
穿刺手术的引导夹臂、定位组件、机器人及激光准直方法.pdf

映雁****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
穿刺手术的引导夹臂、定位组件、机器人及激光准直方法.pdf
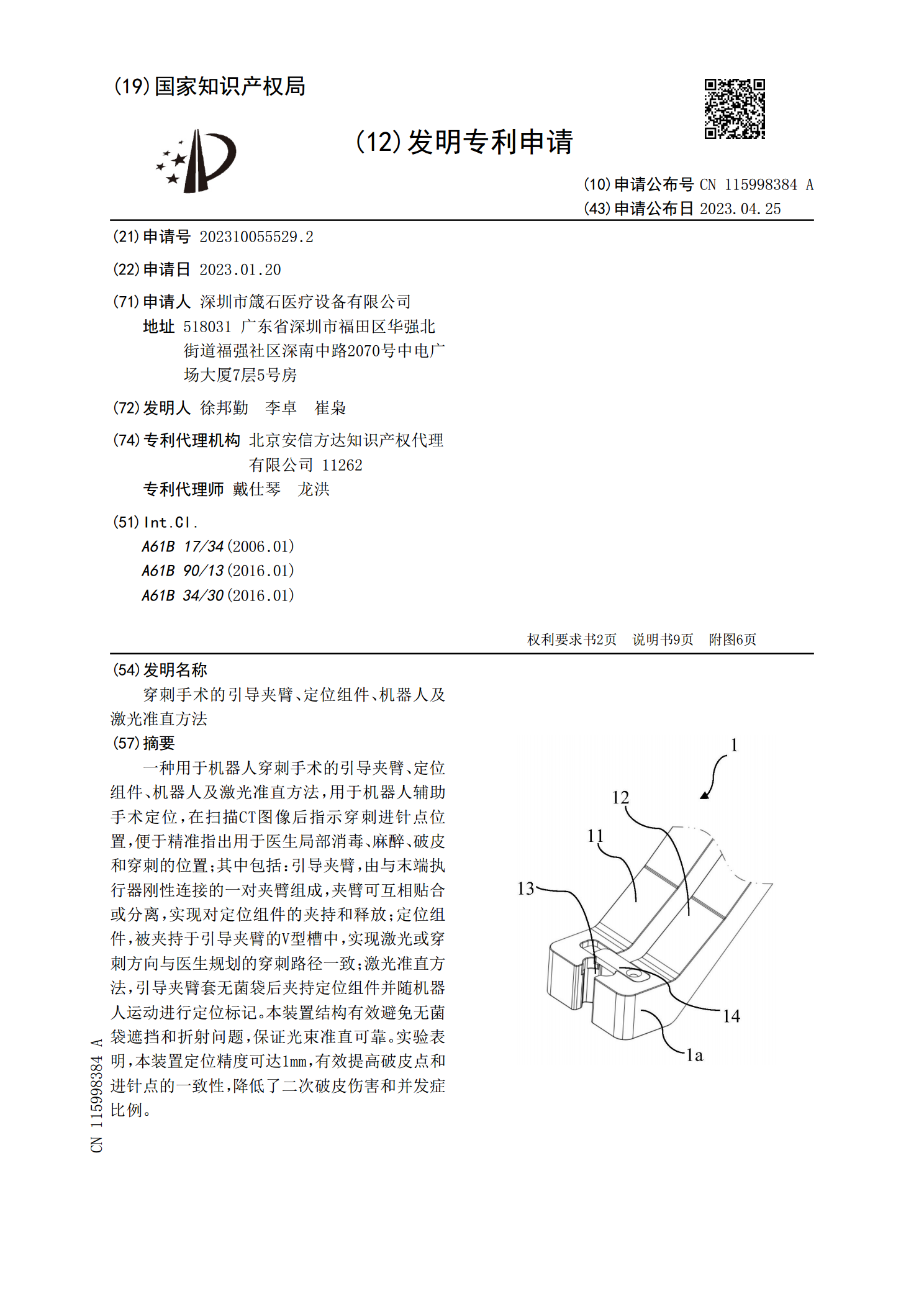
一种用于机器人穿刺手术的引导夹臂、定位组件、机器人及激光准直方法,用于机器人辅助手术定位,在扫描CT图像后指示穿刺进针点位置,便于精准指出用于医生局部消毒、麻醉、破皮和穿刺的位置;其中包括:引导夹臂,由与末端执行器刚性连接的一对夹臂组成,夹臂可互相贴合或分离,实现对定位组件的夹持和释放;定位组件,被夹持于引导夹臂的V型槽中,实现激光或穿刺方向与医生规划的穿刺路径一致;激光准直方法,引导夹臂套无菌袋后夹持定位组件并随机器人运动进行定位标记。本装置结构有效避免无菌袋遮挡和折射问题,保证光束准直可靠。实验表明,
介入手术中的激光辅助定位方法和穿刺机器人系统.pdf
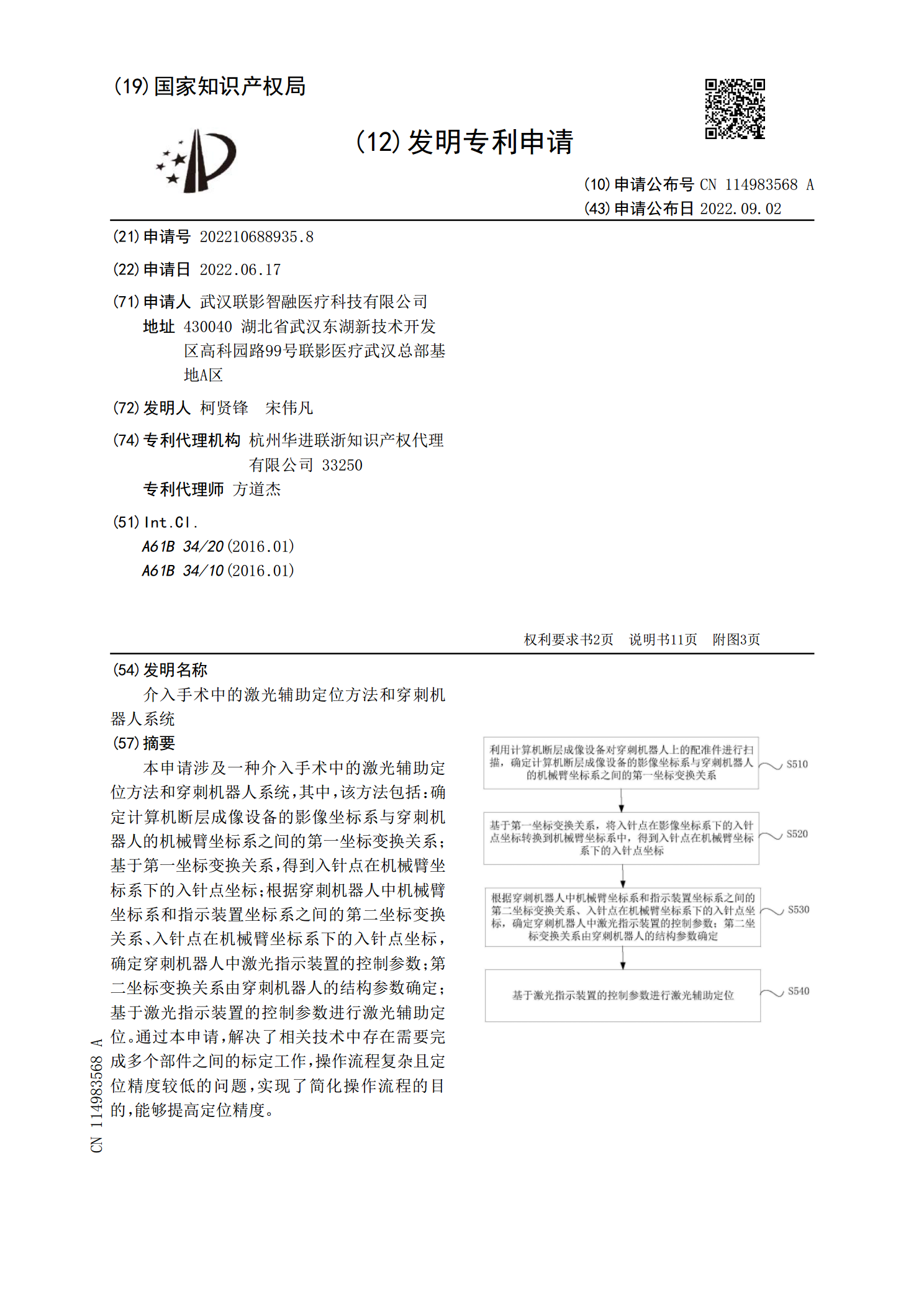
本申请涉及一种介入手术中的激光辅助定位方法和穿刺机器人系统,其中,该方法包括:确定计算机断层成像设备的影像坐标系与穿刺机器人的机械臂坐标系之间的第一坐标变换关系;基于第一坐标变换关系,得到入针点在机械臂坐标系下的入针点坐标;根据穿刺机器人中机械臂坐标系和指示装置坐标系之间的第二坐标变换关系、入针点在机械臂坐标系下的入针点坐标,确定穿刺机器人中激光指示装置的控制参数;第二坐标变换关系由穿刺机器人的结构参数确定;基于激光指示装置的控制参数进行激光辅助定位。通过本申请,解决了相关技术中存在需要完成多个部件之间的

机械臂组件及手术机器人.pdf
本发明公开了一种机械臂组件及手术机器人。机械臂组件包括第一自由臂、第二自由臂、第一球头关节、第二球头关节、第一锁定机构、第二锁定机构以及调节机构。第一自由臂包括第一外臂和第一回拉部件;第二自由臂包括第二外臂和第二回拉部件;第一球头关节包括第一球套和第一球头部;第二球头关节包括第二球套和第二球头部;调节机构包括调节部件、主轴以及推动部件,推动部件设置于主轴上,第一套体和第二套体均套设在主轴上并位于推动部件的外周,且第一回拉部件远离第一球头关节的一端连接在主轴上,第二回拉部件远离第二球头关节的一端连接在主轴上
一种定位引导准确的骨肿瘤手术穿刺定位装置.pdf
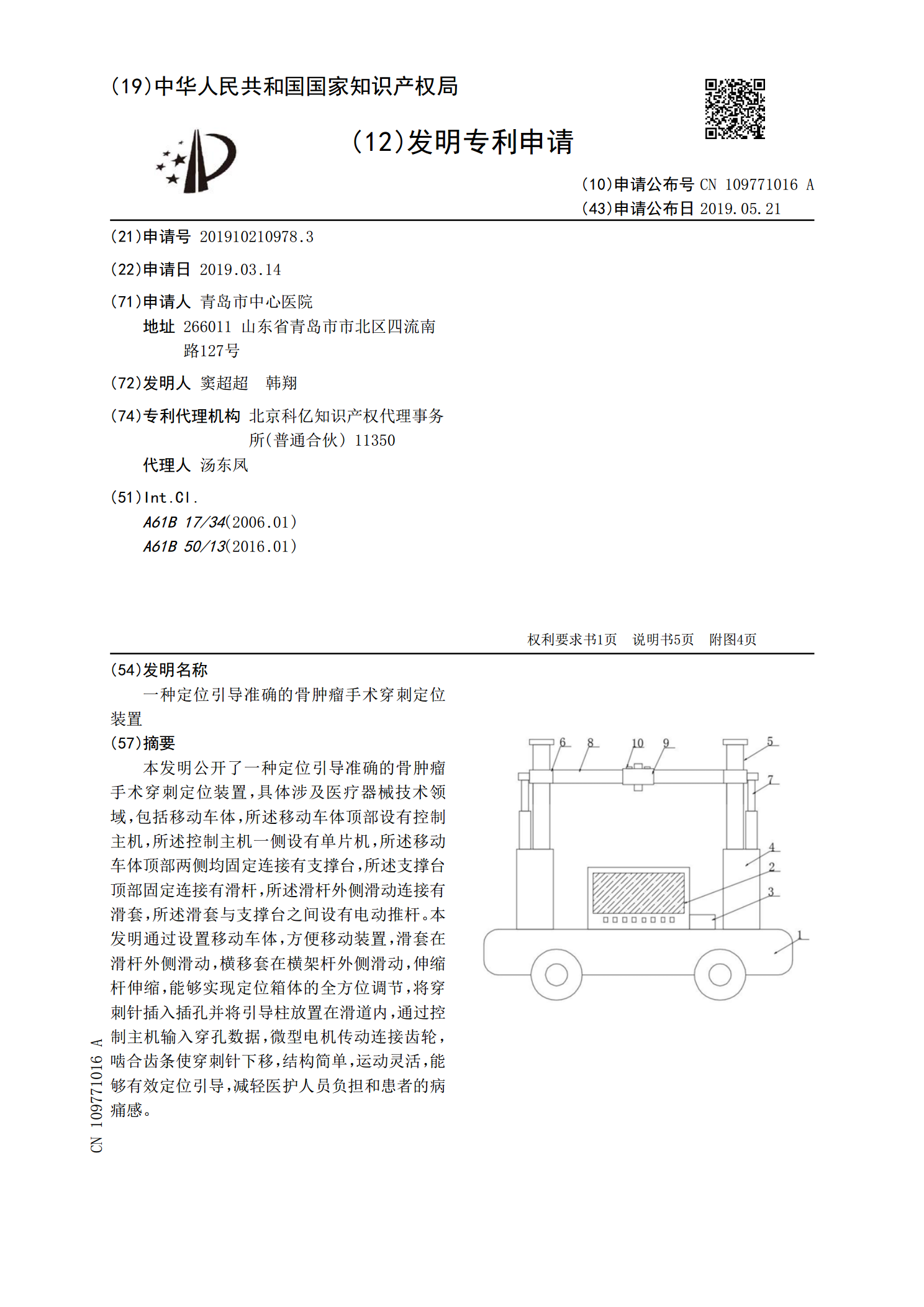
本发明公开了一种定位引导准确的骨肿瘤手术穿刺定位装置,具体涉及医疗器械技术领域,包括移动车体,所述移动车体顶部设有控制主机,所述控制主机一侧设有单片机,所述移动车体顶部两侧均固定连接有支撑台,所述支撑台顶部固定连接有滑杆,所述滑杆外侧滑动连接有滑套,所述滑套与支撑台之间设有电动推杆。本发明通过设置移动车体,方便移动装置,滑套在滑杆外侧滑动,横移套在横架杆外侧滑动,伸缩杆伸缩,能够实现定位箱体的全方位调节,将穿刺针插入插孔并将引导柱放置在滑道内,通过控制主机输入穿孔数据,微型电机传动连接齿轮,啮合齿条使穿刺

基于激光准直的转角定位误差测量与误差模型.docx
基于激光准直的转角定位误差测量与误差模型基于激光准直的转角定位误差测量与误差模型摘要:转角定位是现代工业生产中重要的定位方式之一。激光准直作为一种高精度、非接触式的测量技术,在转角定位中发挥着重要作用。本文以激光准直为基础,研究了转角定位误差测量与误差模型。通过实验方法,测量了转角定位中的误差,并建立了相应的误差模型。实验结果表明,该模型能够较准确地描述转角定位的误差,为准确进行转角定位提供了理论基础和指导。关键词:激光准直,转角定位,误差测量,误差模型1.引言转角定位是工业生产过程中常用的一种定位方式,