
基于学习效应的多目标双柔性作业车间调度方法及系统.pdf

Ja****20


1/10

2/10

3/10

4/10

5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于学习效应的多目标双柔性作业车间调度方法及系统.pdf
本发明提供基于学习效应的多目标双柔性作业车间调度方法及系统,涉及双柔性作业车间调度技术领域。本发明以最大完工时间和线边库存时间的组合加权函数作为目标函数构建多目标双柔性作业车间调度模型时,考虑的目标函数的约束条件里包括加工时间约束和准备时间约束,并且为了更准确表示出这两种约束,进一步选择两种不同的学习效应模型对这两种约束分别进行处理;最后基于处理后的这两种约束优化多目标双柔性作业车间调度模型,并对优化后的模型进行求解以获得模型最优解,即可根据模型最优解绘制多目标双柔性作业车间调度的甘特图,以实现生产调度。
基于混合算法的多目标双柔性作业车间调度方法及系统.pdf
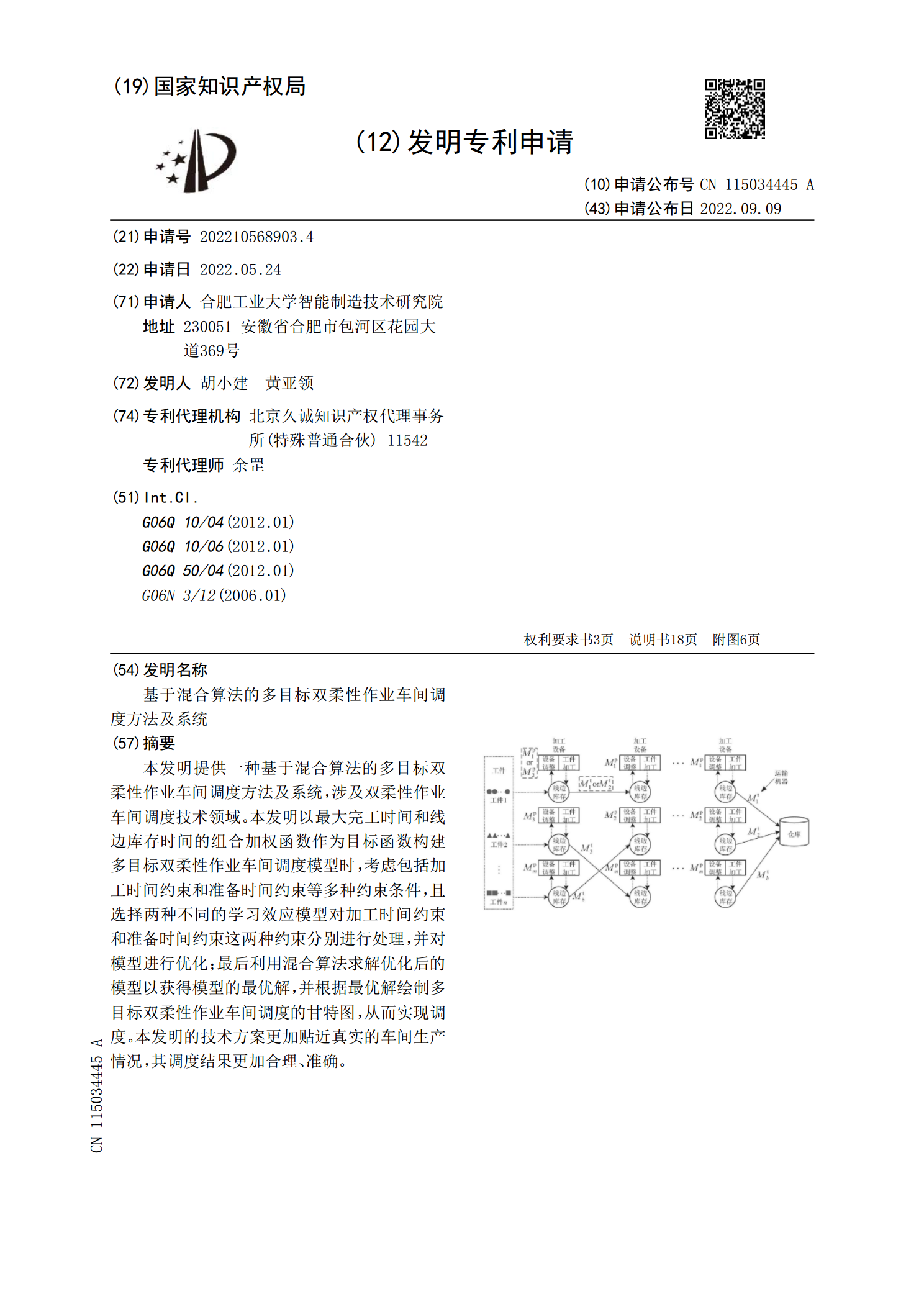
本发明提供一种基于混合算法的多目标双柔性作业车间调度方法及系统,涉及双柔性作业车间调度技术领域。本发明以最大完工时间和线边库存时间的组合加权函数作为目标函数构建多目标双柔性作业车间调度模型时,考虑包括加工时间约束和准备时间约束等多种约束条件,且选择两种不同的学习效应模型对加工时间约束和准备时间约束这两种约束分别进行处理,并对模型进行优化;最后利用混合算法求解优化后的模型以获得模型的最优解,并根据最优解绘制多目标双柔性作业车间调度的甘特图,从而实现调度。本发明的技术方案更加贴近真实的车间生产情况,其调度结果

基于改进遗传算法的柔性作业车间多目标调度方法及系统.pdf
本发明提供的一种基于改进遗传算法的柔性作业车间多目标调度方法及系统,涉及柔性作业车间调度技术领域。本发明针对柔性作业车间的调度优化问题,以最小化最大完工时间和降低线边库存时间为目标,建立了考虑工序准备时间和带资源约束的运输时间的多目标调度优化模型,在求解调度优化的结果时,采用改进的遗传算法对模型进行求解,采用三层编码方式,使得染色体能携带更多的信息,并对交叉和变异算子进行设计,保证新产生的后代依然是可行解,并最终求得调度优化问题的最优解。本发明所提出的问题和求解问题时使用的方法更符合企业生产实际,求解结果

多目标柔性作业车间调度方法研究.pdf
华中科技大学博士学位论文多目标柔性作业车间调度方法研究姓名:王晓娟申请学位级别:博士专业:工业工程指导教师:高亮;李培根2011-05-19摘要制造业是国民经济的重要组成部分。实际生产中的优化问题通常是多属性的一般是对多个目标的同时优化而且各个目标之间通常是不一致的比如产品质量和生产成本往往是两个互相冲突的目标。此外加工时间、完工

基于多目标粒子群算法的柔性作业车间调度优化方法.docx
基于多目标粒子群算法的柔性作业车间调度优化方法随着现代制造业的发展,柔性作业车间调度已经成为一个重要的研究领域。如何实现柔性作业车间的调度优化已成为制造业提高效率、降低成本、提高生产能力的关键问题。而多目标粒子群算法能够高效地解决这个问题。一、问题描述柔性作业车间调度问题通常是一个NP难问题,它涉及多个作业、机器和约束条件。柔性作业车间调度问题包括如下几个方面:一是对各个订单进行分组和安排,使得不同的订单不仅可以在机器上进行混合加工,而且还能保证在时间上尽量接近。二是确定作业到机器的优化分配方案。三是确定