
一种多无人机的虚实结合仿真方法、装置及系统.pdf

雨巷****怡轩

1/10

2/10

3/10

4/10
5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种多无人机的虚实结合仿真方法、装置及系统.pdf
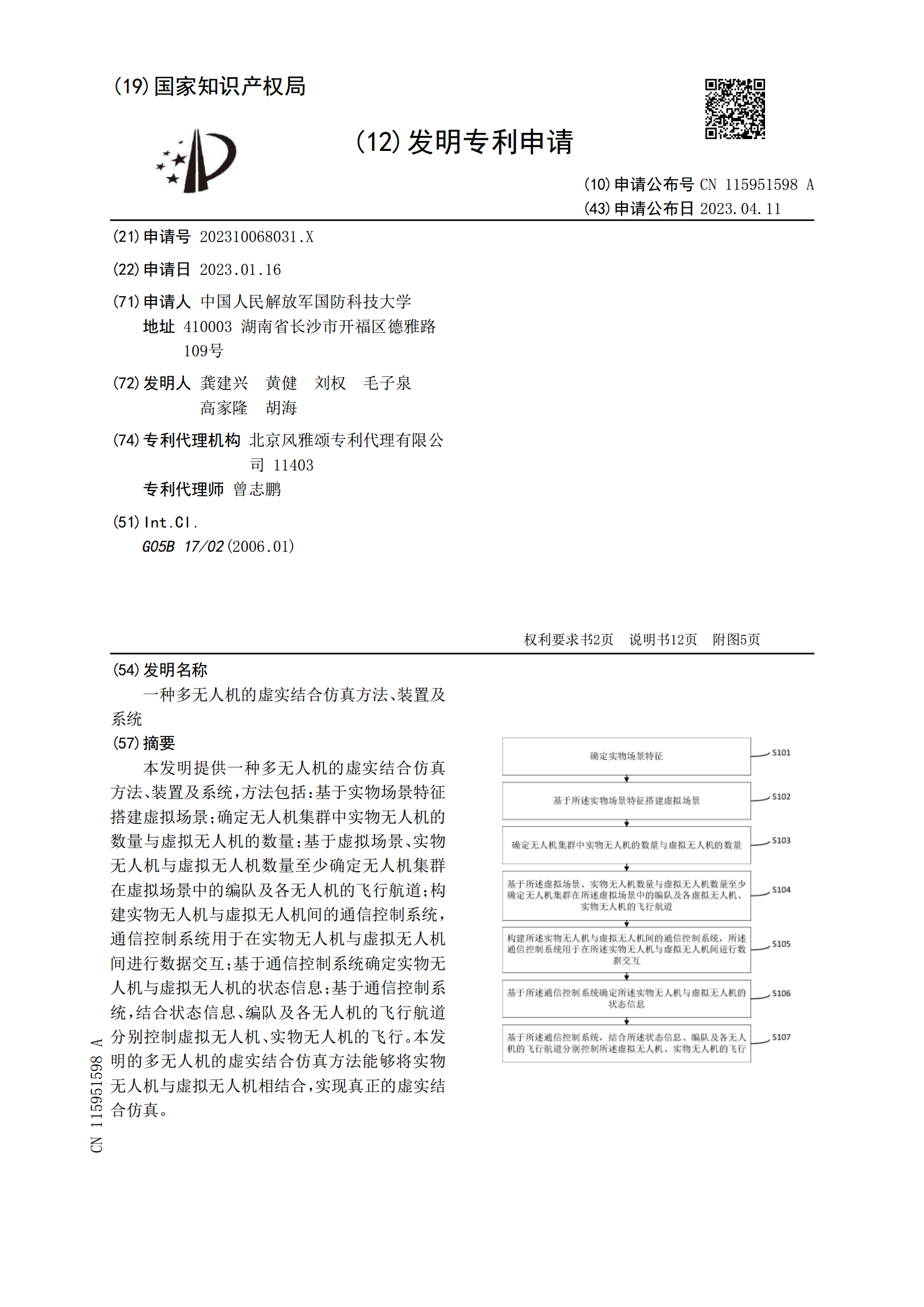
本发明提供一种多无人机的虚实结合仿真方法、装置及系统,方法包括:基于实物场景特征搭建虚拟场景;确定无人机集群中实物无人机的数量与虚拟无人机的数量;基于虚拟场景、实物无人机与虚拟无人机数量至少确定无人机集群在虚拟场景中的编队及各无人机的飞行航道;构建实物无人机与虚拟无人机间的通信控制系统,通信控制系统用于在实物无人机与虚拟无人机间进行数据交互;基于通信控制系统确定实物无人机与虚拟无人机的状态信息;基于通信控制系统,结合状态信息、编队及各无人机的飞行航道分别控制虚拟无人机、实物无人机的飞行。本发明的多无人机的
一种虚实结合的数据链组网仿真系统及实现方法.pdf
本发明公开了一种虚实结合的数据链组网仿真系统及实现方法,所述虚实结合的数据链组网仿真系统,包括:收发装置,用于对数据链模拟模块进行启动控制以及对组网参数进行设置;指挥引导与目标模拟模块,用于生成模拟命令,以及用于设置模拟目标信息,并发送至显控模块;显控模块,包括画面组织模块,前台显示装置,以及后台逻辑处理模块;数据链模拟模块,用于连接本地设备的显控系统和收发装置。本发明仿真系统及实现方法,降低训练成本,实现灵活,采用网络通信系统稳定性也得到增强。
一种虚实结合的集群仿真对抗系统.pdf
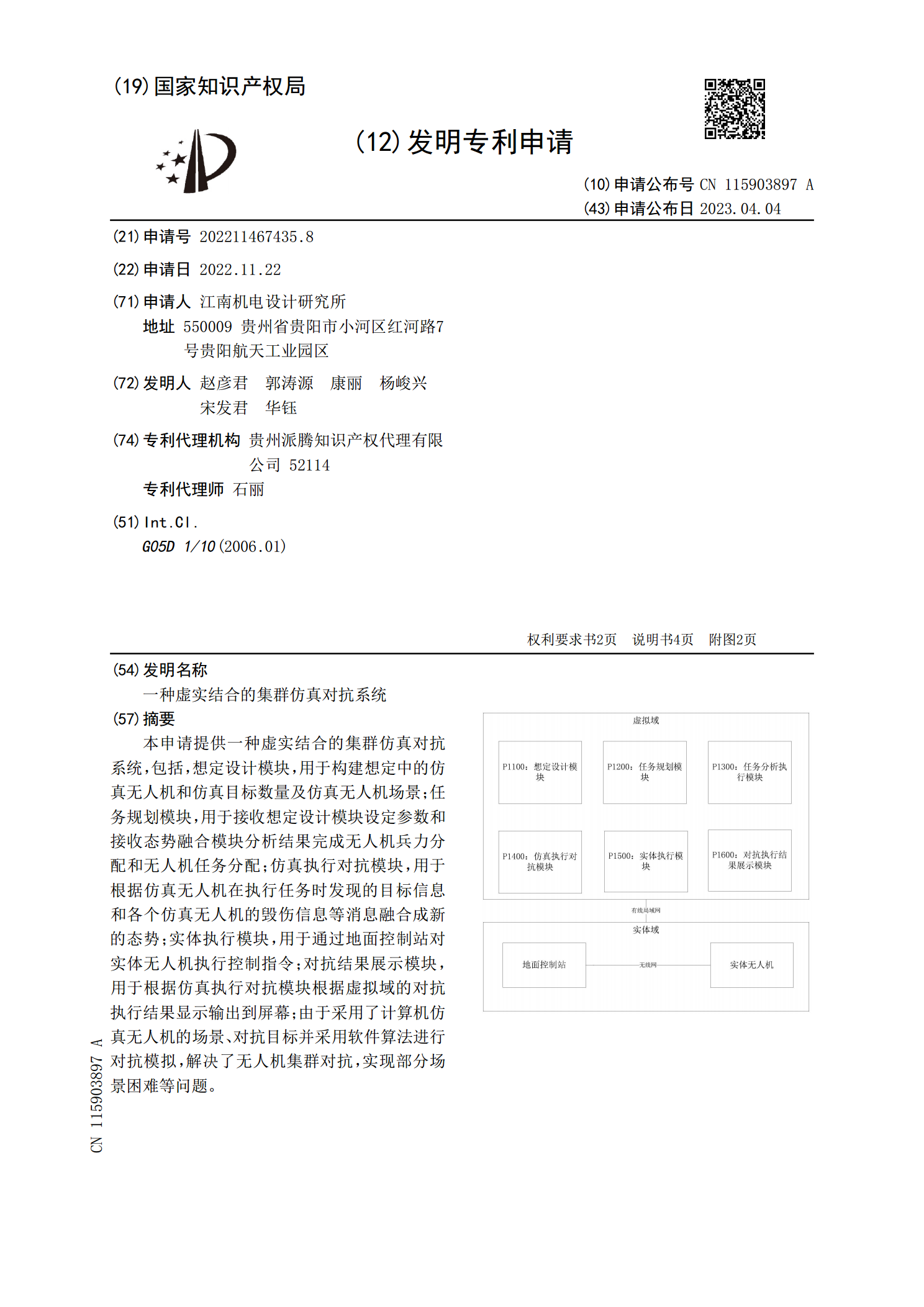
本申请提供一种虚实结合的集群仿真对抗系统,包括,想定设计模块,用于构建想定中的仿真无人机和仿真目标数量及仿真无人机场景;任务规划模块,用于接收想定设计模块设定参数和接收态势融合模块分析结果完成无人机兵力分配和无人机任务分配;仿真执行对抗模块,用于根据仿真无人机在执行任务时发现的目标信息和各个仿真无人机的毁伤信息等消息融合成新的态势;实体执行模块,用于通过地面控制站对实体无人机执行控制指令;对抗结果展示模块,用于根据仿真执行对抗模块根据虚拟域的对抗执行结果显示输出到屏幕;由于采用了计算机仿真无人机的场景、对
一种多无人机灾情探测方法及系统.pdf
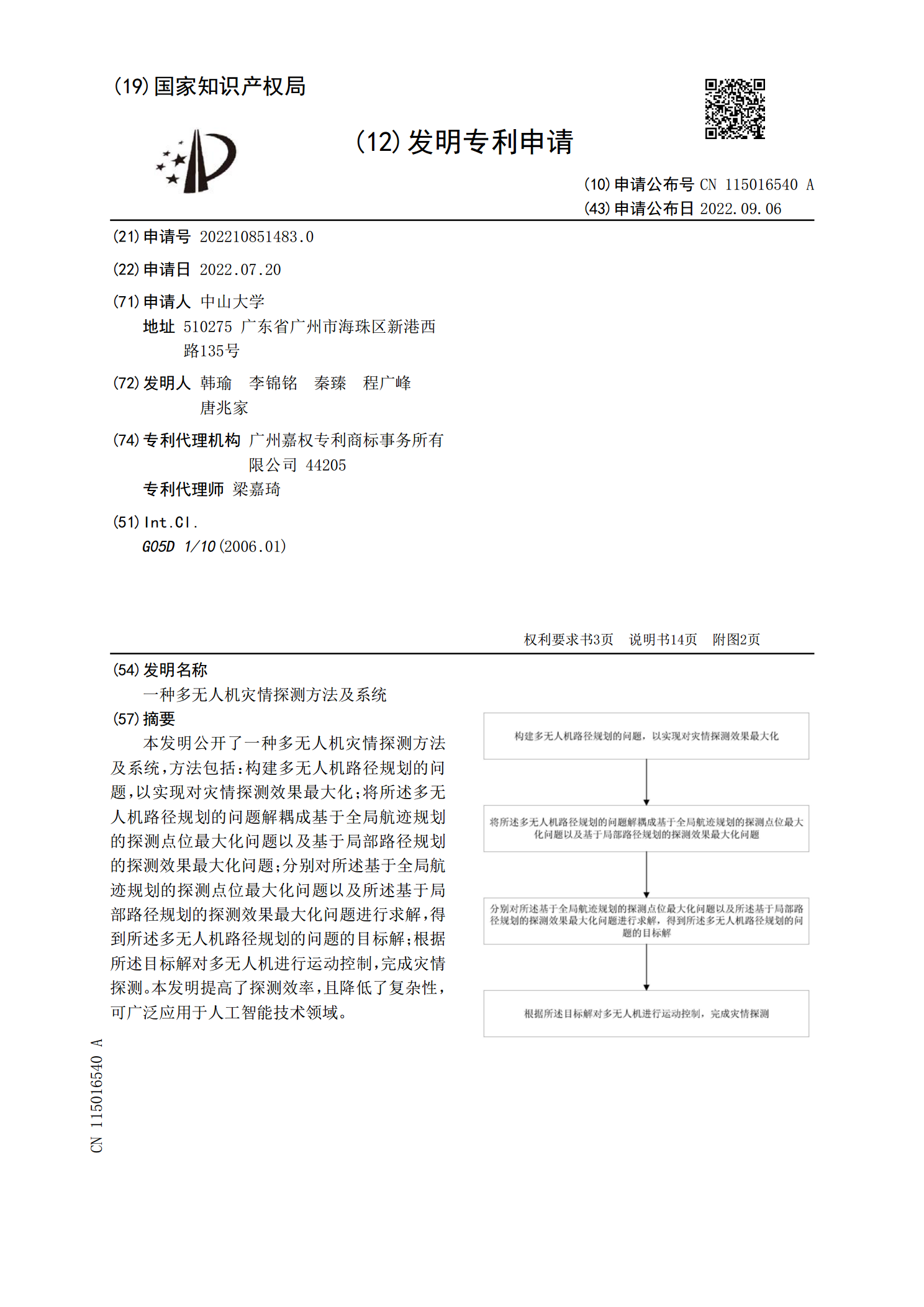
本发明公开了一种多无人机灾情探测方法及系统,方法包括:构建多无人机路径规划的问题,以实现对灾情探测效果最大化;将所述多无人机路径规划的问题解耦成基于全局航迹规划的探测点位最大化问题以及基于局部路径规划的探测效果最大化问题;分别对所述基于全局航迹规划的探测点位最大化问题以及所述基于局部路径规划的探测效果最大化问题进行求解,得到所述多无人机路径规划的问题的目标解;根据所述目标解对多无人机进行运动控制,完成灾情探测。本发明提高了探测效率,且降低了复杂性,可广泛应用于人工智能技术领域。
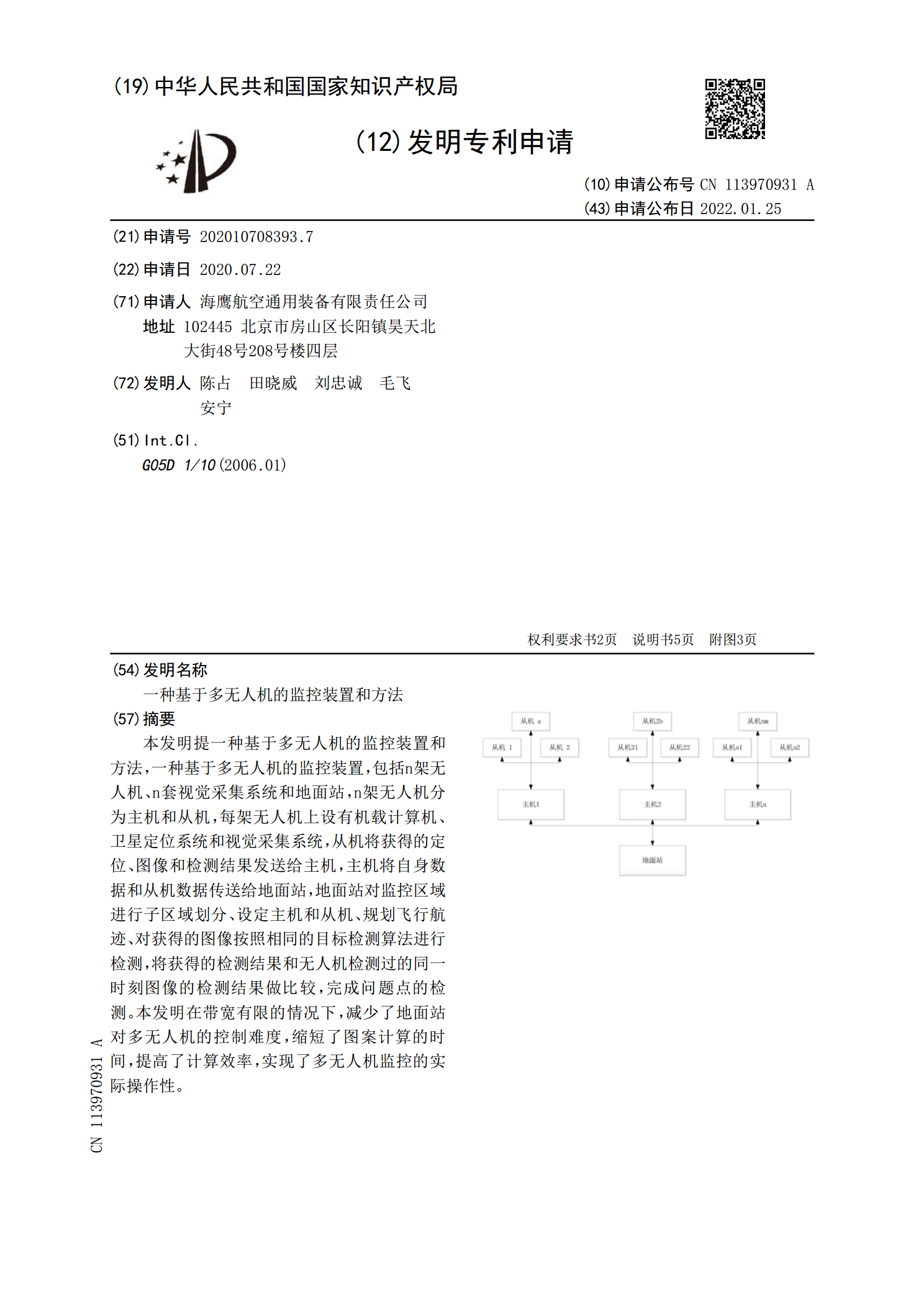
一种基于多无人机的监控装置和方法.pdf
本发明提一种基于多无人机的监控装置和方法,一种基于多无人机的监控装置,包括n架无人机、n套视觉采集系统和地面站,n架无人机分为主机和从机,每架无人机上设有机载计算机、卫星定位系统和视觉采集系统,从机将获得的定位、图像和检测结果发送给主机,主机将自身数据和从机数据传送给地面站,地面站对监控区域进行子区域划分、设定主机和从机、规划飞行航迹、对获得的图像按照相同的目标检测算法进行检测,将获得的检测结果和无人机检测过的同一时刻图像的检测结果做比较,完成问题点的检测。本发明在带宽有限的情况下,减少了地面站对多无人机