特征的室内空间辅助定位方法。使用手机的单个相机实时采集室内空间的视频流,每帧图像实时传输到服务器;提取图像的特征点;根据特征点筛选出关键帧;对筛选的关键帧及其特征点进行位置跟踪;构建稀疏点云位置信息和里程计信息,进而组建字典数据库;实时拍摄采集当前待测图像和字典数据库中的关键帧进行匹配,获得当前待测图像时手机的位置,进而获得手机在室内空间中的路线轨迹。本发明方法能够在仅内置单目相机的手机条件下,有效利用视觉特征,实时计算出手机的运行轨迹,并生成场景的稀疏点云地图进行辅助定位,具有良

一种基于深度特征的室外环境下激光地图辅助视觉定位方法.docx
一种基于深度特征的室外环境下激光地图辅助视觉定位方法一种基于深度特征的室外环境下激光地图辅助视觉定位方法摘要:随着机器人对环境感知能力的不断提高,室外环境下视觉定位是一个重要的问题。本文提出了一种基于深度特征的激光地图辅助视觉定位方法。首先,通过激光传感器获取环境的三维结构信息,并构建激光地图。然后,利用深度学习算法提取图像的特征表示,并将其与激光地图进行融合,得到一个更强大的定位能力。实验结果表明,所提出的方法在室外环境下具有较高的精度和鲁棒性。关键词:视觉定位,激光地图,深度特征,深度学习1.引言在室
一种基于点线特征融合的视觉惯性定位方法.pdf
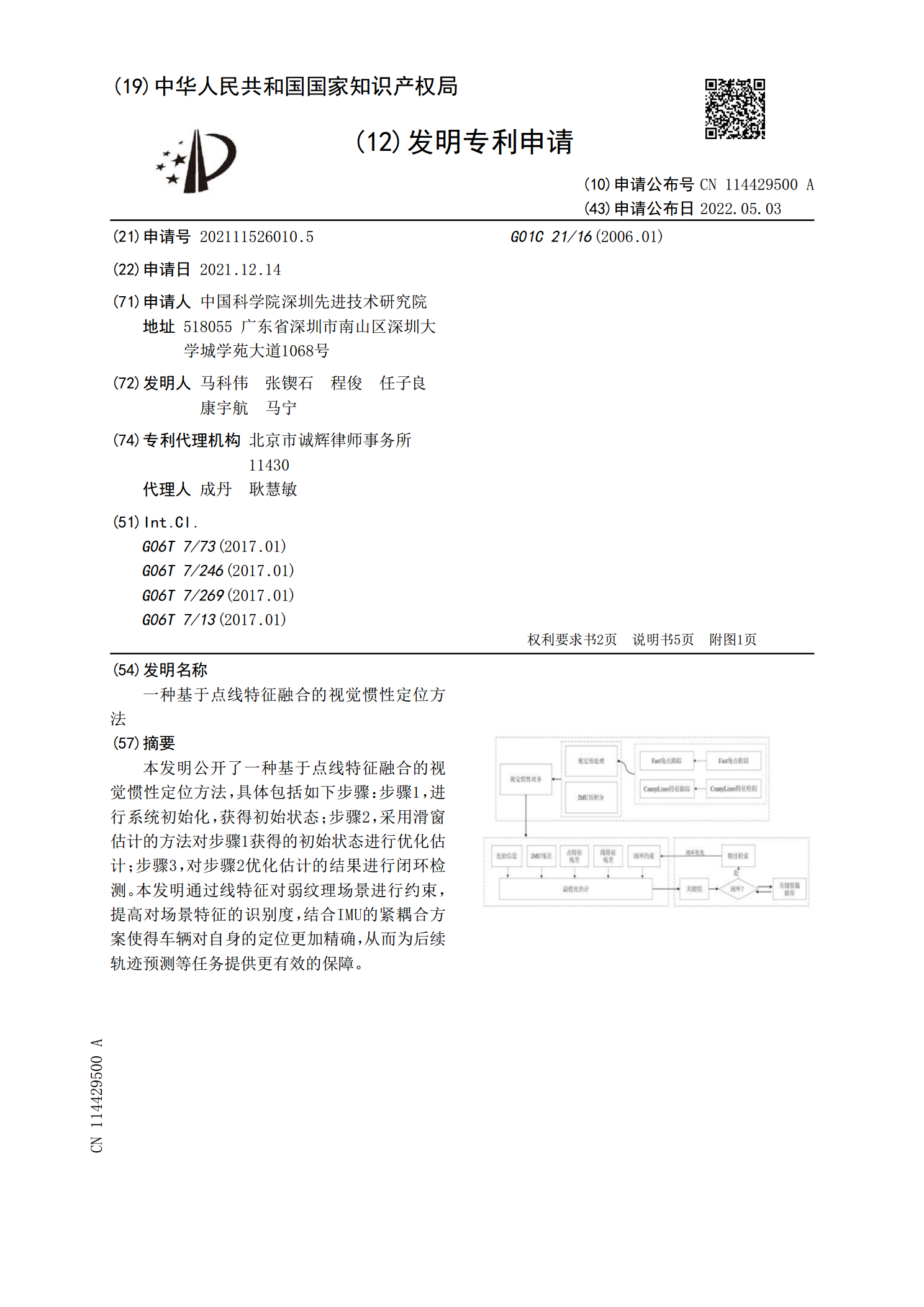
本发明公开了一种基于点线特征融合的视觉惯性定位方法,具体包括如下步骤:步骤1,进行系统初始化,获得初始状态;步骤2,采用滑窗估计的方法对步骤1获得的初始状态进行优化估计;步骤3,对步骤2优化估计的结果进行闭环检测。本发明通过线特征对弱纹理场景进行约束,提高对场景特征的识别度,结合IMU的紧耦合方案使得车辆对自身的定位更加精确,从而为后续轨迹预测等任务提供更有效的保障。

一种基于鲁棒特征跟踪的视觉定位方法.pdf
本发明公开了一种基于图像处理及机器视觉的鲁棒特征跟踪与立体视觉定位技术。该技术可以在相机晃动以及室外光照条件下,融合惯性信息和视觉信息,实现可靠的立体视觉定位。通过双目摄像机实时采集图像,同时利用惯性测量单元采集相机旋转信息。利用特征提取算法提取图像中的特征点,并对左右图像中的特征点进行立体匹配。结合惯性信息,通过惯性融合KLT算法跟踪特征点,提高特征跟踪可靠性。利用双视几何原理恢复特征点的三维信息。使用高斯牛顿迭代的方法由特征点位置信息求得相机运动参数。使用RANSIC算法进一步提高视觉定位准确度。整个

一种基于CNN的视觉先验地图的辅助定位方法.pdf
本发明涉及一种基于CNN的视觉先验地图的辅助定位方法,包括如下步骤:从单目相机获取图像信息,通过2D特征提取方法,获取2D直线特征,通过预训练好的图像深度估计CNN模型获取深度图像数据,根据所述2D直线特征以及所述深度图像数据构建视觉先验地图;针对所述图像信息,获取图像直线特征,根据所述图像直线特征以及所述视觉先验地图,实现视觉先验地图与图像直线特征的匹配,通过位姿估计获取偏移量,实现在空间环境中的定位。与现有技术相比,本发明实现在IMU缺乏高速运动难以获得噪声与偏差测量的情况下,利用提前构建的基于CNN