
电机驱动方法、系统、装置以及微投影设备.pdf

子安****吖吖


1/10

2/10

3/10

4/10
5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

电机驱动方法、系统、装置以及微投影设备.pdf
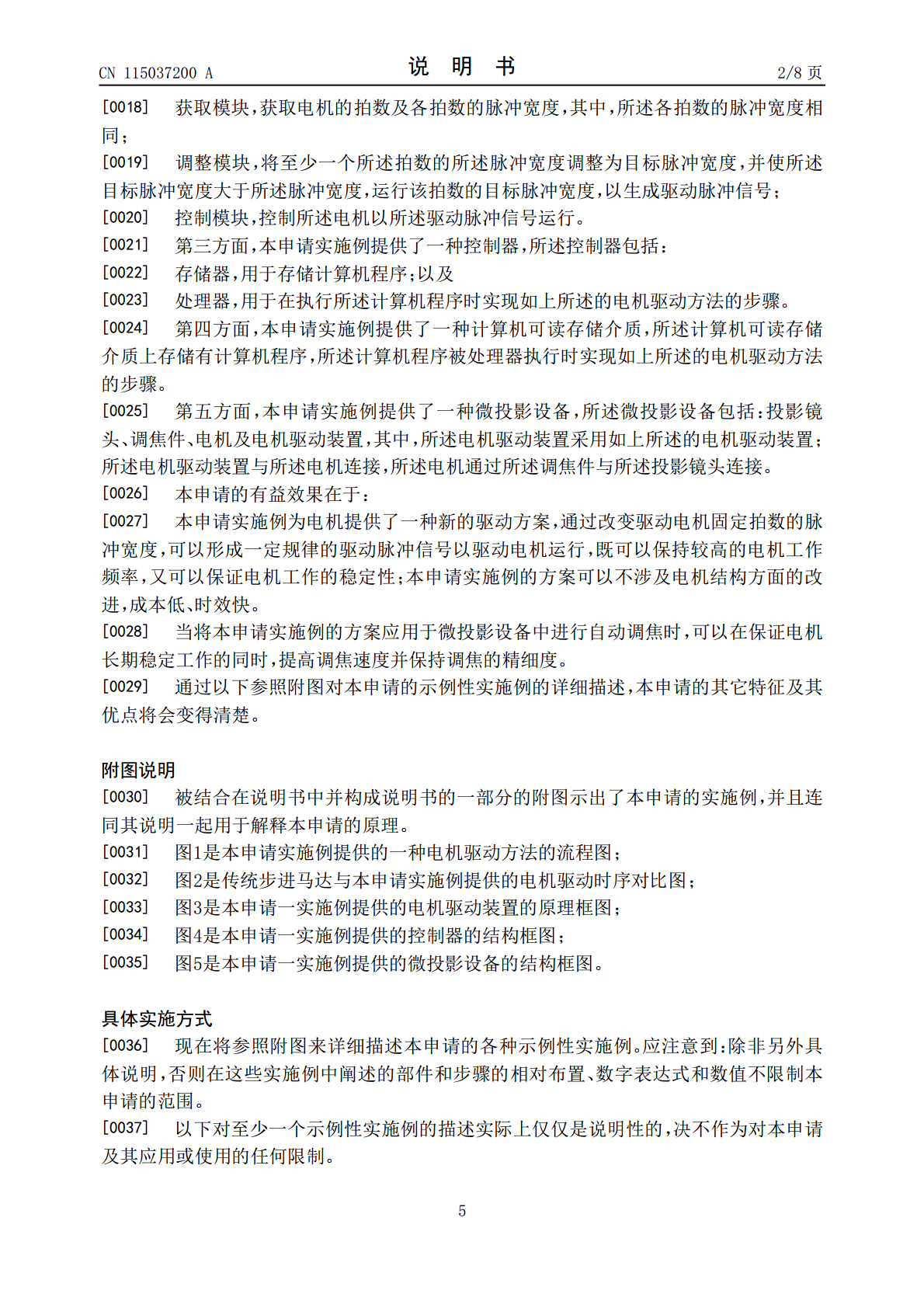
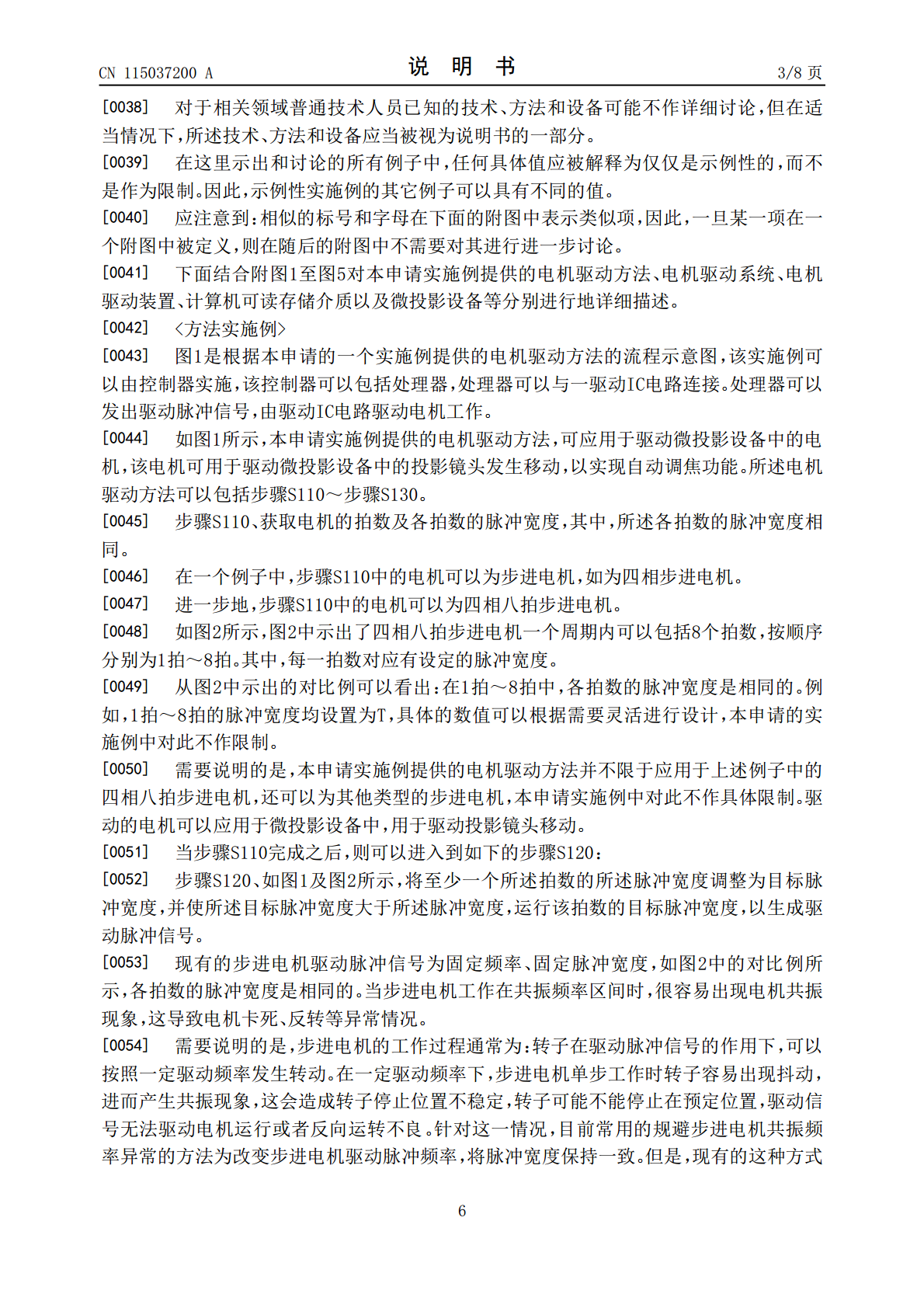
本申请实施例公开了一种电机驱动方法、系统、装置以及微投影设备;其中,所述电机驱动方法包括:获取电机的拍数及各拍数的脉冲宽度,其中,所述各拍数的脉冲宽度相同;将至少一个所述拍数的所述脉冲宽度调整为目标脉冲宽度,并使所述目标脉冲宽度大于所述脉冲宽度,运行该拍数的目标脉冲宽度,以生成驱动脉冲信号;控制所述电机以所述驱动脉冲信号运行。本申请实施例提供的方案,通过改变电机固定拍数的脉冲宽度,可以实现保持电机较高工作频率的同时,保证电机工作的稳定性。

旋转电机的控制装置以及驱动系统.pdf
旋转电机的控制装置为通过控制对旋转电机的各相绕组施加电压的逆变器来针对每个相绕组控制使各相绕组通电的电流的控制装置,构成为具备控制部,该控制部以使在旋转电机的定子铁芯与转子铁芯之间的气隙部的径向磁通密度和周向磁通密度中彼此次数相同的谐波分量的相位差成为预定的相位差目标值的方式运算施加于各相绕组的电压指令值,依照运算出的电压指令值对逆变器进行控制。
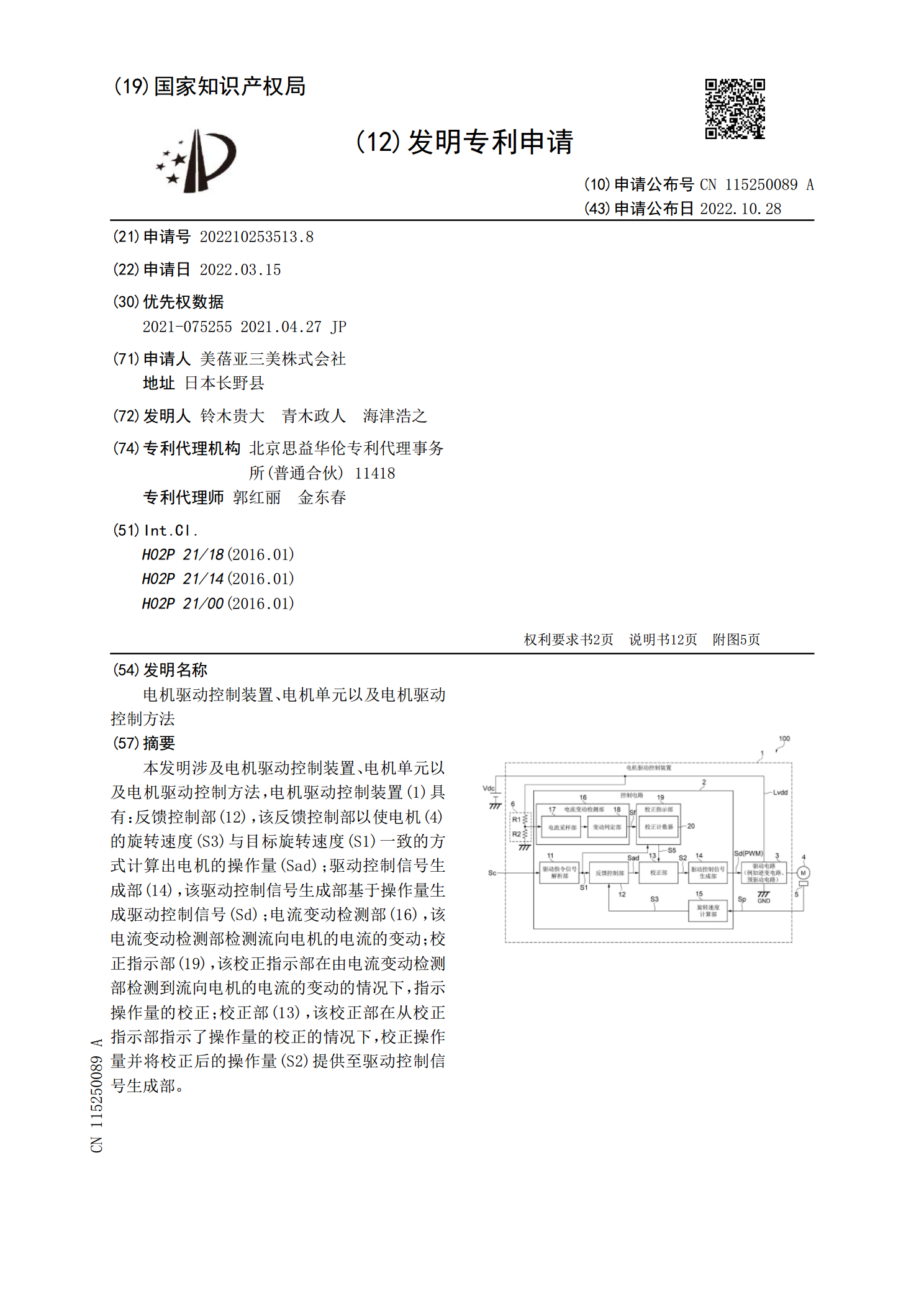
电机驱动控制装置、电机单元以及电机驱动控制方法.pdf
本发明涉及电机驱动控制装置、电机单元以及电机驱动控制方法,电机驱动控制装置(1)具有:反馈控制部(12),该反馈控制部以使电机(4)的旋转速度(S3)与目标旋转速度(S1)一致的方式计算出电机的操作量(Sad);驱动控制信号生成部(14),该驱动控制信号生成部基于操作量生成驱动控制信号(Sd);电流变动检测部(16),该电流变动检测部检测流向电机的电流的变动;校正指示部(19),该校正指示部在由电流变动检测部检测到流向电机的电流的变动的情况下,指示操作量的校正;校正部(13),该校正部在从校正指示部指示了
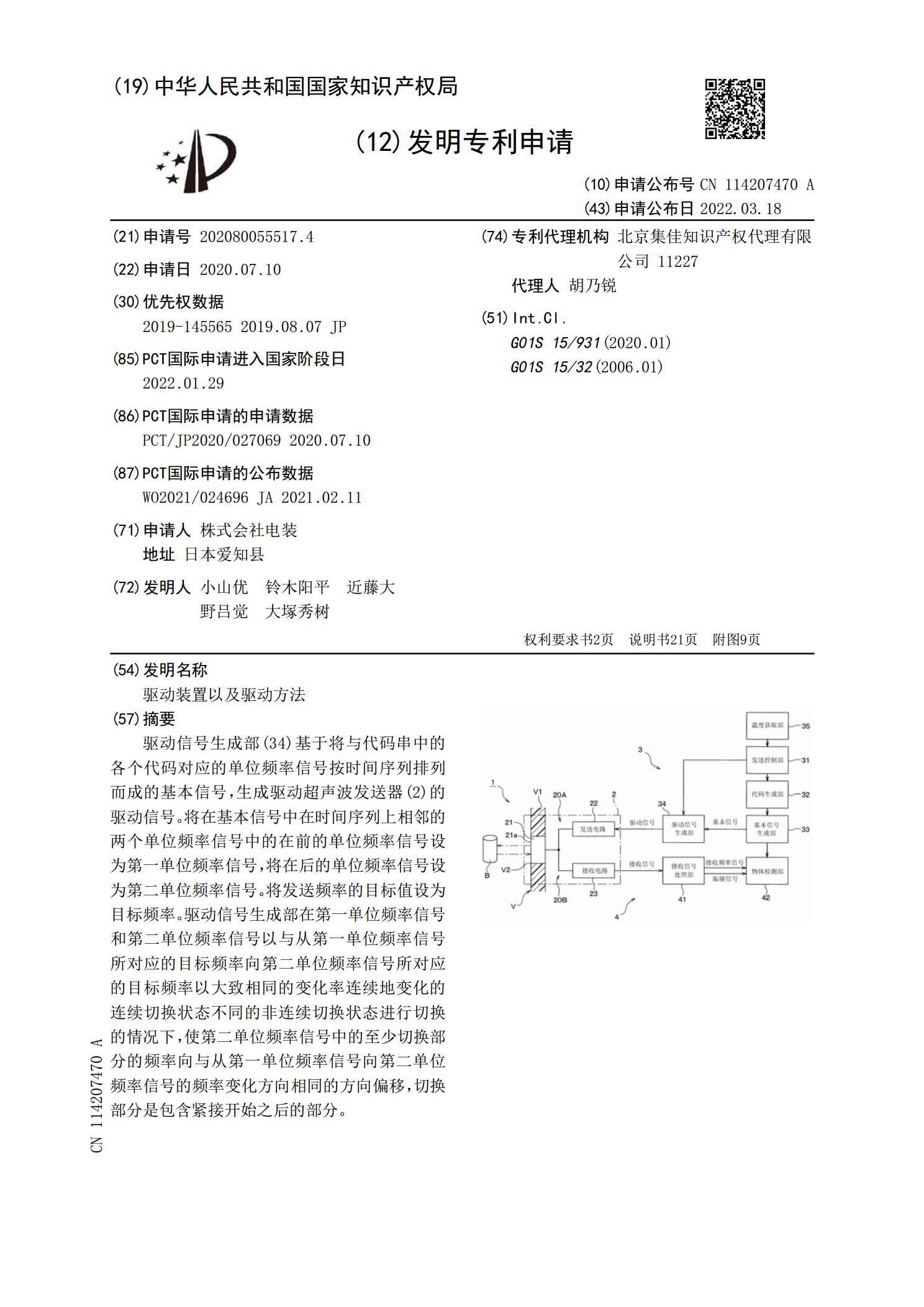
驱动装置以及驱动方法.pdf
驱动信号生成部(34)基于将与代码串中的各个代码对应的单位频率信号按时间序列排列而成的基本信号,生成驱动超声波发送器(2)的驱动信号。将在基本信号中在时间序列上相邻的两个单位频率信号中的在前的单位频率信号设为第一单位频率信号,将在后的单位频率信号设为第二单位频率信号。将发送频率的目标值设为目标频率。驱动信号生成部在第一单位频率信号和第二单位频率信号以与从第一单位频率信号所对应的目标频率向第二单位频率信号所对应的目标频率以大致相同的变化率连续地变化的连续切换状态不同的非连续切换状态进行切换的情况下,使第二单

电机、驱动系统以及该驱动系统的用途.pdf
本发明涉及一种电机,包括第一转子(1)、第二转子(2)和公共定子(3),其中,转子(1、2)彼此轴向设置并被设置用于不同的转动速度和/或转动方向。