
穿刺手术系统和定位导航方法.pdf

努力****南绿


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

穿刺手术系统和定位导航方法.pdf
本发明涉及一种穿刺手术系统和定位导航方法,手术单元具有第一标记单元,第一标记单元包括至少三个不共线的第一标记,手术单元用于运动至目标对象的目标位置,图像采集单元用于采集包含手术单元和目标对象的图像,控制单元与手术单元通信连接,控制单元用于获取图像,根据图像生成目标位置坐标系和第一标记单元坐标系之间的第一转换关系,并根据第一转换关系控制手术单元运动至目标位置。获取目标位置坐标系和第一标记单元坐标系之间的第一转换关系,即在同一标准下直接建立目标位置和第一标记单元的相对位置关系,如果利用CT设备等存在风险因素的
手术机器人导航定位系统及方法.pdf
本申请公开了一种手术机器人导航定位系统及方法。该系统包括:配准模块,用于根据目标位置的三维骨骼模型中术前规划点在三维模型坐标系下的空间位置、实体目标位置的骨骼上的术中标记点在世界坐标系下的空间位置,以及实体目标位置的骨骼上的划线点集在世界坐标系下的空间位置,对三维骨骼模型进行配准;追踪模块,用于通过手术执行器的多个追踪球,以及骨骼上的多个追踪球,实时获取手术执行器、骨骼在世界坐标系下的空间位置,根据配准结果将其进行坐标转换,得到手术执行器、骨骼在三维模型坐标系下的空间位置;位置调节模块,用于根据得到的空间
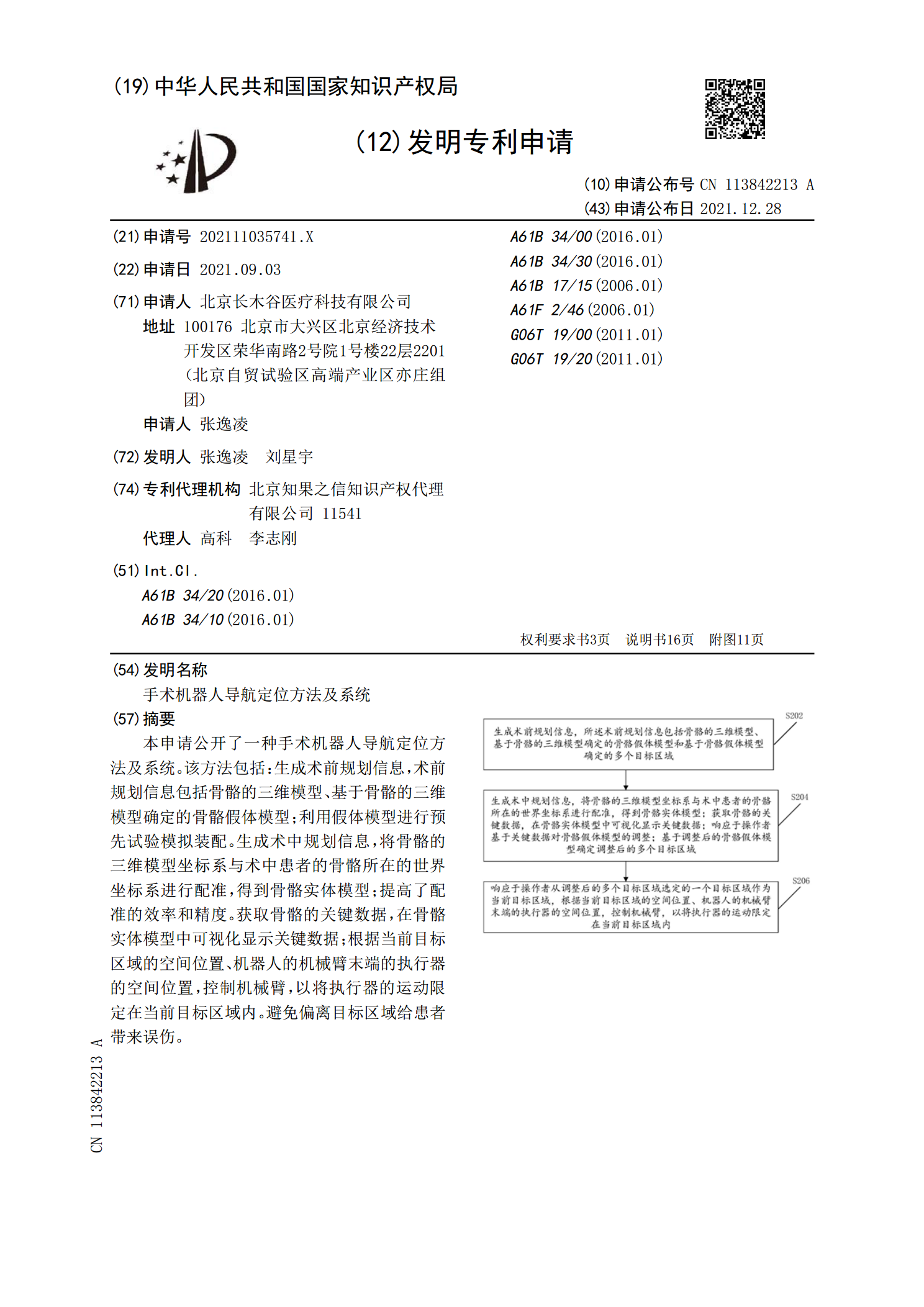
手术机器人导航定位方法及系统.pdf
本申请公开了一种手术机器人导航定位方法及系统。该方法包括:生成术前规划信息,术前规划信息包括骨骼的三维模型、基于骨骼的三维模型确定的骨骼假体模型;利用假体模型进行预先试验模拟装配。生成术中规划信息,将骨骼的三维模型坐标系与术中患者的骨骼所在的世界坐标系进行配准,得到骨骼实体模型;提高了配准的效率和精度。获取骨骼的关键数据,在骨骼实体模型中可视化显示关键数据;根据当前目标区域的空间位置、机器人的机械臂末端的执行器的空间位置,控制机械臂,以将执行器的运动限定在当前目标区域内。避免偏离目标区域给患者带来误伤。
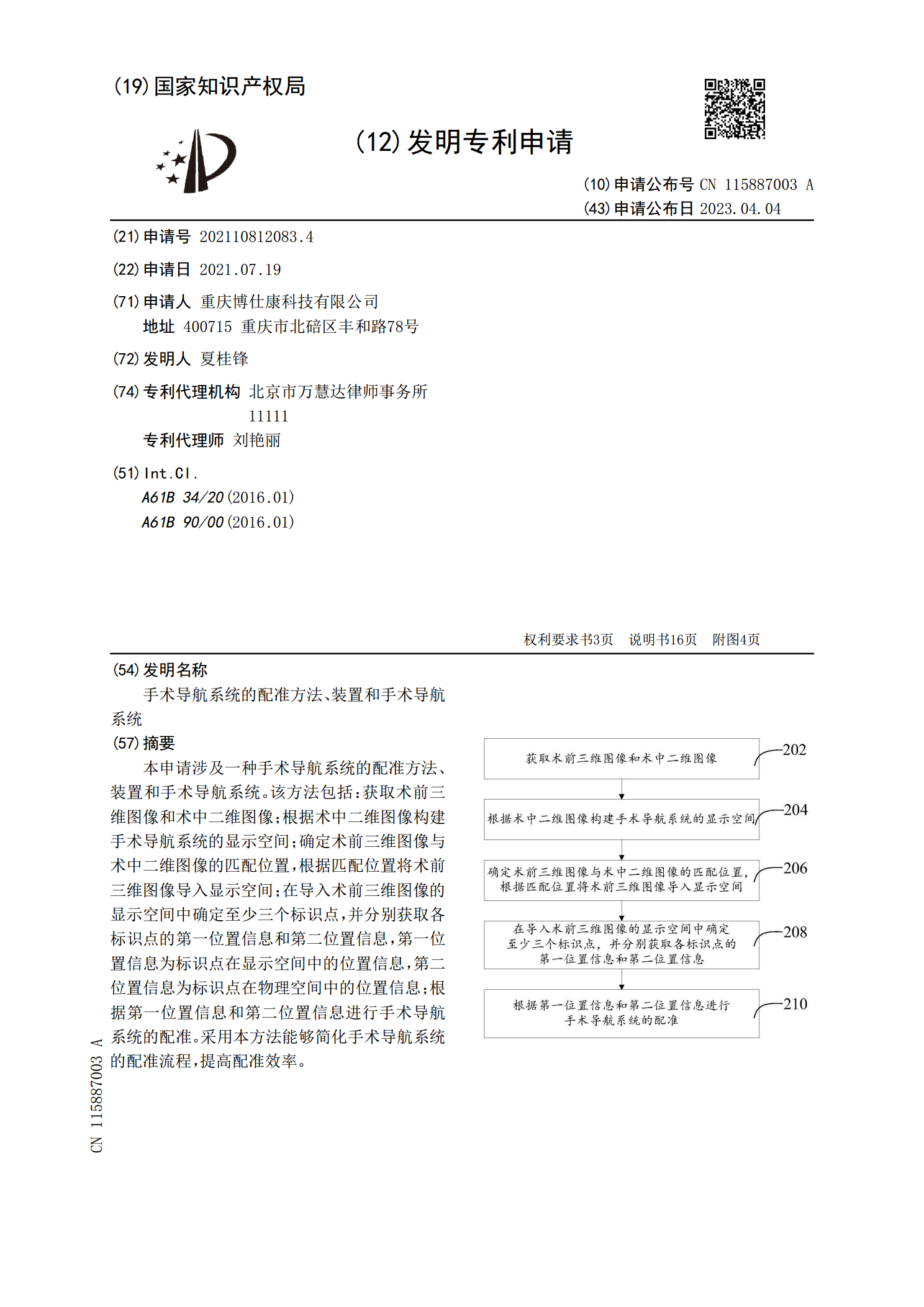
手术导航系统的配准方法、装置和手术导航系统.pdf
本申请涉及一种手术导航系统的配准方法、装置和手术导航系统。该方法包括:获取术前三维图像和术中二维图像;根据术中二维图像构建手术导航系统的显示空间;确定术前三维图像与术中二维图像的匹配位置,根据匹配位置将术前三维图像导入显示空间;在导入术前三维图像的显示空间中确定至少三个标识点,并分别获取各标识点的第一位置信息和第二位置信息,第一位置信息为标识点在显示空间中的位置信息,第二位置信息为标识点在物理空间中的位置信息;根据第一位置信息和第二位置信息进行手术导航系统的配准。采用本方法能够简化手术导航系统的配准流程,
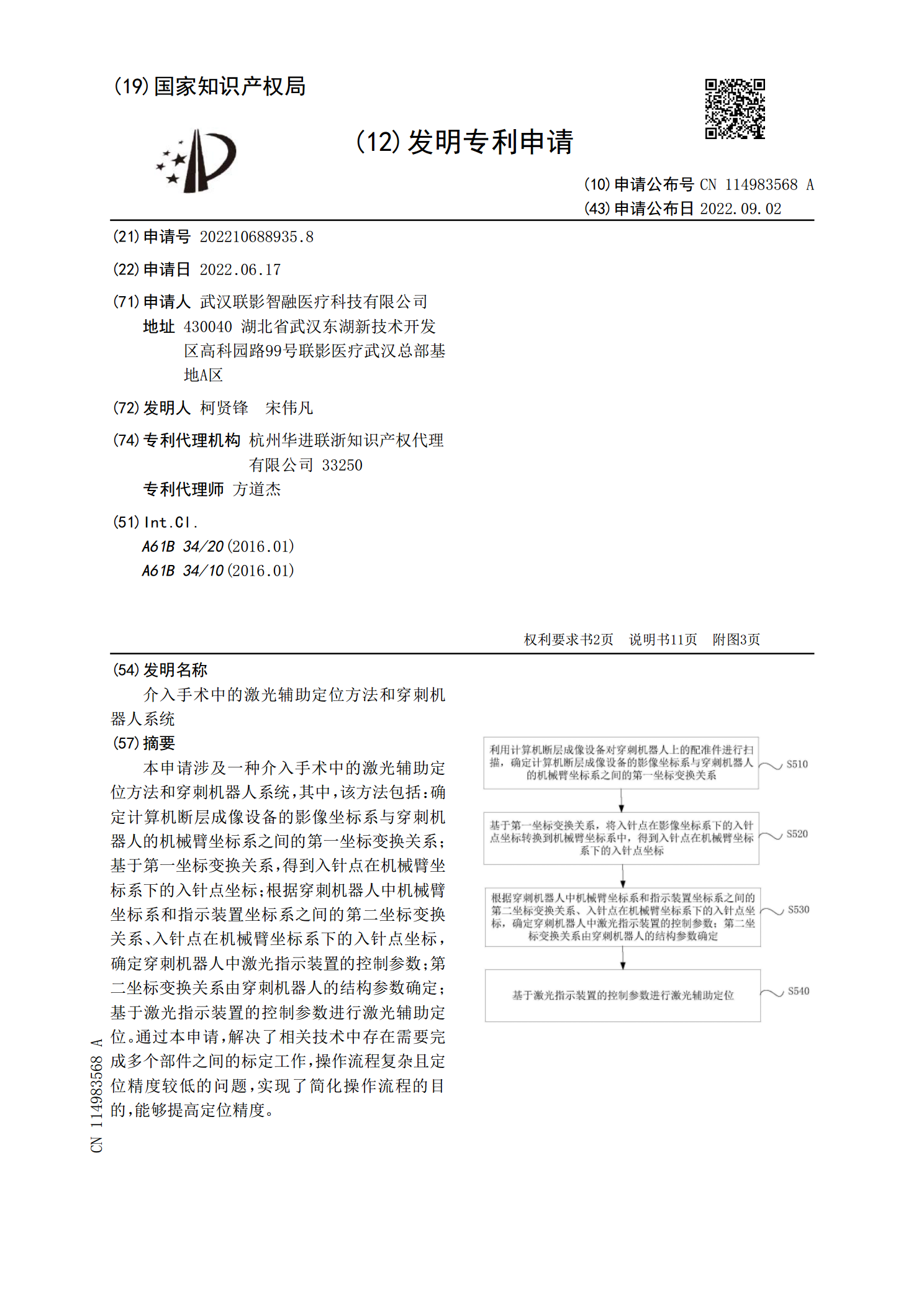
介入手术中的激光辅助定位方法和穿刺机器人系统.pdf
本申请涉及一种介入手术中的激光辅助定位方法和穿刺机器人系统,其中,该方法包括:确定计算机断层成像设备的影像坐标系与穿刺机器人的机械臂坐标系之间的第一坐标变换关系;基于第一坐标变换关系,得到入针点在机械臂坐标系下的入针点坐标;根据穿刺机器人中机械臂坐标系和指示装置坐标系之间的第二坐标变换关系、入针点在机械臂坐标系下的入针点坐标,确定穿刺机器人中激光指示装置的控制参数;第二坐标变换关系由穿刺机器人的结构参数确定;基于激光指示装置的控制参数进行激光辅助定位。通过本申请,解决了相关技术中存在需要完成多个部件之间的