
一种基于鲁棒特征跟踪的视觉定位方法.pdf

王秋****哥哥


1/10
2/10
3/10
4/10

5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于鲁棒特征跟踪的视觉定位方法.pdf
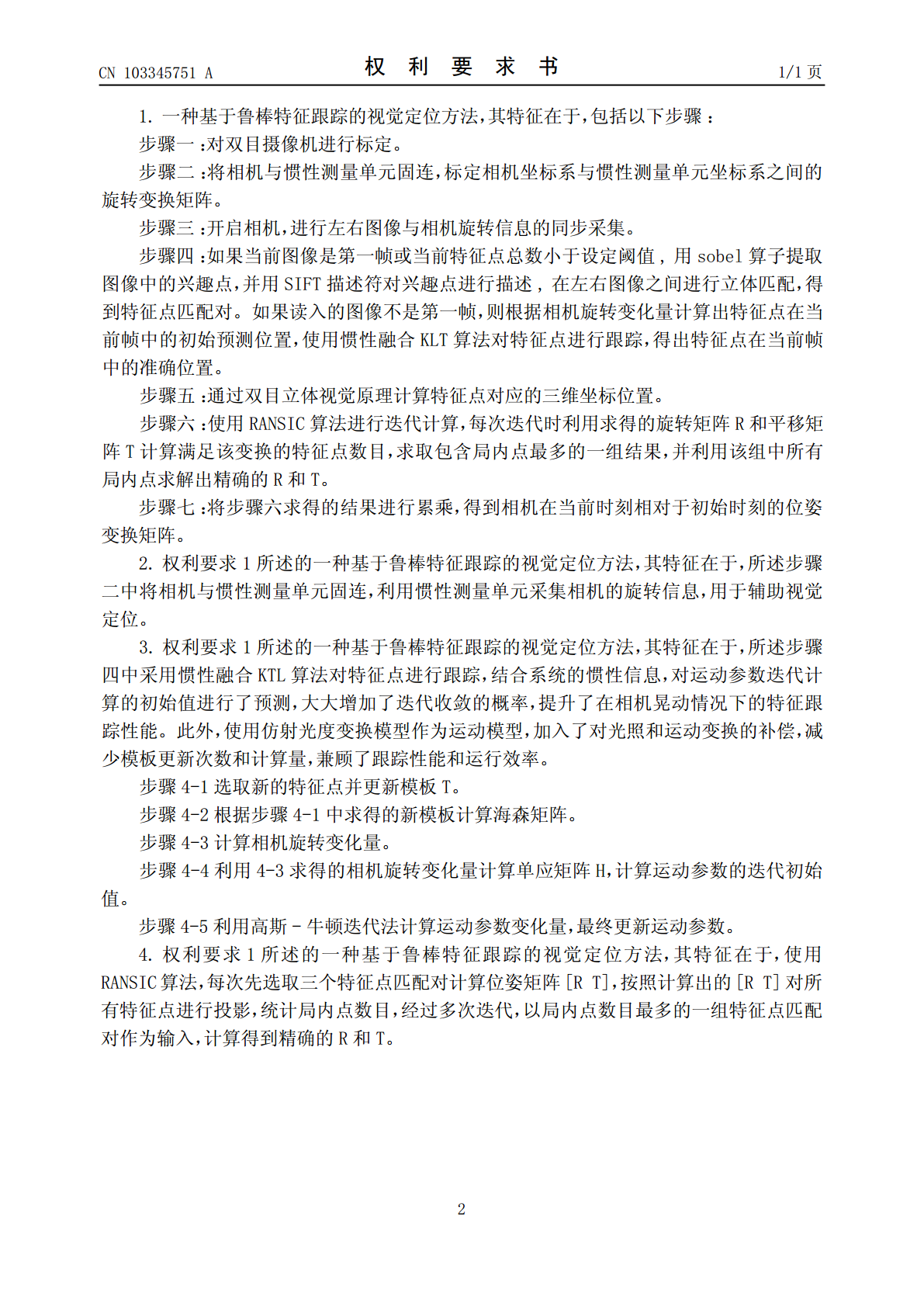
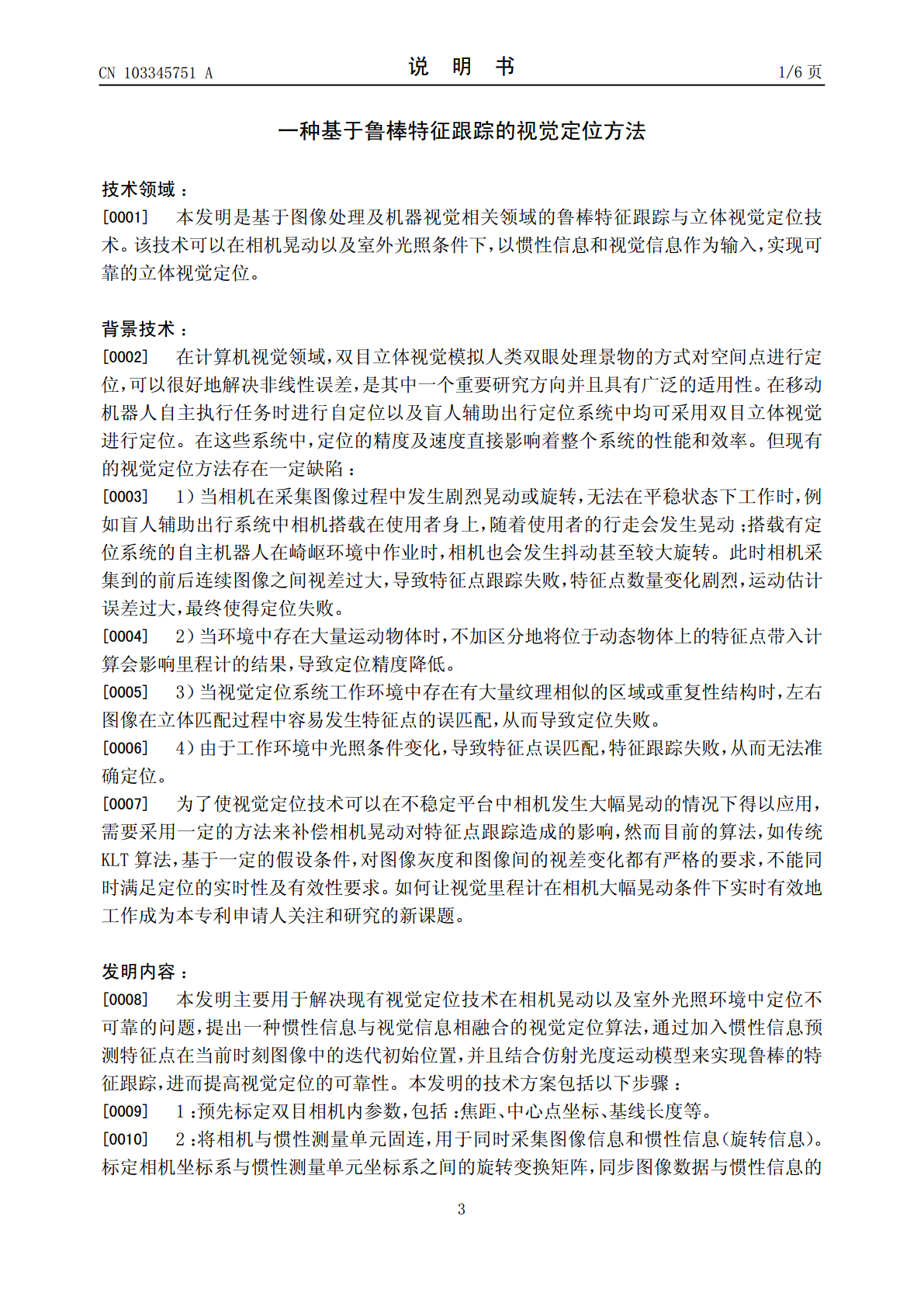
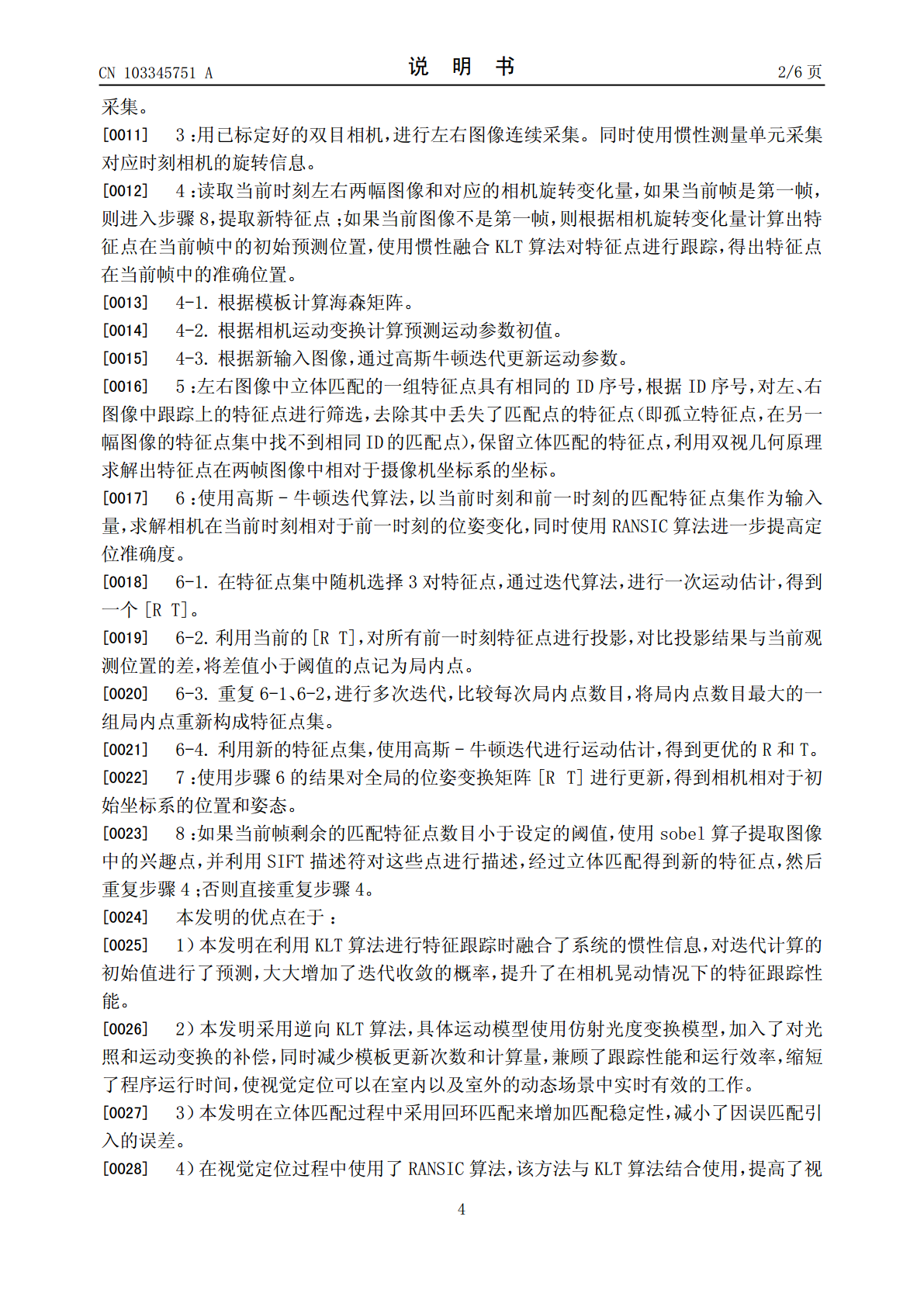
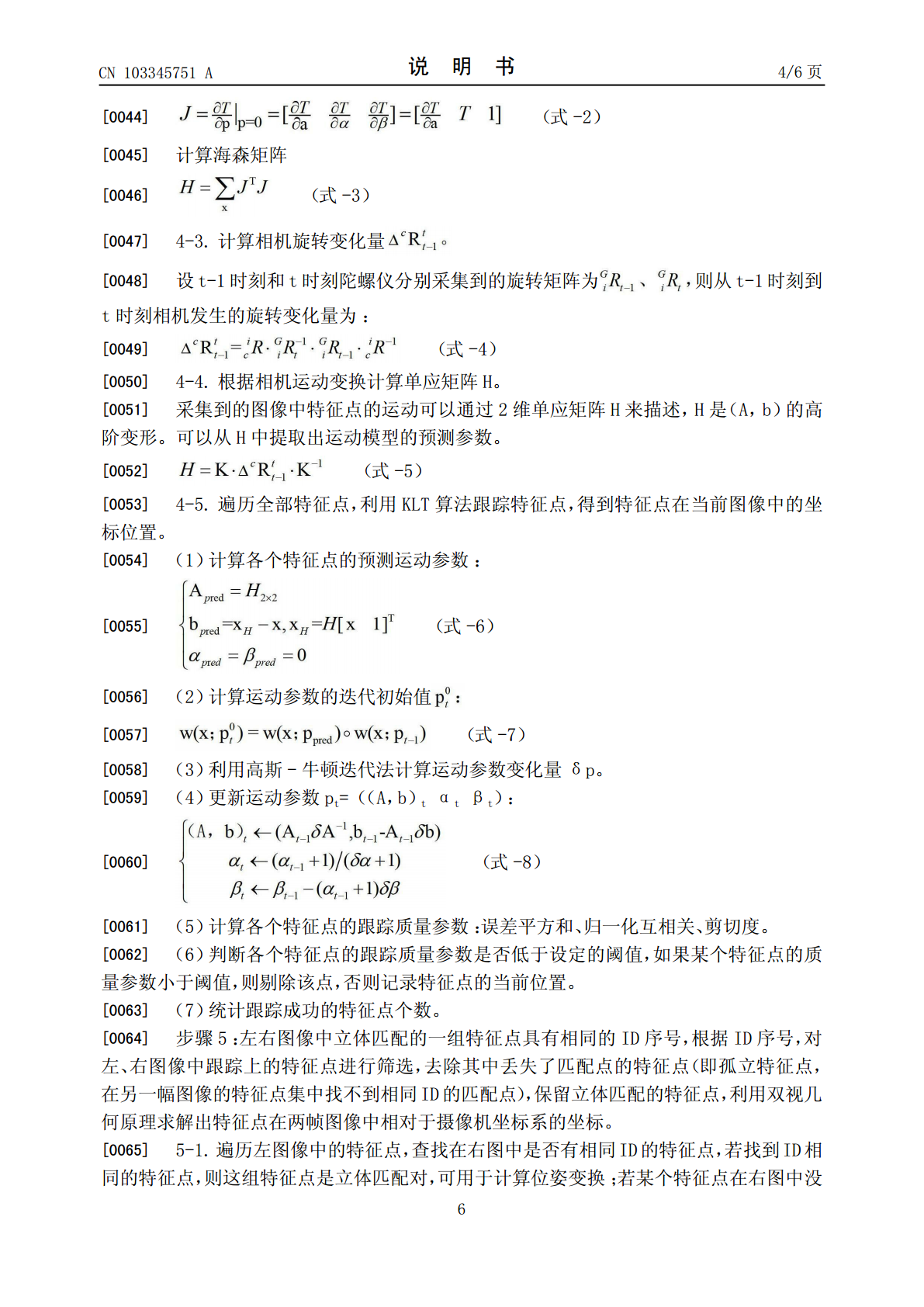
本发明公开了一种基于图像处理及机器视觉的鲁棒特征跟踪与立体视觉定位技术。该技术可以在相机晃动以及室外光照条件下,融合惯性信息和视觉信息,实现可靠的立体视觉定位。通过双目摄像机实时采集图像,同时利用惯性测量单元采集相机旋转信息。利用特征提取算法提取图像中的特征点,并对左右图像中的特征点进行立体匹配。结合惯性信息,通过惯性融合KLT算法跟踪特征点,提高特征跟踪可靠性。利用双视几何原理恢复特征点的三维信息。使用高斯牛顿迭代的方法由特征点位置信息求得相机运动参数。使用RANSIC算法进一步提高视觉定位准确度。整个

基于改进的加速鲁棒特征算法的工件定位方法.docx
基于改进的加速鲁棒特征算法的工件定位方法基于改进的加速鲁棒特征算法的工件定位方法摘要:随着工业自动化技术的发展,工件定位对于制造业的生产效率和质量控制至关重要。本文提出了一种基于改进的加速鲁棒特征算法的工件定位方法。该方法主要由三个主要步骤组成:预处理、特征提取和定位,通过对图像进行预处理,利用改进的加速鲁棒特征算法提取特征,并根据特征进行工件的定位。在实验结果分析中,验证了该方法的有效性和稳定性。关键词:工件定位;预处理;特征提取;加速鲁棒特征算法;稳定性1.引言工业生产中的工件定位是指通过对工件进行准

基于特征和直接法结合的鲁棒视觉SLAM方法.docx
基于特征和直接法结合的鲁棒视觉SLAM方法基于特征和直接法结合的鲁棒视觉SLAM方法摘要:鲁棒视觉SLAM(SimultaneousLocalizationandMapping)方法在机器人导航、增强现实和自动驾驶等领域具有重要的应用价值。传统的视觉SLAM方法主要采用特征点作为关键的地标来进行定位和建图,但在复杂环境下,特征点提取与匹配存在一定的困难性。近年来,直接法在视觉SLAM中得到了广泛的应用,通过使用图像的像素信息进行定位和地图构建,避免了对特征点的依赖。然而,直接法在处理视觉复杂度较高的场景时

一种鲁棒的基于全向视觉的足球机器人自定位方法.docx
一种鲁棒的基于全向视觉的足球机器人自定位方法摘要本文提出了一种基于全向视觉的足球机器人自定位方法。该方法利用机器人装备的全向相机捕捉周围环境的图像,对每一帧图像进行特征提取和匹配,通过运动估计和滤波来确定机器人的位置和姿态。该方法具有鲁棒性的优势,在不同场地和光照条件下都能够取得较好的定位效果。关键词:全向相机;足球机器人;自定位方法;特征匹配;滤波;鲁棒性引言足球机器人是一种集机械、电子、控制等多个领域于一体的智能机器人。它能够像人类一样在狭小的场地内完成足球比赛,并具有较高的协作性和运动控制能力。足球

基于人视觉智能特性的鲁棒目标跟踪方法研究.docx
基于人视觉智能特性的鲁棒目标跟踪方法研究基于人视觉智能特性的鲁棒目标跟踪方法研究摘要:目标跟踪是计算机视觉领域一个重要的问题,能够广泛应用于自动驾驶、视频监控、智能家居等众多领域。然而,在复杂的场景中,目标跟踪面临着许多挑战,包括光照变化、目标形变、遮挡和背景干扰等。为解决这些挑战,本论文基于人视觉智能特性,提出了一种鲁棒的目标跟踪方法。该方法利用目标的形状、颜色和纹理等特征,结合机器学习算法和深度学习网络,实现目标的准确跟踪。1.引言目标跟踪是计算机视觉领域的一个研究热点,它能够实现从图像序列中提取并跟