
介入手术中的激光辅助定位方法和穿刺机器人系统.pdf

是雁****找我


1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
介入手术中的激光辅助定位方法和穿刺机器人系统.pdf
本申请涉及一种介入手术中的激光辅助定位方法和穿刺机器人系统,其中,该方法包括:确定计算机断层成像设备的影像坐标系与穿刺机器人的机械臂坐标系之间的第一坐标变换关系;基于第一坐标变换关系,得到入针点在机械臂坐标系下的入针点坐标;根据穿刺机器人中机械臂坐标系和指示装置坐标系之间的第二坐标变换关系、入针点在机械臂坐标系下的入针点坐标,确定穿刺机器人中激光指示装置的控制参数;第二坐标变换关系由穿刺机器人的结构参数确定;基于激光指示装置的控制参数进行激光辅助定位。通过本申请,解决了相关技术中存在需要完成多个部件之间的

穿刺手术系统和定位导航方法.pdf
本发明涉及一种穿刺手术系统和定位导航方法,手术单元具有第一标记单元,第一标记单元包括至少三个不共线的第一标记,手术单元用于运动至目标对象的目标位置,图像采集单元用于采集包含手术单元和目标对象的图像,控制单元与手术单元通信连接,控制单元用于获取图像,根据图像生成目标位置坐标系和第一标记单元坐标系之间的第一转换关系,并根据第一转换关系控制手术单元运动至目标位置。获取目标位置坐标系和第一标记单元坐标系之间的第一转换关系,即在同一标准下直接建立目标位置和第一标记单元的相对位置关系,如果利用CT设备等存在风险因素的
穿刺手术的引导夹臂、定位组件、机器人及激光准直方法.pdf
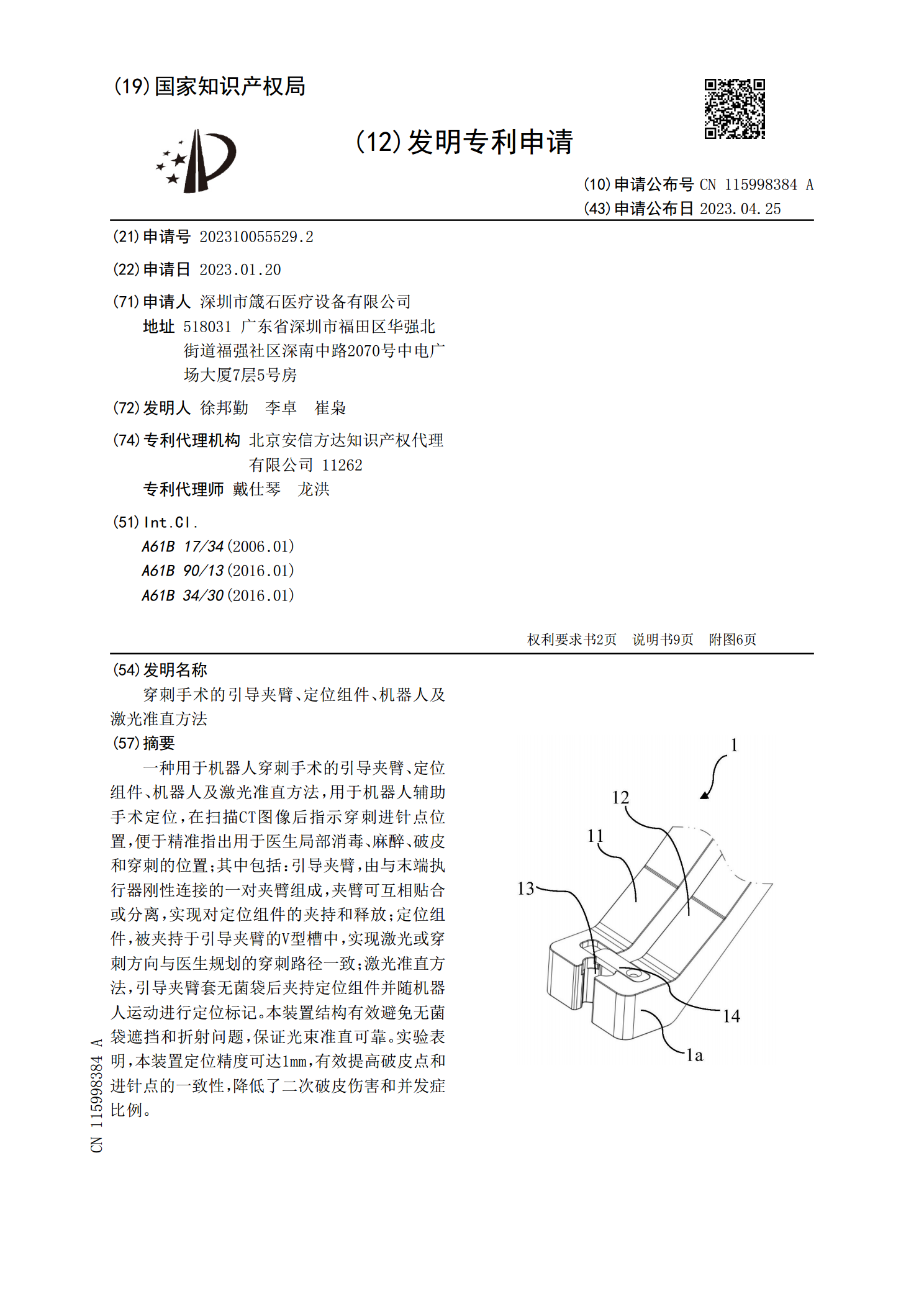
一种用于机器人穿刺手术的引导夹臂、定位组件、机器人及激光准直方法,用于机器人辅助手术定位,在扫描CT图像后指示穿刺进针点位置,便于精准指出用于医生局部消毒、麻醉、破皮和穿刺的位置;其中包括:引导夹臂,由与末端执行器刚性连接的一对夹臂组成,夹臂可互相贴合或分离,实现对定位组件的夹持和释放;定位组件,被夹持于引导夹臂的V型槽中,实现激光或穿刺方向与医生规划的穿刺路径一致;激光准直方法,引导夹臂套无菌袋后夹持定位组件并随机器人运动进行定位标记。本装置结构有效避免无菌袋遮挡和折射问题,保证光束准直可靠。实验表明,
介入手术机器人同步定位与三维地图构建方法和系统.pdf
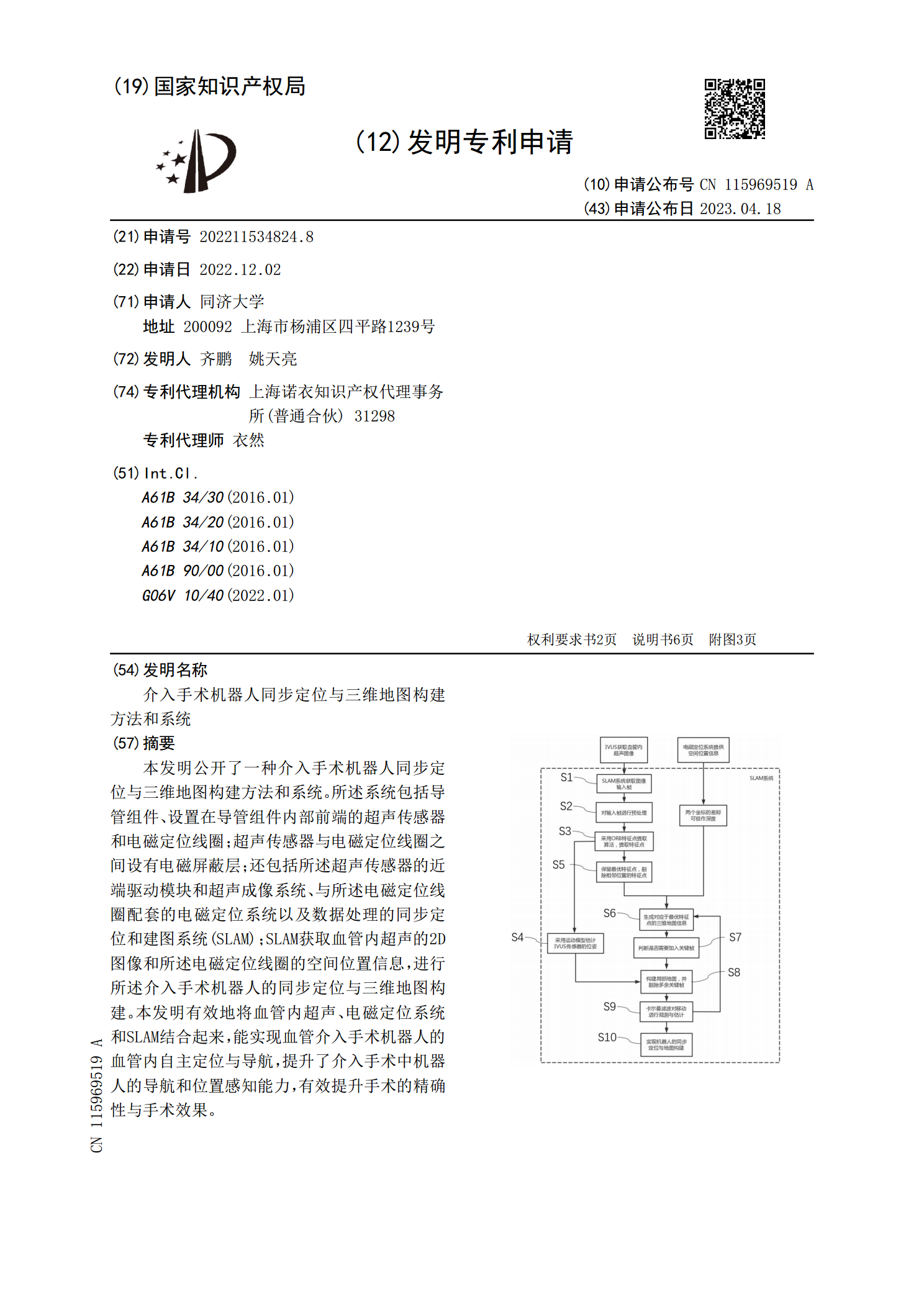
本发明公开了一种介入手术机器人同步定位与三维地图构建方法和系统。所述系统包括导管组件、设置在导管组件内部前端的超声传感器和电磁定位线圈;超声传感器与电磁定位线圈之间设有电磁屏蔽层;还包括所述超声传感器的近端驱动模块和超声成像系统、与所述电磁定位线圈配套的电磁定位系统以及数据处理的同步定位和建图系统(SLAM);SLAM获取血管内超声的2D图像和所述电磁定位线圈的空间位置信息,进行所述介入手术机器人的同步定位与三维地图构建。本发明有效地将血管内超声、电磁定位系统和SLAM结合起来,能实现血管介入手术机器人的
穿刺孔辅助扩张装置及穿刺手术系统.pdf
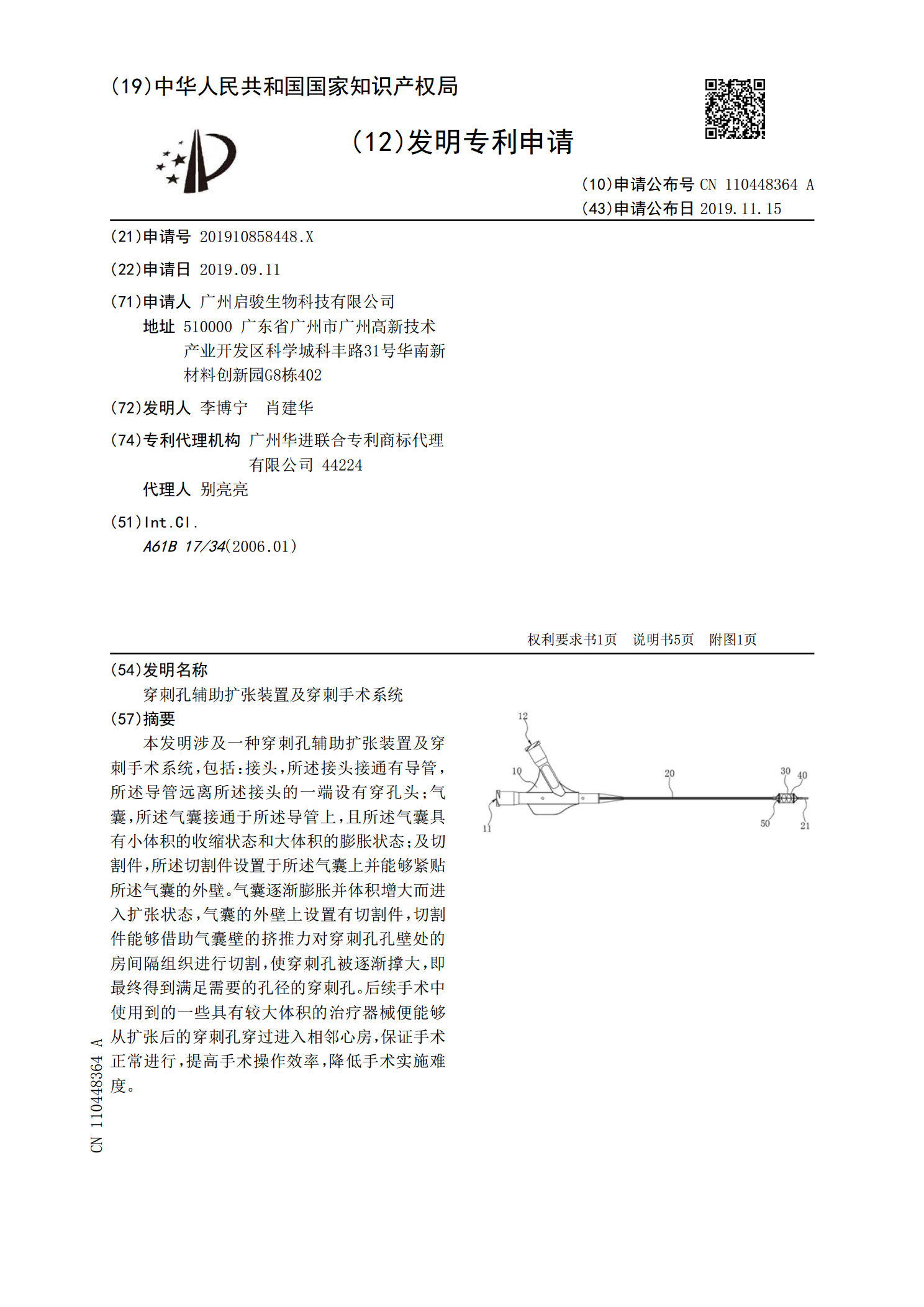
本发明涉及一种穿刺孔辅助扩张装置及穿刺手术系统,包括:接头,所述接头接通有导管,所述导管远离所述接头的一端设有穿孔头;气囊,所述气囊接通于所述导管上,且所述气囊具有小体积的收缩状态和大体积的膨胀状态;及切割件,所述切割件设置于所述气囊上并能够紧贴所述气囊的外壁。气囊逐渐膨胀并体积增大而进入扩张状态,气囊的外壁上设置有切割件,切割件能够借助气囊壁的挤推力对穿刺孔孔壁处的房间隔组织进行切割,使穿刺孔被逐渐撑大,即最终得到满足需要的孔径的穿刺孔。后续手术中使用到的一些具有较大体积的治疗器械便能够从扩张后的穿刺孔