
一种多功能智能轮椅.pdf

白真****ng

1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种多功能智能轮椅.pdf
公开了一种多功能智能轮椅,作为医疗服务领域的智能轮椅,肌肉信号控轮椅是一种基于肌机接口技术的新型智能轮椅,具有躲避障碍、自主导航等功能,操作人性化和智能化,并且能够高精度的控制,平稳的操作,同时,该轮椅还具有高端的自主手动操作模式,对于具有自主操作能力的患者也能够轻松操作,具有更加经济性、更高的利用率和高端智能等优点。
一种多功能智能轮椅.pdf
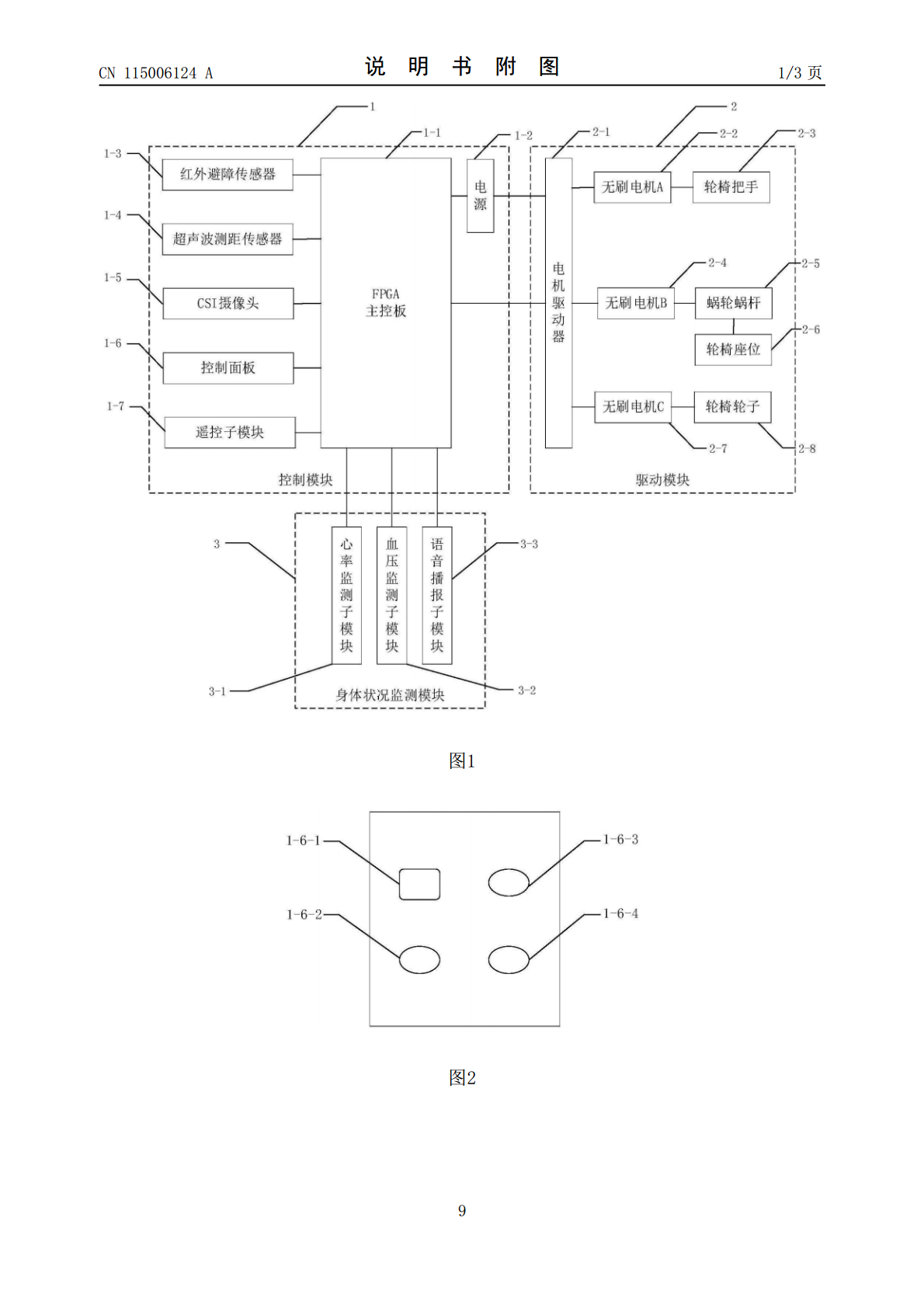
本发明公开了一种多功能智能轮椅。包括控制模块、驱动模块和身体状况监测模块,其中控制模块包含FPGA主控板、电源、红外避障传感器、超声波测距传感器、CSI摄像头、控制面板、遥控子模块;驱动模块包含电机驱动器、无刷电机A、无刷电机B、无刷电机C、轮椅把手、蜗轮蜗杆、轮椅座位、轮椅轮子;身体状况监测模块包含心率监测子模块、血压监测子模块和语音播报子模块。本发明通过多个传感器融合实现自主驾驶功能;通过电机驱动器控制轮椅把手和蜗轮蜗杆实现辅助站立的功能;通过身体状况监测模块实现心率和血压监测的功能。本发明减轻了看护

一种多功能智能轮椅.pdf
本发明提供了一种多功能智能轮椅,包括轮椅主体、轮椅架、运行装置,所述轮椅主体包括靠背、坐垫、小腿靠垫、挡板及脚踏板,所述轮椅架包括扶手、轮椅固定架、固定板及便桶箱,所述运行装置包括前车轮、后车轮、辅助车轮、刹车装置、连接杆、滑块、电控箱及蓄电池,所述靠背包括靠背主体、插、扣、第一滑动轨道、把手、拉手、第一旋转轴和第一电机,所述便桶箱包括便桶箱外壳、便桶、电子移门和第二传感器,本发明结构简单、功能齐全,且智能化程度高,实现了使用者对轮椅的自行控制,同时解决了使用者上厕所不方便的问题,并在轮椅摔倒时能自动报警

一种多功能智能轮椅.pdf
一种多功能智能轮椅,属于机械领域。该多功能智能轮椅包括座椅、如厕机构、升降机构、行走机构、躯体运动机构和按摩机构。行走机构通过平衡轮8个轮瓣伸缩实现上下楼梯;如厕机构通过座椅旋转180°,支撑架及轮椅座椅上升,便于轮椅行至坐便上方以完成如厕功能;按摩机构通过轮椅背部,颈部按摩头及其运动机构实现按摩功能;躯体运动机构通过四杆机构实现座椅靠背角度的调节,放腿板角度的调节以及骑行机构来锻炼身体;轮椅附加有自动充电功能,小桌板,控制平板等辅助机构。本发明扩大了使用者的活动范围,能提供躯体运动及按摩功能,性能安全、
一种多功能智能轮椅系统.pdf
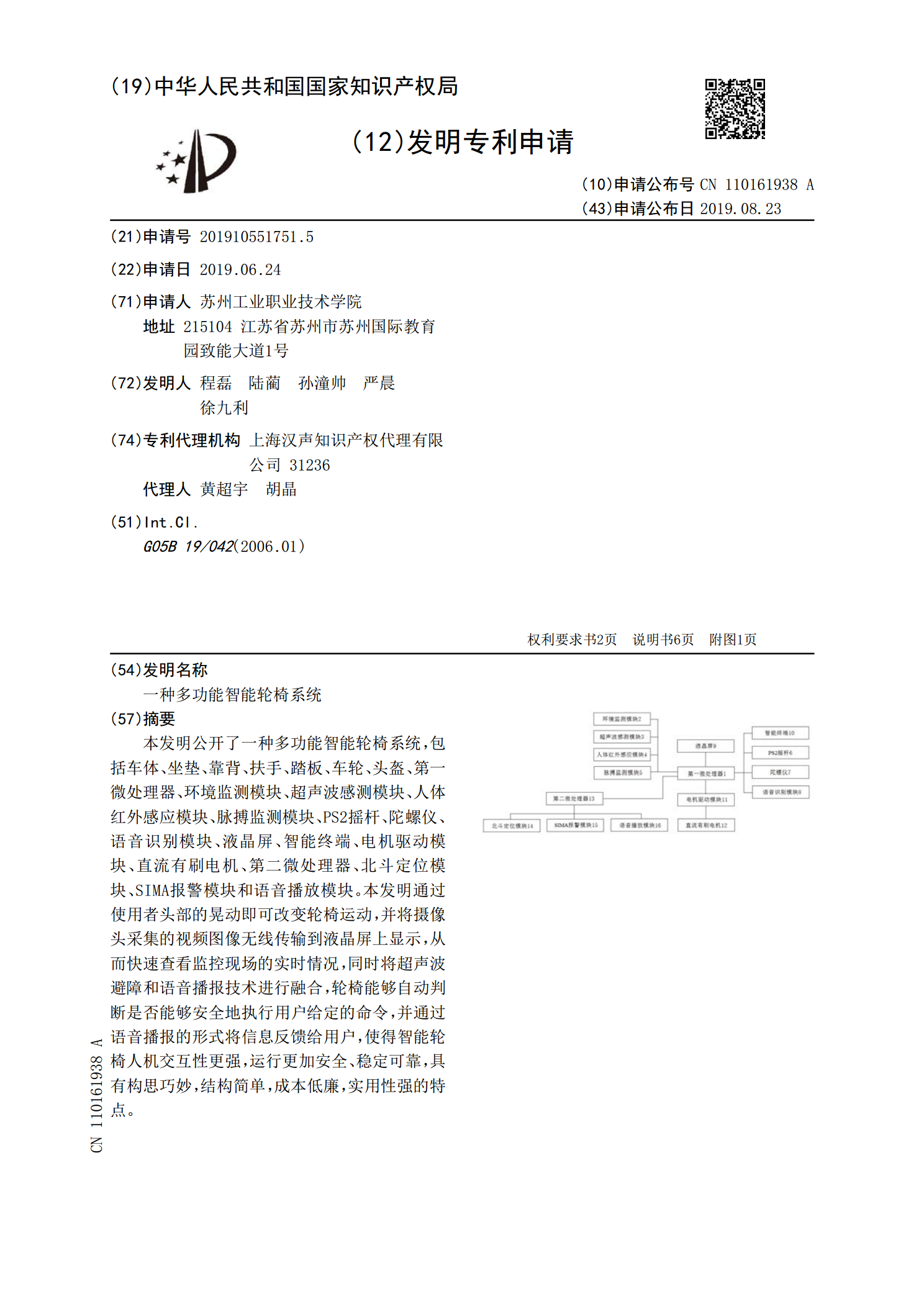
本发明公开了一种多功能智能轮椅系统,包括车体、坐垫、靠背、扶手、踏板、车轮、头盔、第一微处理器、环境监测模块、超声波感测模块、人体红外感应模块、脉搏监测模块、PS2摇杆、陀螺仪、语音识别模块、液晶屏、智能终端、电机驱动模块、直流有刷电机、第二微处理器、北斗定位模块、SIMA报警模块和语音播放模块。本发明通过使用者头部的晃动即可改变轮椅运动,并将摄像头采集的视频图像无线传输到液晶屏上显示,从而快速查看监控现场的实时情况,同时将超声波避障和语音播报技术进行融合,轮椅能够自动判断是否能够安全地执行用户给定的命令