
一种无人直升机主桨毂中央件的疲劳试验载荷调试方法.pdf

文库****坚白

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种无人直升机主桨毂中央件的疲劳试验载荷调试方法.pdf
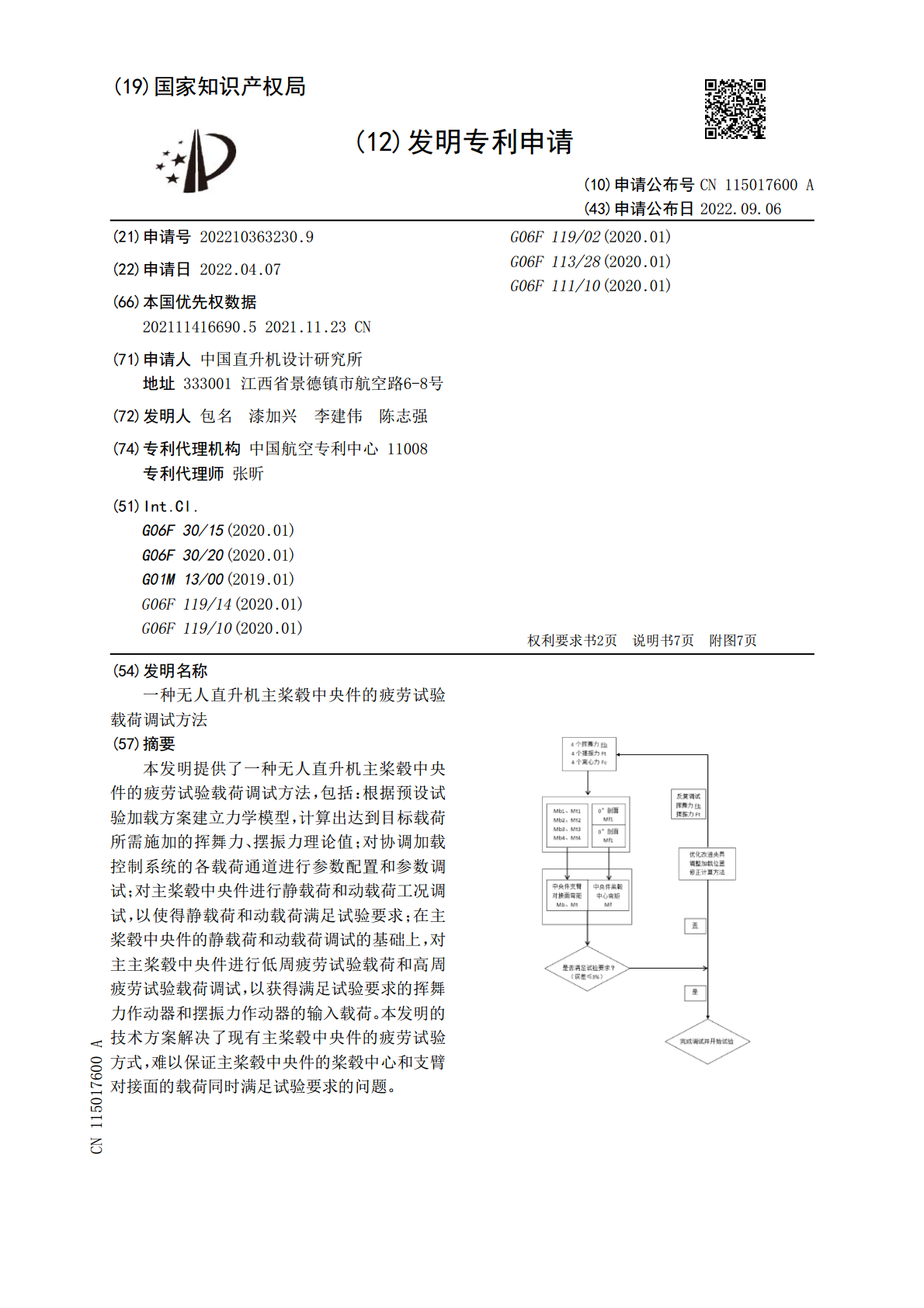
本发明提供了一种无人直升机主桨毂中央件的疲劳试验载荷调试方法,包括:根据预设试验加载方案建立力学模型,计算出达到目标载荷所需施加的挥舞力、摆振力理论值;对协调加载控制系统的各载荷通道进行参数配置和参数调试;对主桨毂中央件进行静载荷和动载荷工况调试,以使得静载荷和动载荷满足试验要求;在主桨毂中央件的静载荷和动载荷调试的基础上,对主主桨毂中央件进行低周疲劳试验载荷和高周疲劳试验载荷调试,以获得满足试验要求的挥舞力作动器和摆振力作动器的输入载荷。本发明的技术方案解决了现有主桨毂中央件的疲劳试验方式,难以保证主桨
一种直升机主桨毂的疲劳试验平台.pdf
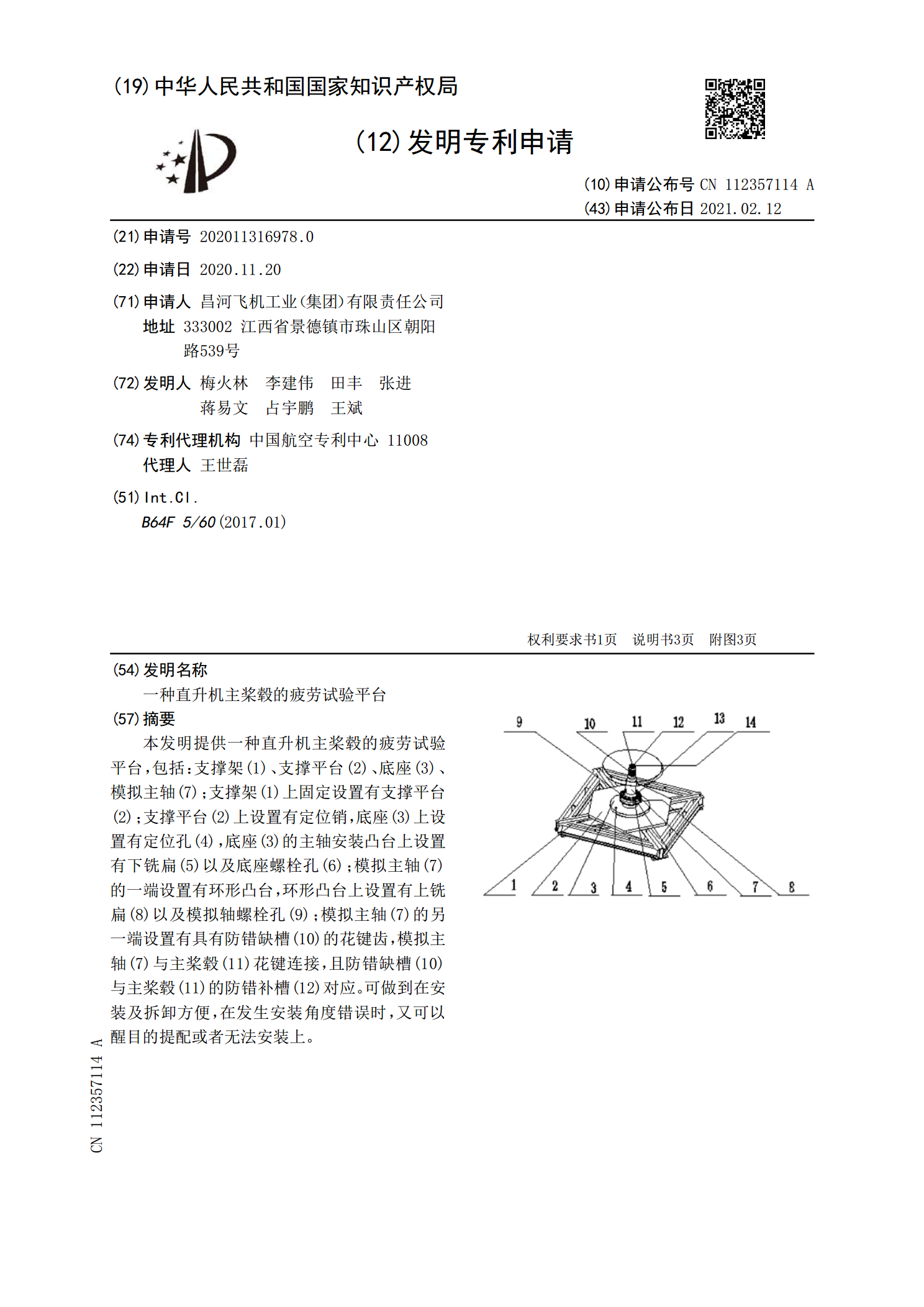
本发明提供一种直升机主桨毂的疲劳试验平台,包括:支撑架(1)、支撑平台(2)、底座(3)、模拟主轴(7);支撑架(1)上固定设置有支撑平台(2);支撑平台(2)上设置有定位销,底座(3)上设置有定位孔(4),底座(3)的主轴安装凸台上设置有下铣扁(5)以及底座螺栓孔(6);模拟主轴(7)的一端设置有环形凸台,环形凸台上设置有上铣扁(8)以及模拟轴螺栓孔(9);模拟主轴(7)的另一端设置有具有防错缺槽(10)的花键齿,模拟主轴(7)与主桨毂(11)花键连接,且防错缺槽(10)与主桨毂(11)的防错补槽(12

一种发动机主轴疲劳试验载荷确定方法.pdf
本发明提供的一种针对发动机轴类零件疲劳试验载荷的确定方法。通过将旋转弯矩载荷等效转换为振动扭矩载荷,解决轴类疲劳试验中旋转弯矩载荷不能在普通疲劳试验机上加载的问题,使得可以使用普通疲劳试验机开展小尺寸的轴类零件疲劳试验,不需要再针对被试轴尺寸进行专门的轴类疲劳试验器设计、重新建设或大量改造,从而降低轴类疲劳试验的成本,也降低了试验载荷加载难度,提高了载荷加载精度。
一种无人直升机的三旋翼尾桨毂.pdf
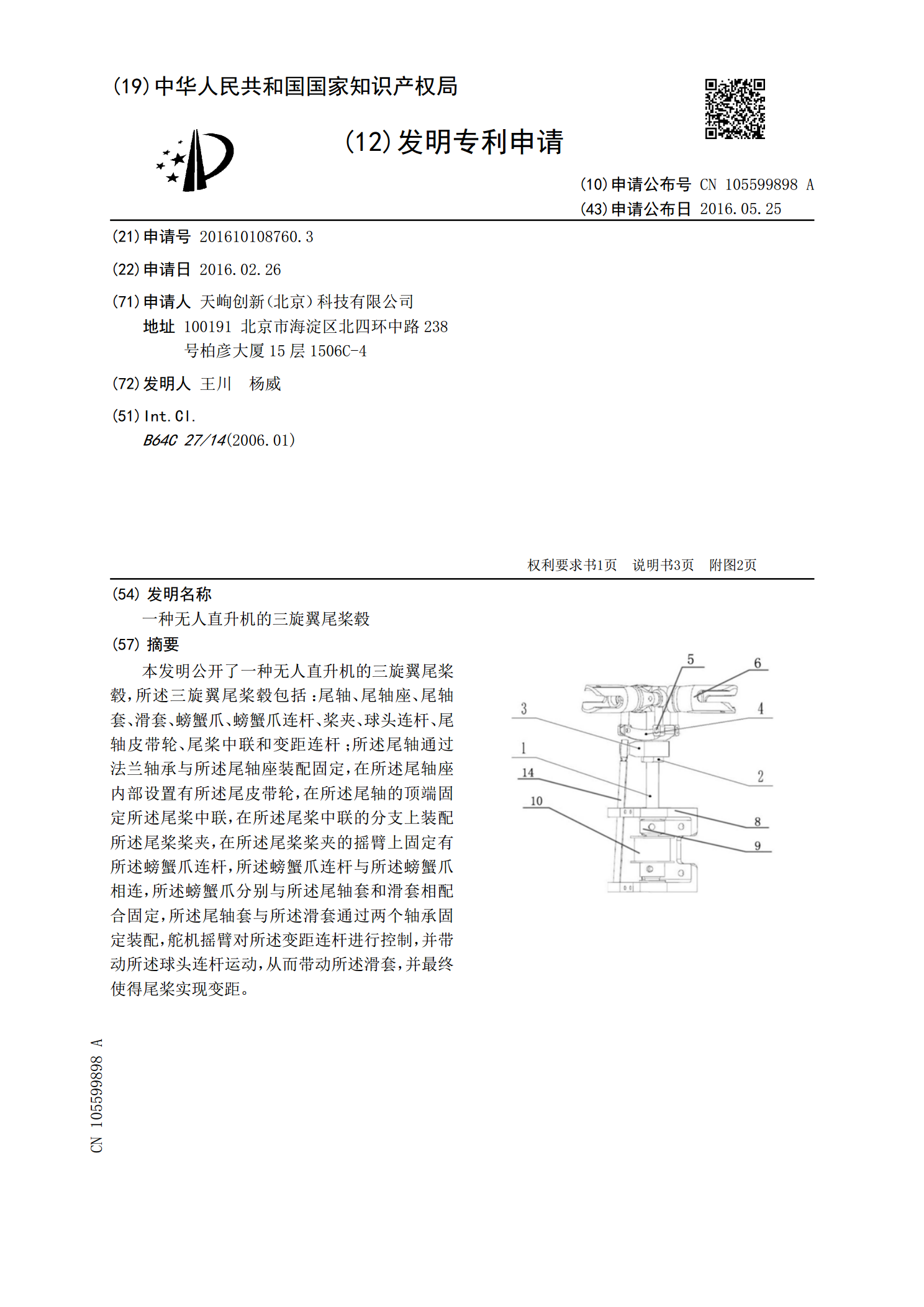
本发明公开了一种无人直升机的三旋翼尾桨毂,所述三旋翼尾桨毂包括:尾轴、尾轴座、尾轴套、滑套、螃蟹爪、螃蟹爪连杆、桨夹、球头连杆、尾轴皮带轮、尾桨中联和变距连杆;所述尾轴通过法兰轴承与所述尾轴座装配固定,在所述尾轴座内部设置有所述尾皮带轮,在所述尾轴的顶端固定所述尾桨中联,在所述尾桨中联的分支上装配所述尾桨桨夹,在所述尾桨桨夹的摇臂上固定有所述螃蟹爪连杆,所述螃蟹爪连杆与所述螃蟹爪相连,所述螃蟹爪分别与所述尾轴套和滑套相配合固定,所述尾轴套与所述滑套通过两个轴承固定装配,舵机摇臂对所述变距连杆进行控制,并带
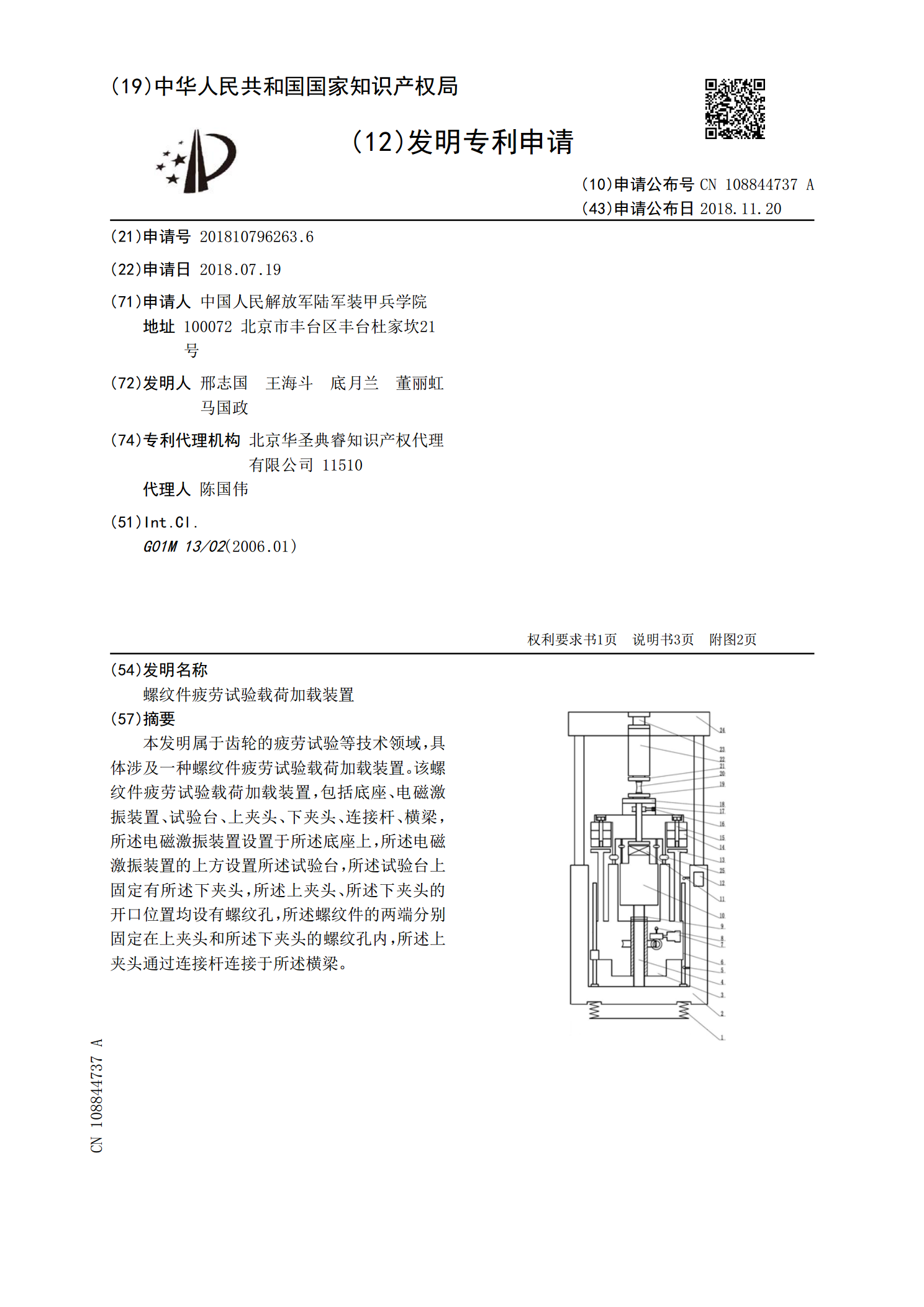
螺纹件疲劳试验载荷加载装置.pdf
本发明属于齿轮的疲劳试验等技术领域,具体涉及一种螺纹件疲劳试验载荷加载装置。该螺纹件疲劳试验载荷加载装置,包括底座、电磁激振装置、试验台、上夹头、下夹头、连接杆、横梁,所述电磁激振装置设置于所述底座上,所述电磁激振装置的上方设置所述试验台,所述试验台上固定有所述下夹头,所述上夹头、所述下夹头的开口位置均设有螺纹孔,所述螺纹件的两端分别固定在上夹头和所述下夹头的螺纹孔内,所述上夹头通过连接杆连接于所述横梁。