
一种多无人机灾情探测方法及系统.pdf

盼易****君a


1/10
2/10

3/10
4/10
5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种多无人机灾情探测方法及系统.pdf
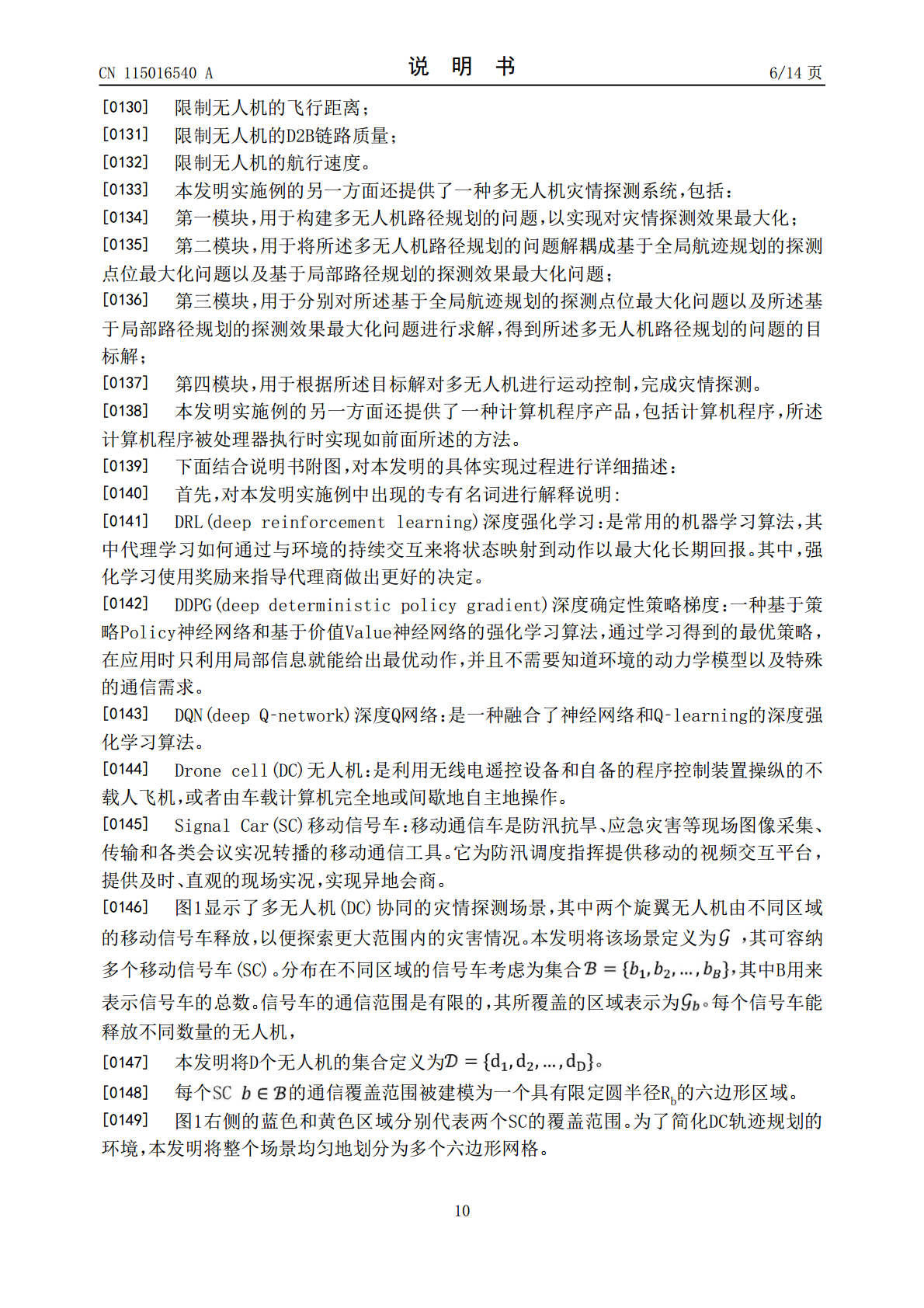
本发明公开了一种多无人机灾情探测方法及系统,方法包括:构建多无人机路径规划的问题,以实现对灾情探测效果最大化;将所述多无人机路径规划的问题解耦成基于全局航迹规划的探测点位最大化问题以及基于局部路径规划的探测效果最大化问题;分别对所述基于全局航迹规划的探测点位最大化问题以及所述基于局部路径规划的探测效果最大化问题进行求解,得到所述多无人机路径规划的问题的目标解;根据所述目标解对多无人机进行运动控制,完成灾情探测。本发明提高了探测效率,且降低了复杂性,可广泛应用于人工智能技术领域。
基于TDOA探测定位的多无人机资源调度方法、系统及设备.pdf
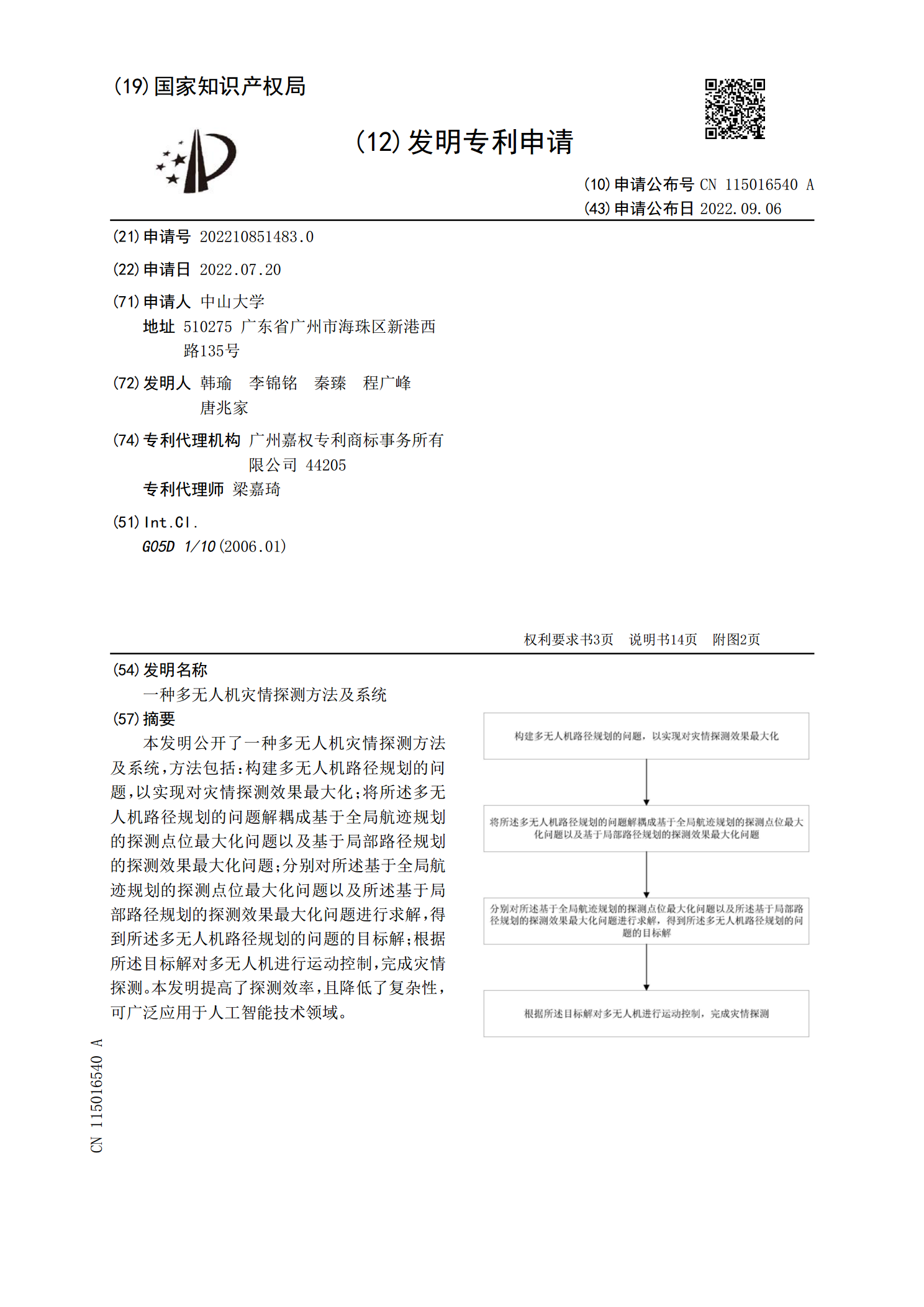
本发明提供了一种基于TDOA探测定位的多无人机资源调度方法、系统及设备,方法包括:获取无人机监测区域范围内的无人机的飞行密度;设置无人机监测区域范围内的各TDOA站点的扫描频率和扫描时间周期;并对无线电信号进行扫描形成表征了所述无线电信号的对应的TDOA站点和所述无线电信号所对应的扫描频率的第一目标数据;根据所述第一目标数据,确定继续跟踪所述无线电信号的当前TDOA选定站点;所述当前TDOA选定站点继续对所述无线电信号进行接收,并继续形成第二目标数据;根据不同时间形成的第二目标数据预测无人机的飞行轨迹;依
基于TDOA探测定位的多无人机部署站点规划方法、系统及设备.pdf
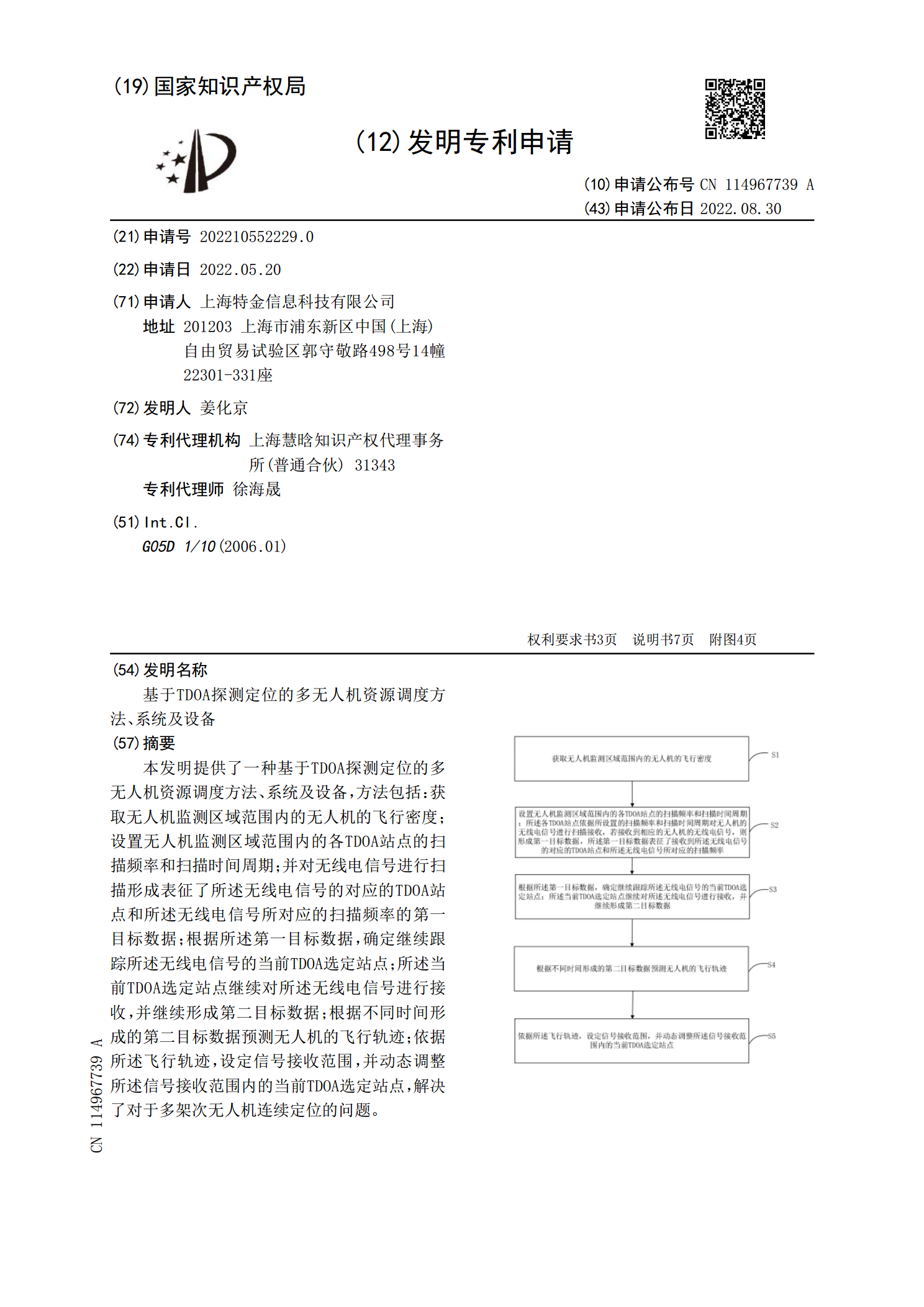
本发明提供了一种基于TDOA探测定位的多无人机部署站点规划方法、系统及设备,其中,方法包括:获取无人机监测区域范围内的无人机的飞行密度,其中,所述飞行密度表征了单位面积和单位时间内同时飞行的无人机数量;根据地形确定所述监测区域范围内的电磁传播衰减程度;确定所述监测区域范围内的无人机干扰信号的干扰强度,所述干扰强度表征了无人机干扰信号的平均功率谱密度;对所述监测区域按照保护目标情况进行等级分类;根据所述监测区域范围内的无人机的飞行密度、电磁传播衰减程度、无人机干扰信号的干扰强度以及等级分类,确定TDOA站点

一种多无人机系统事件触发安全控制方法及系统.pdf
本公开提供了一种多无人机系统事件触发安全控制方法及系统,涉及自动控制技术领域,包括获取多无人机通信网络的拓扑结构,建立无人机领导者和跟随者的动力学方程;根据通信网络的拓扑结构,每个无人机设置邻居的估计器的动态方程,定义触发间隔采样误差并设计分布式事件触发通信策略以及时间触发的间隔;根据设计的估计器和分布式事件触发通信策略,设计基于网络拓扑关系的一致性控制协议;根据设计的分布式事件触发通信策略,设计估计器和控制器的切换策略,并以最后一次成功通信获得的信息作为估计器状态的初值,并进行仿真验证;本公开克服了多无
一种多无人机的虚实结合仿真方法、装置及系统.pdf
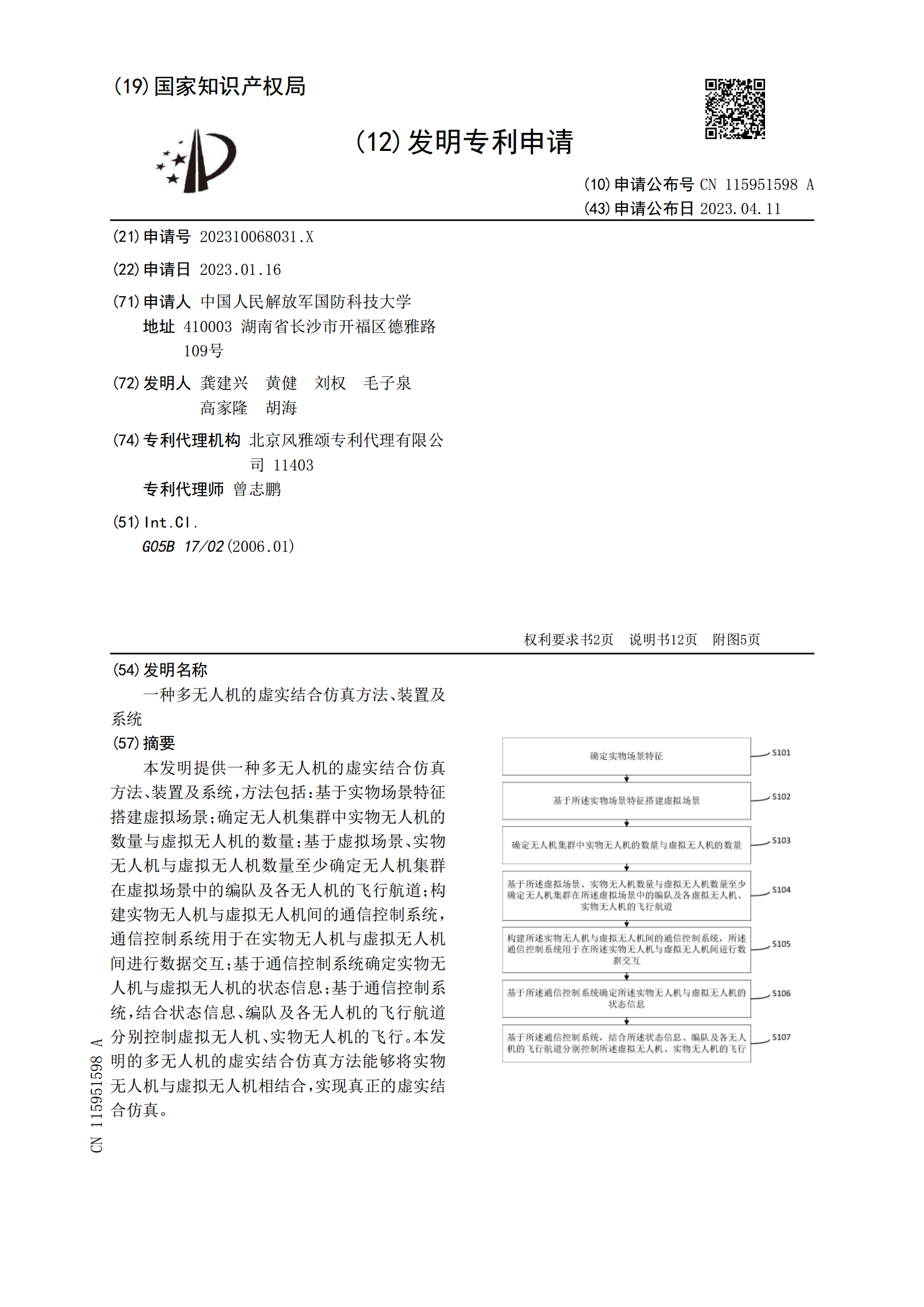
本发明提供一种多无人机的虚实结合仿真方法、装置及系统,方法包括:基于实物场景特征搭建虚拟场景;确定无人机集群中实物无人机的数量与虚拟无人机的数量;基于虚拟场景、实物无人机与虚拟无人机数量至少确定无人机集群在虚拟场景中的编队及各无人机的飞行航道;构建实物无人机与虚拟无人机间的通信控制系统,通信控制系统用于在实物无人机与虚拟无人机间进行数据交互;基于通信控制系统确定实物无人机与虚拟无人机的状态信息;基于通信控制系统,结合状态信息、编队及各无人机的飞行航道分别控制虚拟无人机、实物无人机的飞行。本发明的多无人机的