
一种步行辅助装置控制方法及其相关设备.pdf

一条****丹淑

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种步行辅助装置控制方法及其相关设备.pdf
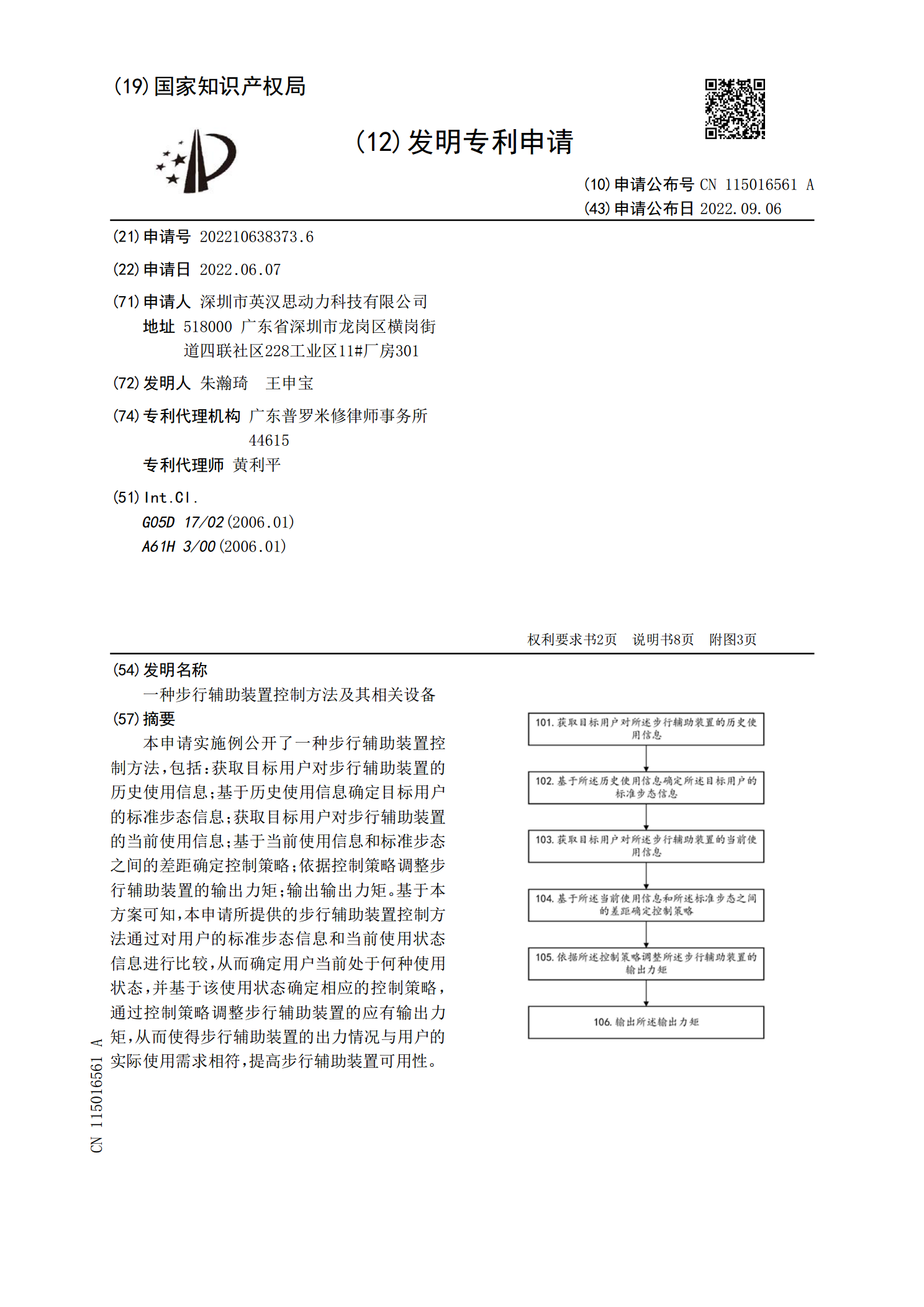
本申请实施例公开了一种步行辅助装置控制方法,包括:获取目标用户对步行辅助装置的历史使用信息;基于历史使用信息确定目标用户的标准步态信息;获取目标用户对步行辅助装置的当前使用信息;基于当前使用信息和标准步态之间的差距确定控制策略;依据控制策略调整步行辅助装置的输出力矩;输出输出力矩。基于本方案可知,本申请所提供的步行辅助装置控制方法通过对用户的标准步态信息和当前使用状态信息进行比较,从而确定用户当前处于何种使用状态,并基于该使用状态确定相应的控制策略,通过控制策略调整步行辅助装置的应有输出力矩,从而使得步行
步行辅助装置及步行辅助装置的控制方法.pdf
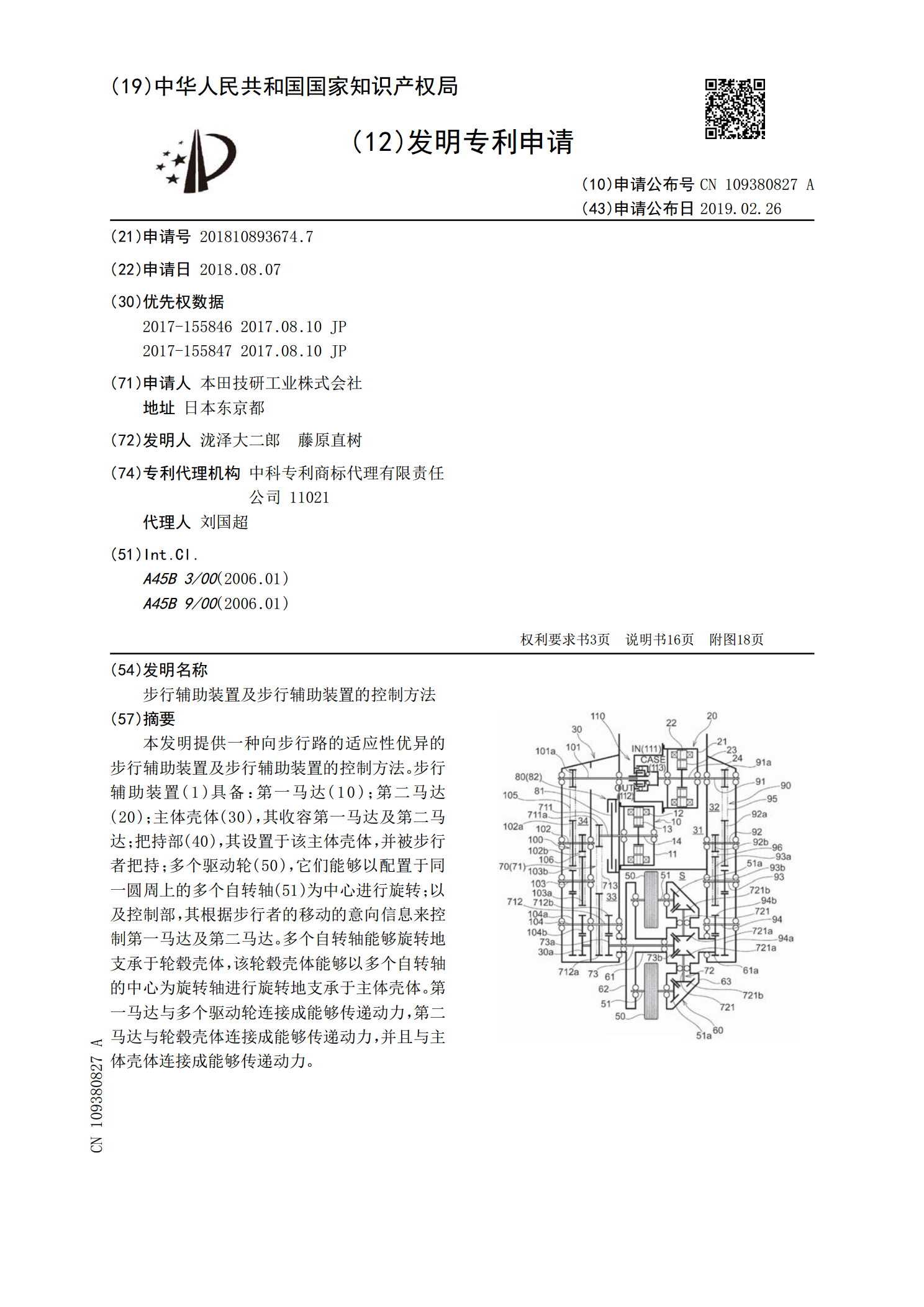
本发明提供一种向步行路的适应性优异的步行辅助装置及步行辅助装置的控制方法。步行辅助装置(1)具备:第一马达(10);第二马达(20);主体壳体(30),其收容第一马达及第二马达;把持部(40),其设置于该主体壳体,并被步行者把持;多个驱动轮(50),它们能够以配置于同一圆周上的多个自转轴(51)为中心进行旋转;以及控制部,其根据步行者的移动的意向信息来控制第一马达及第二马达。多个自转轴能够旋转地支承于轮毂壳体,该轮毂壳体能够以多个自转轴的中心为旋转轴进行旋转地支承于主体壳体。第一马达与多个驱动轮连接成能够

一种辅助步行装置及其助行控制方法.pdf
一种辅助步行装置,包括依次连接的上肢结构部件、后背板部件、下肢驱动部件,所述下肢驱动部件设有2个且镜像分布于后背板部件两侧,其包括依次连接的驱动髋关节、大腿杆以及大腿绑带,所述驱动髋关节上设有连接控制电路板的驱动电机和连接驱动电机的减速增矩部件,所述大腿杆内侧设有用于检测大腿运动方向的IMU传感器,当IMU传感器检测到髋关节角度变化后,将信号传输至控制电路板,所述控制电路板向驱动电机发送启动指令,从而给电机初始驱动电流,使得对应侧腿开始迈出,即进入对应的摆动相阶段,在该阶段,电机驱动电流根据助力需求等级相

一种步行辅助装置.pdf
本发明公开了一种步行辅助装置,属于辅助工具技术领域,包括行走框架,行走框架的底部安装有滚轮,行走框架的两侧分别安装有一组支撑杆,每组支撑杆均包括两根竖向设置的支撑臂和一根横向设置的连接臂,连接臂连接两根支撑臂的上端,支撑臂竖向滑动安装于行走框架上,每根支撑臂的端部均安装有防滑块,每组支撑杆上均设有一根手扶杆,手扶杆的两端固定于两根相应的支撑臂之间,手扶杆上设有竖向延伸的导向杆,行走框架上对应导向杆位置设有导向套管,导向杆插装于导向套管内,导向杆与导向套管之间设有复位弹簧。本发明解决了目前移步车不便移动、定
一种辅助训练装置及其控制方法.pdf
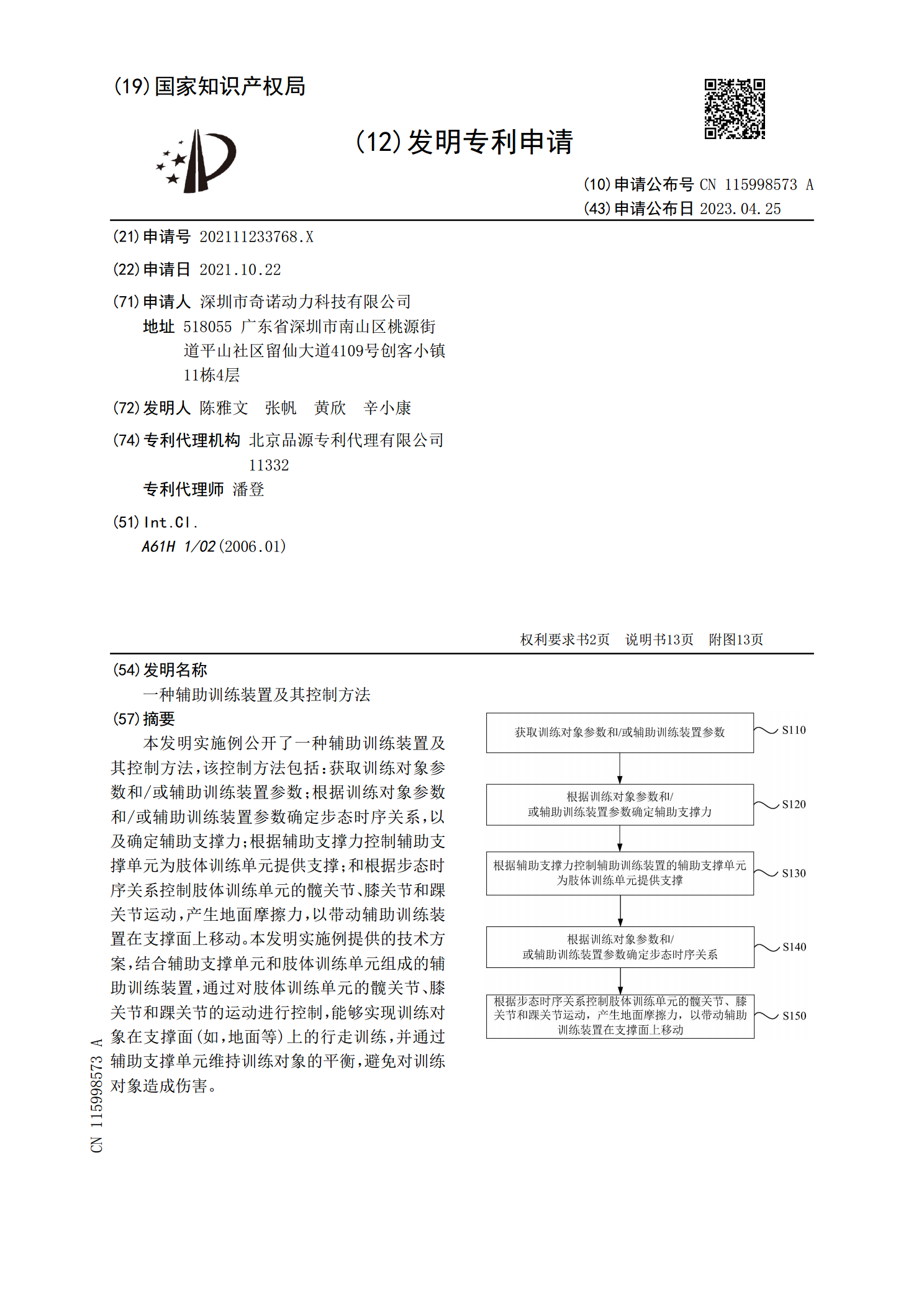
本发明实施例公开了一种辅助训练装置及其控制方法,该控制方法包括:获取训练对象参数和/或辅助训练装置参数;根据训练对象参数和/或辅助训练装置参数确定步态时序关系,以及确定辅助支撑力;根据辅助支撑力控制辅助支撑单元为肢体训练单元提供支撑;和根据步态时序关系控制肢体训练单元的髋关节、膝关节和踝关节运动,产生地面摩擦力,以带动辅助训练装置在支撑面上移动。本发明实施例提供的技术方案,结合辅助支撑单元和肢体训练单元组成的辅助训练装置,通过对肢体训练单元的髋关节、膝关节和踝关节的运动进行控制,能够实现训练对象在支撑面(