
基于混合算法的多目标双柔性作业车间调度方法及系统.pdf

萌运****魔王

1/10

2/10
3/10

4/10
5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于混合算法的多目标双柔性作业车间调度方法及系统.pdf
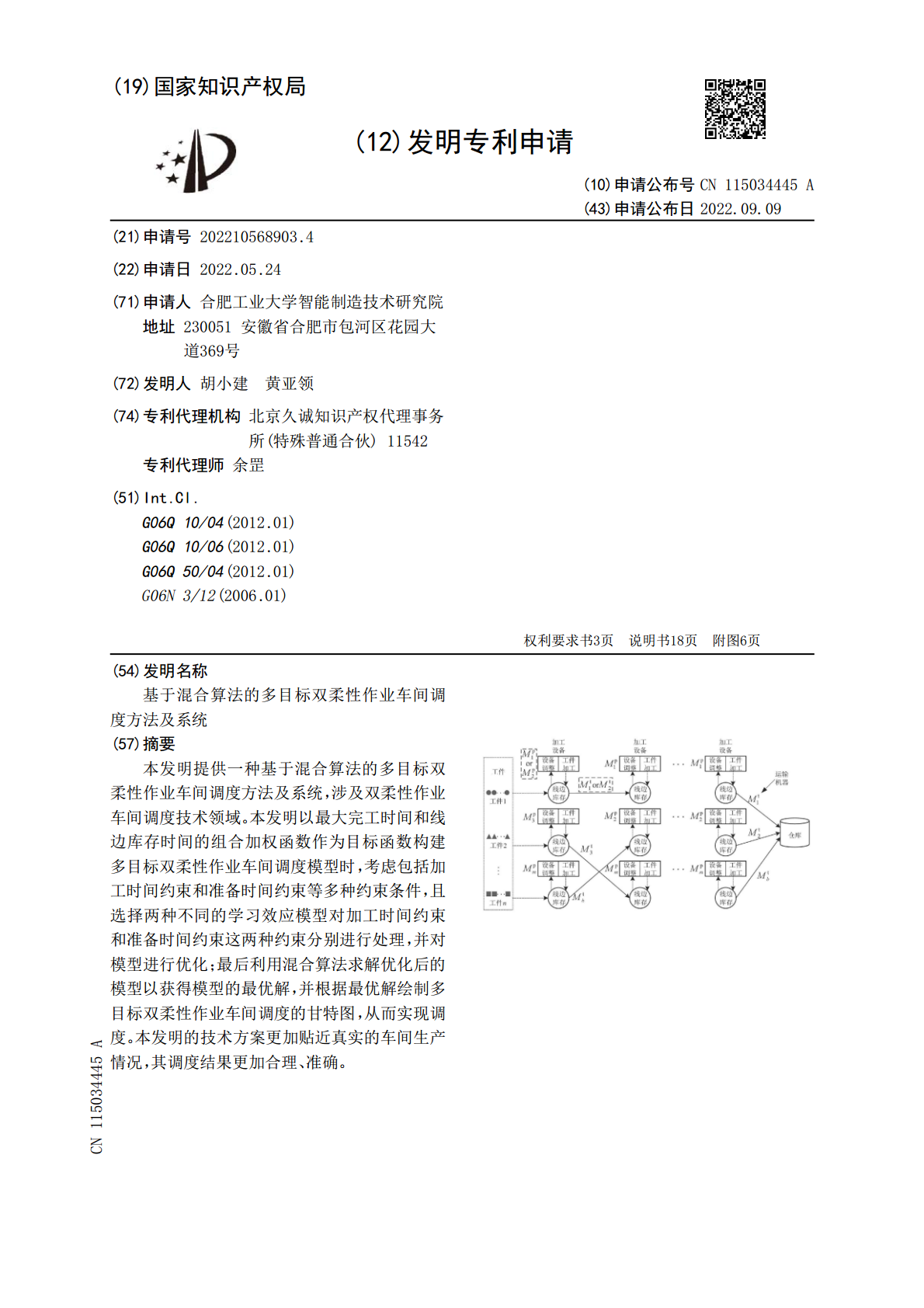
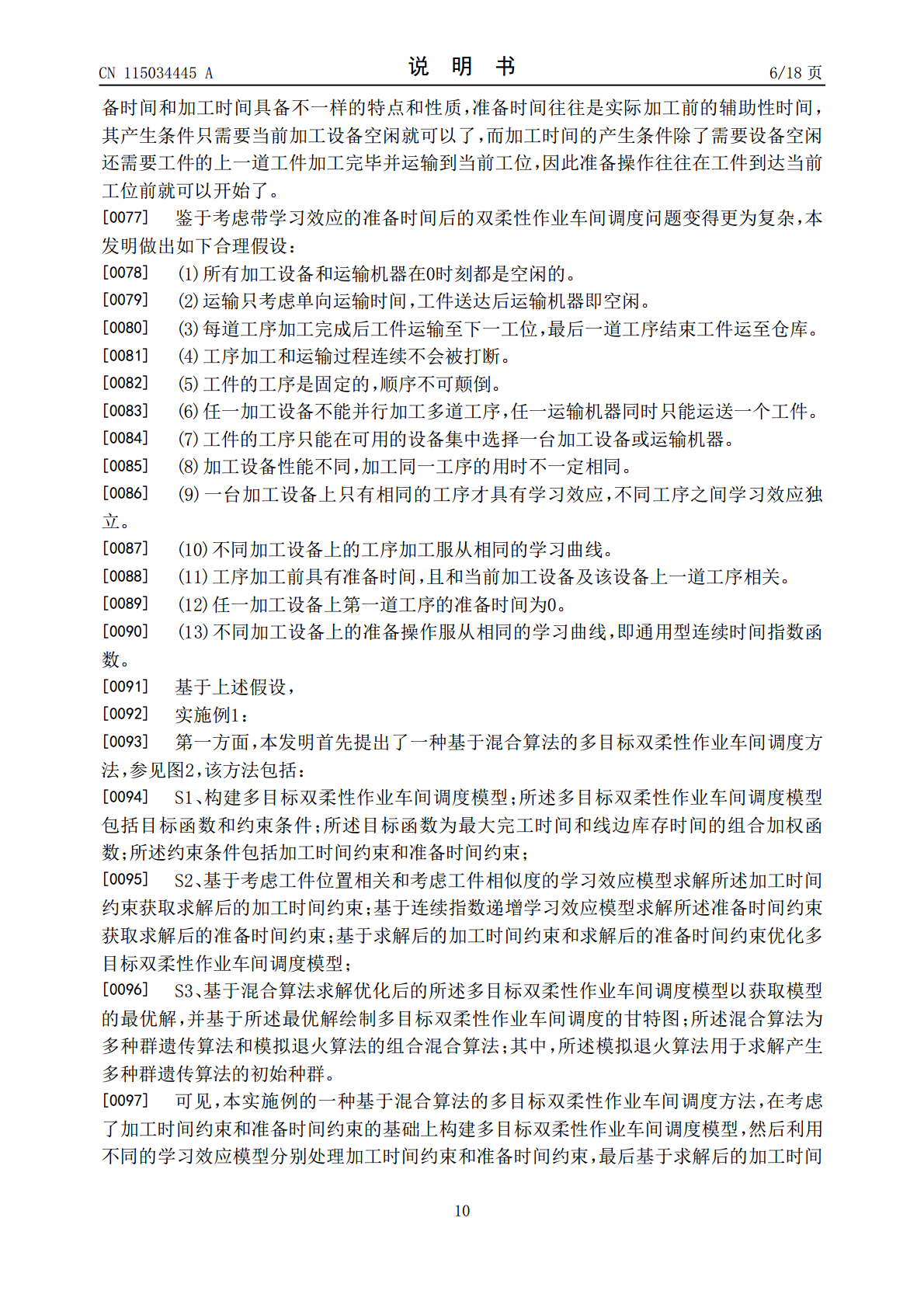
本发明提供一种基于混合算法的多目标双柔性作业车间调度方法及系统,涉及双柔性作业车间调度技术领域。本发明以最大完工时间和线边库存时间的组合加权函数作为目标函数构建多目标双柔性作业车间调度模型时,考虑包括加工时间约束和准备时间约束等多种约束条件,且选择两种不同的学习效应模型对加工时间约束和准备时间约束这两种约束分别进行处理,并对模型进行优化;最后利用混合算法求解优化后的模型以获得模型的最优解,并根据最优解绘制多目标双柔性作业车间调度的甘特图,从而实现调度。本发明的技术方案更加贴近真实的车间生产情况,其调度结果

基于学习效应的多目标双柔性作业车间调度方法及系统.pdf
本发明提供基于学习效应的多目标双柔性作业车间调度方法及系统,涉及双柔性作业车间调度技术领域。本发明以最大完工时间和线边库存时间的组合加权函数作为目标函数构建多目标双柔性作业车间调度模型时,考虑的目标函数的约束条件里包括加工时间约束和准备时间约束,并且为了更准确表示出这两种约束,进一步选择两种不同的学习效应模型对这两种约束分别进行处理;最后基于处理后的这两种约束优化多目标双柔性作业车间调度模型,并对优化后的模型进行求解以获得模型最优解,即可根据模型最优解绘制多目标双柔性作业车间调度的甘特图,以实现生产调度。

基于混合进化算法的柔性作业车间调度方法和系统.pdf
本申请提供了一种基于混合进化算法的柔性作业车间调度方法和系统,包括步骤:构建基于设置时间和加工时间的多时间约束的柔性作业车间调度模型,并设置约束条件;对工件加工的机器选择部分和工序排列部分进行分段式整数编码和解码操作;对混合进化算法的种群进行初始化处理得到父代种群;对父代种群基于邻域进行交叉操作和变异操作得到第一种群,对父代种群基于邻域进行本地搜索得到第二种群;对第一种群和第二种群进行精英保留操作得到精英种群;当混合进化算法满足迭代终止条件,根据精英种群对柔性作业车间调度模型求解,并对柔性作业车间进行调度

基于改进遗传算法的柔性作业车间多目标调度方法及系统.pdf
本发明提供的一种基于改进遗传算法的柔性作业车间多目标调度方法及系统,涉及柔性作业车间调度技术领域。本发明针对柔性作业车间的调度优化问题,以最小化最大完工时间和降低线边库存时间为目标,建立了考虑工序准备时间和带资源约束的运输时间的多目标调度优化模型,在求解调度优化的结果时,采用改进的遗传算法对模型进行求解,采用三层编码方式,使得染色体能携带更多的信息,并对交叉和变异算子进行设计,保证新产生的后代依然是可行解,并最终求得调度优化问题的最优解。本发明所提出的问题和求解问题时使用的方法更符合企业生产实际,求解结果
基于混合鲸鱼优化算法的柔性车间调度方法及系统.pdf
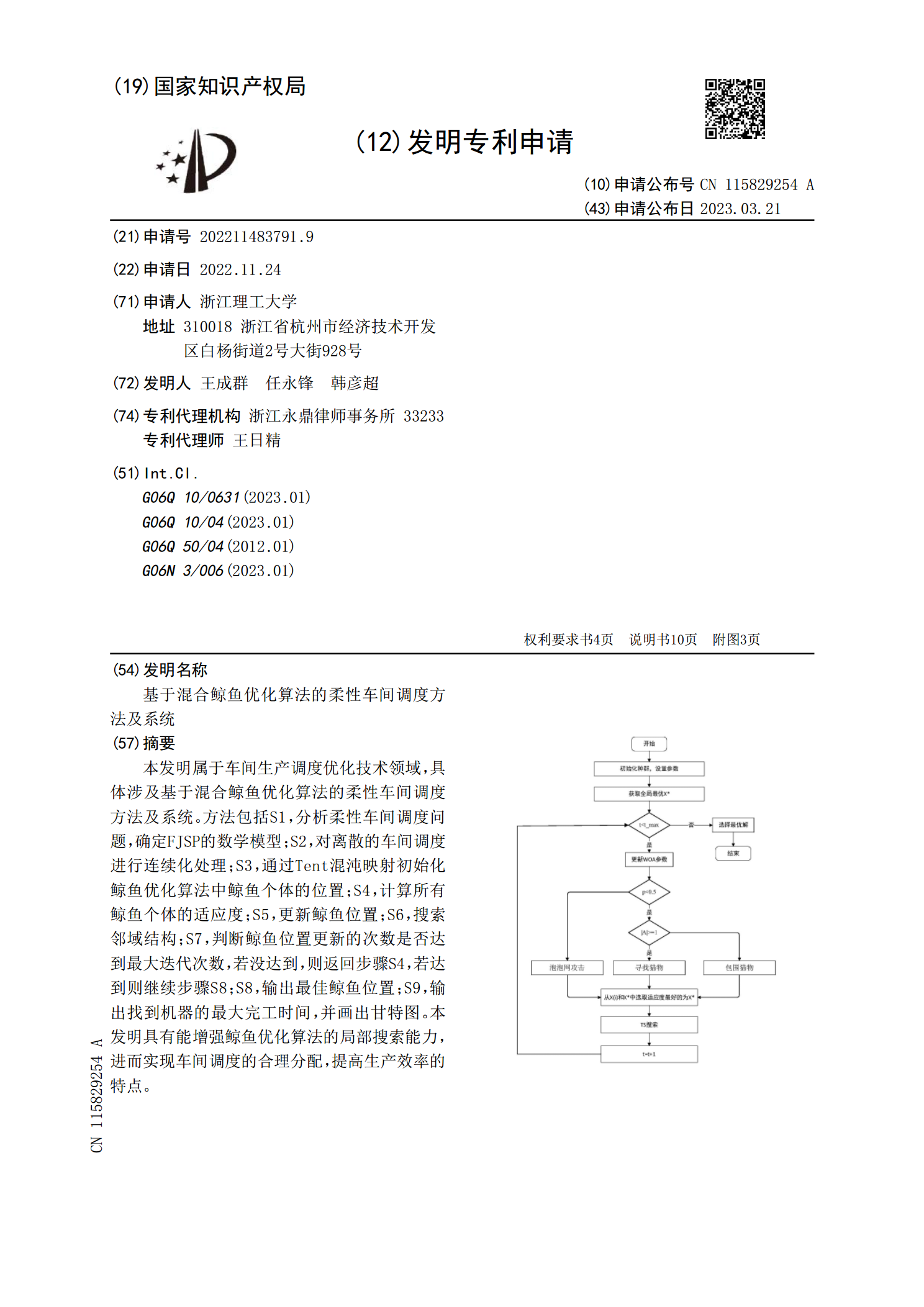
本发明属于车间生产调度优化技术领域,具体涉及基于混合鲸鱼优化算法的柔性车间调度方法及系统。方法包括S1,分析柔性车间调度问题,确定FJSP的数学模型;S2,对离散的车间调度进行连续化处理;S3,通过Tent混沌映射初始化鲸鱼优化算法中鲸鱼个体的位置;S4,计算所有鲸鱼个体的适应度;S5,更新鲸鱼位置;S6,搜索邻域结构;S7,判断鲸鱼位置更新的次数是否达到最大迭代次数,若没达到,则返回步骤S4,若达到则继续步骤S8;S8,输出最佳鲸鱼位置;S9,输出找到机器的最大完工时间,并画出甘特图。本发明具有能增强鲸