
基于混合鲸鱼优化算法的柔性车间调度方法及系统.pdf

一条****涛k

1/10
2/10

3/10

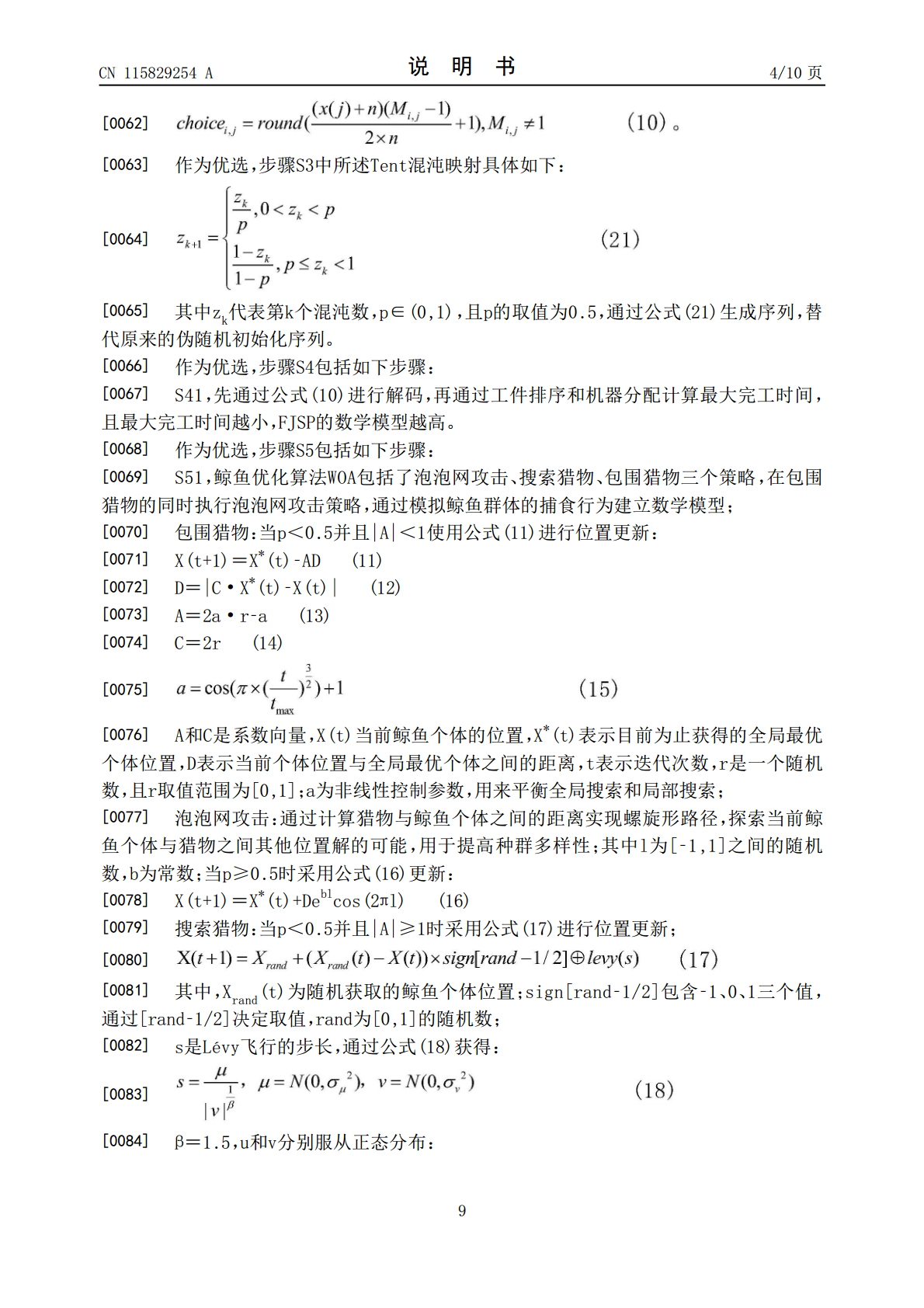
4/10
5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于混合鲸鱼优化算法的柔性车间调度方法及系统.pdf
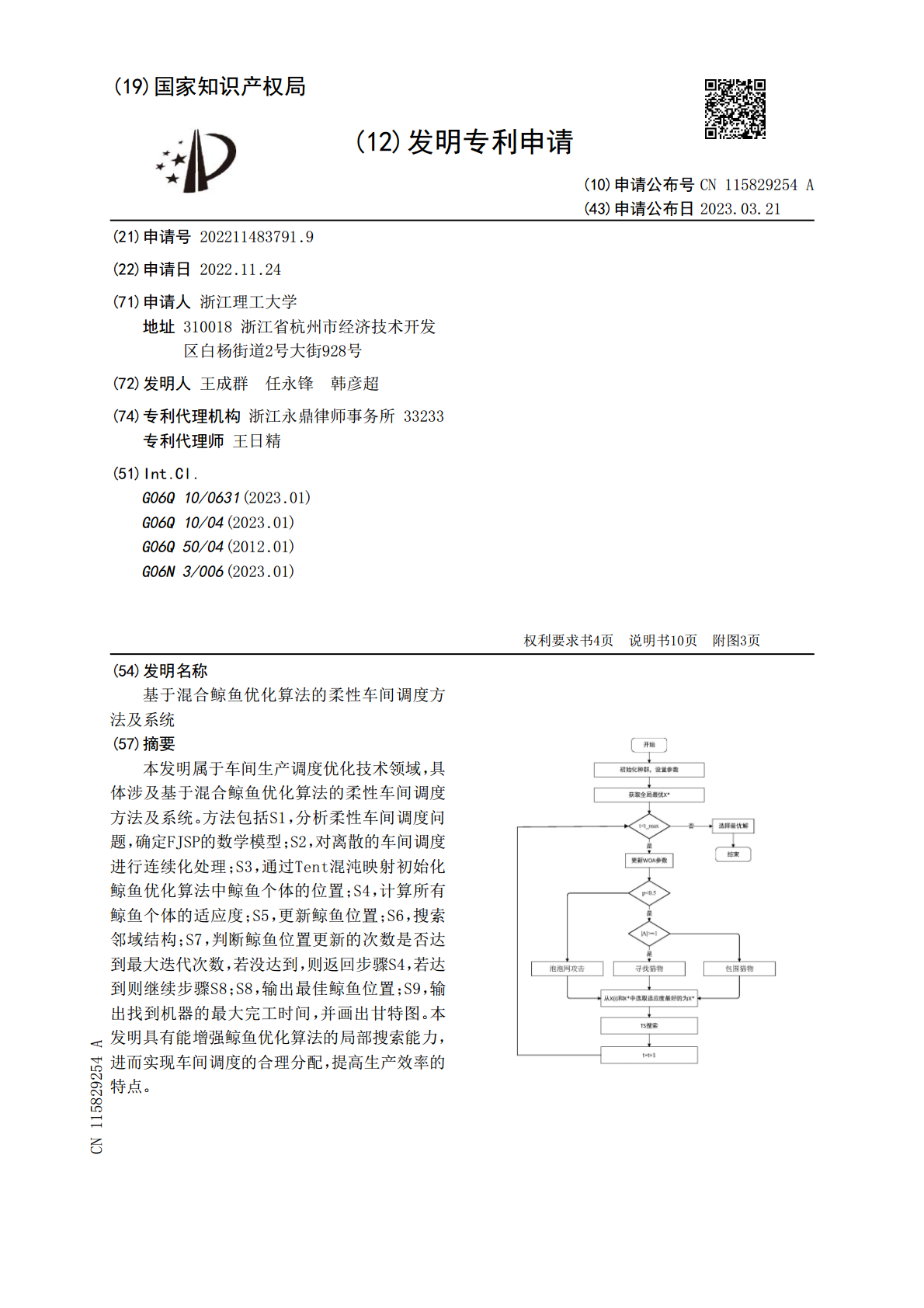
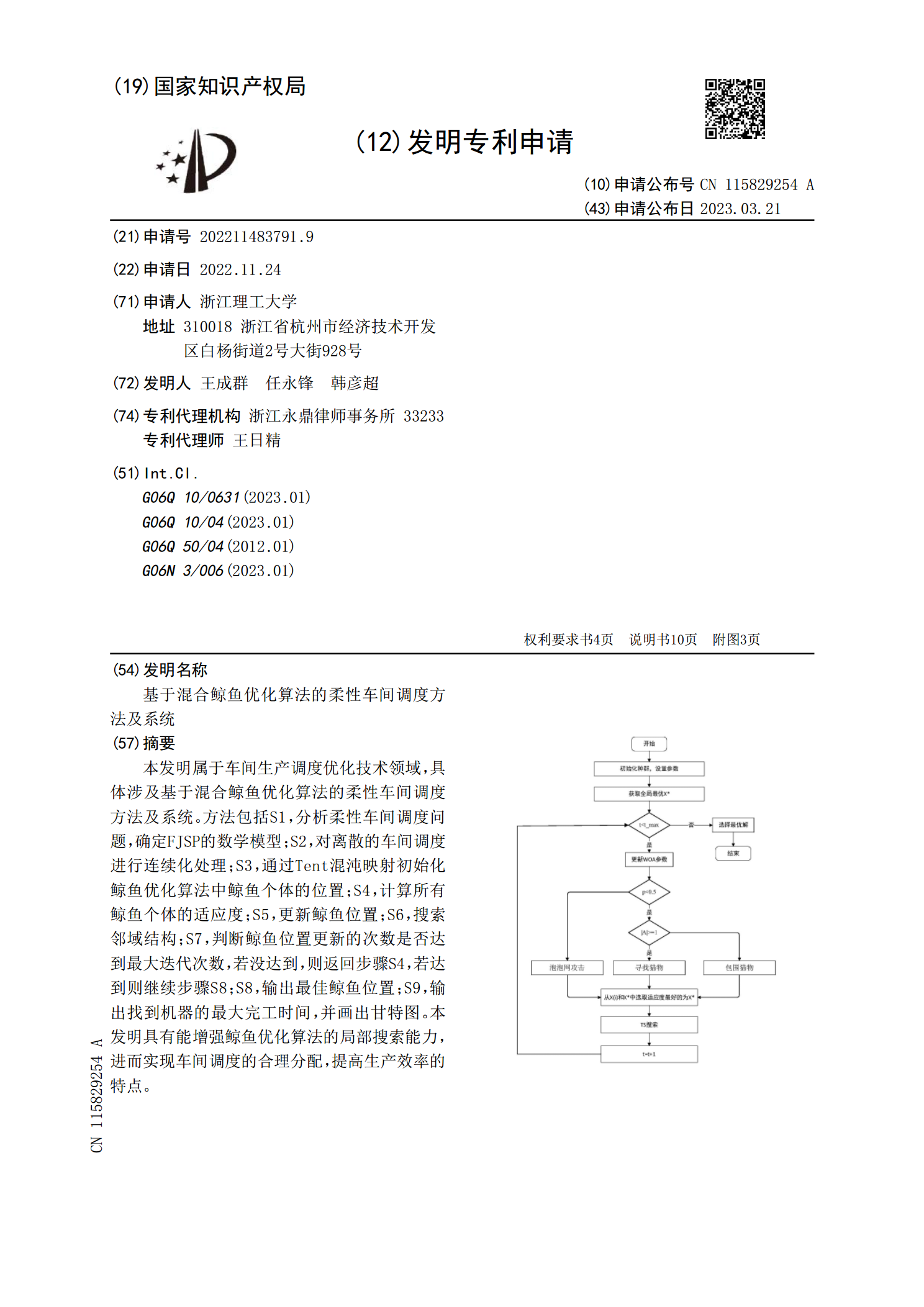
本发明属于车间生产调度优化技术领域,具体涉及基于混合鲸鱼优化算法的柔性车间调度方法及系统。方法包括S1,分析柔性车间调度问题,确定FJSP的数学模型;S2,对离散的车间调度进行连续化处理;S3,通过Tent混沌映射初始化鲸鱼优化算法中鲸鱼个体的位置;S4,计算所有鲸鱼个体的适应度;S5,更新鲸鱼位置;S6,搜索邻域结构;S7,判断鲸鱼位置更新的次数是否达到最大迭代次数,若没达到,则返回步骤S4,若达到则继续步骤S8;S8,输出最佳鲸鱼位置;S9,输出找到机器的最大完工时间,并画出甘特图。本发明具有能增强鲸

基于鲸鱼群算法的柔性作业车间调度方法.docx
基于鲸鱼群算法的柔性作业车间调度方法柔性作业车间调度问题(FlexibleJob-ShopSchedulingProblem,FJSP)是一种NP难题,其主要目标是在多个工件、多个工序和多个机器中制定一份最优的调度方案,以最大效率地完成工作。这样一个任务通常不适用传统的调度算法,而需要更复杂、更高效的方法。目前,鲸鱼群算法(WhaleOptimizationAlgorithm,WOA)作为一种最新、最先进的群体智能优化算法,具备了能够处理这样具有挑战性的问题的能力。鲸鱼群算法源于鲸鱼狩猎行为中的自组织行为
基于混合遗传鲸鱼优化算法的柔性作业车间自动导引车融合调度方法.pptx
汇报人:CONTENTS添加章节标题混合遗传鲸鱼优化算法算法原理算法特点算法流程算法应用柔性作业车间自动导引车融合调度方法调度方法概述调度方法的实现过程调度方法的优势与不足调度方法的应用场景混合遗传鲸鱼优化算法在柔性作业车间自动导引车融合调度中的应用应用背景和意义应用方法和步骤应用效果和评价应用前景和展望实验验证与结果分析实验环境与数据准备实验过程与结果展示结果分析与讨论实验结论与总结结论与建议研究结论研究不足与展望对实际应用的建议汇报人:

一种基于混合鲸鱼群算法求解柔性作业车间调度的方法.pdf
本发明公开了一种基于混合鲸鱼群算法求解柔性作业车间调度的方法,首先定义柔性作业车间调度的编码方式为两段式随机键编码,然后采用转换机制进行映射转换;定义适应度函数求解总加工时间最短为优化目标;然后采用鲸鱼群算法,对柔性作业车间调度问题中的参数以及鲸鱼种群初始化,初始化分为随机生成工序的排序方案和采用改进遗传算法的遗传变异方式生成与工序排序方案对应的较优的机器分配方案,进而产生较优的初始种群;计算各调度方案的适应度值,寻找并保留最好的调度解;最后输出最优的调度解及其对应的适应度函数值,即为所求最优调度方案,本

基于混合进化算法的柔性作业车间调度方法和系统.pdf
本申请提供了一种基于混合进化算法的柔性作业车间调度方法和系统,包括步骤:构建基于设置时间和加工时间的多时间约束的柔性作业车间调度模型,并设置约束条件;对工件加工的机器选择部分和工序排列部分进行分段式整数编码和解码操作;对混合进化算法的种群进行初始化处理得到父代种群;对父代种群基于邻域进行交叉操作和变异操作得到第一种群,对父代种群基于邻域进行本地搜索得到第二种群;对第一种群和第二种群进行精英保留操作得到精英种群;当混合进化算法满足迭代终止条件,根据精英种群对柔性作业车间调度模型求解,并对柔性作业车间进行调度