
利用拾取装置校正元件位置的方法及拾取装置.pdf

山梅****ai

1/10
2/10

3/10
4/10

5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

利用拾取装置校正元件位置的方法及拾取装置.pdf
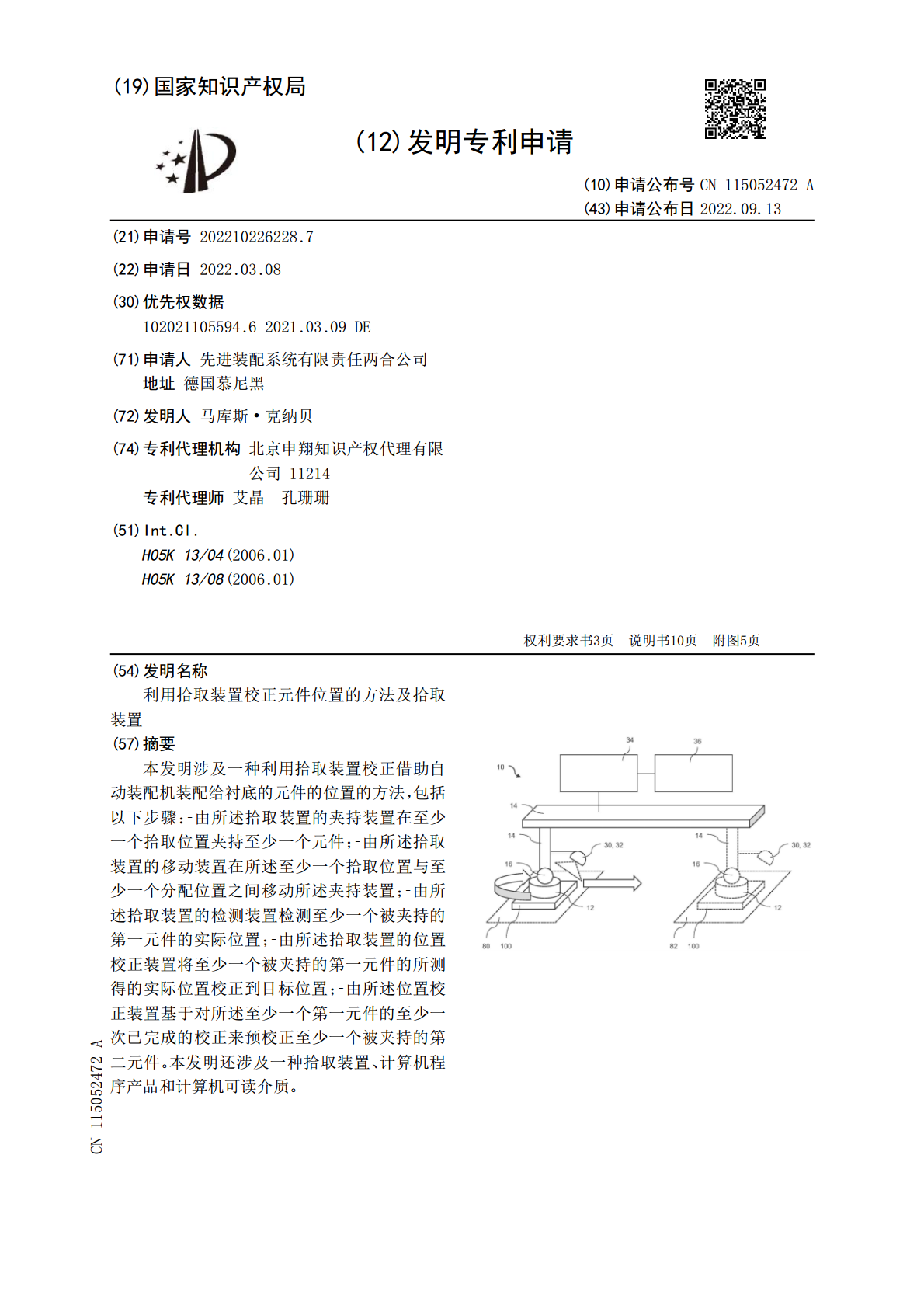
本发明涉及一种利用拾取装置校正借助自动装配机装配给衬底的元件的位置的方法,包括以下步骤:‑由所述拾取装置的夹持装置在至少一个拾取位置夹持至少一个元件;‑由所述拾取装置的移动装置在所述至少一个拾取位置与至少一个分配位置之间移动所述夹持装置;‑由所述拾取装置的检测装置检测至少一个被夹持的第一元件的实际位置;‑由所述拾取装置的位置校正装置将至少一个被夹持的第一元件的所测得的实际位置校正到目标位置;‑由所述位置校正装置基于对所述至少一个第一元件的至少一次已完成的校正来预校正至少一个被夹持的第二元件。本发明还涉及一
拾取筒夹、拾取装置及安装装置.pdf
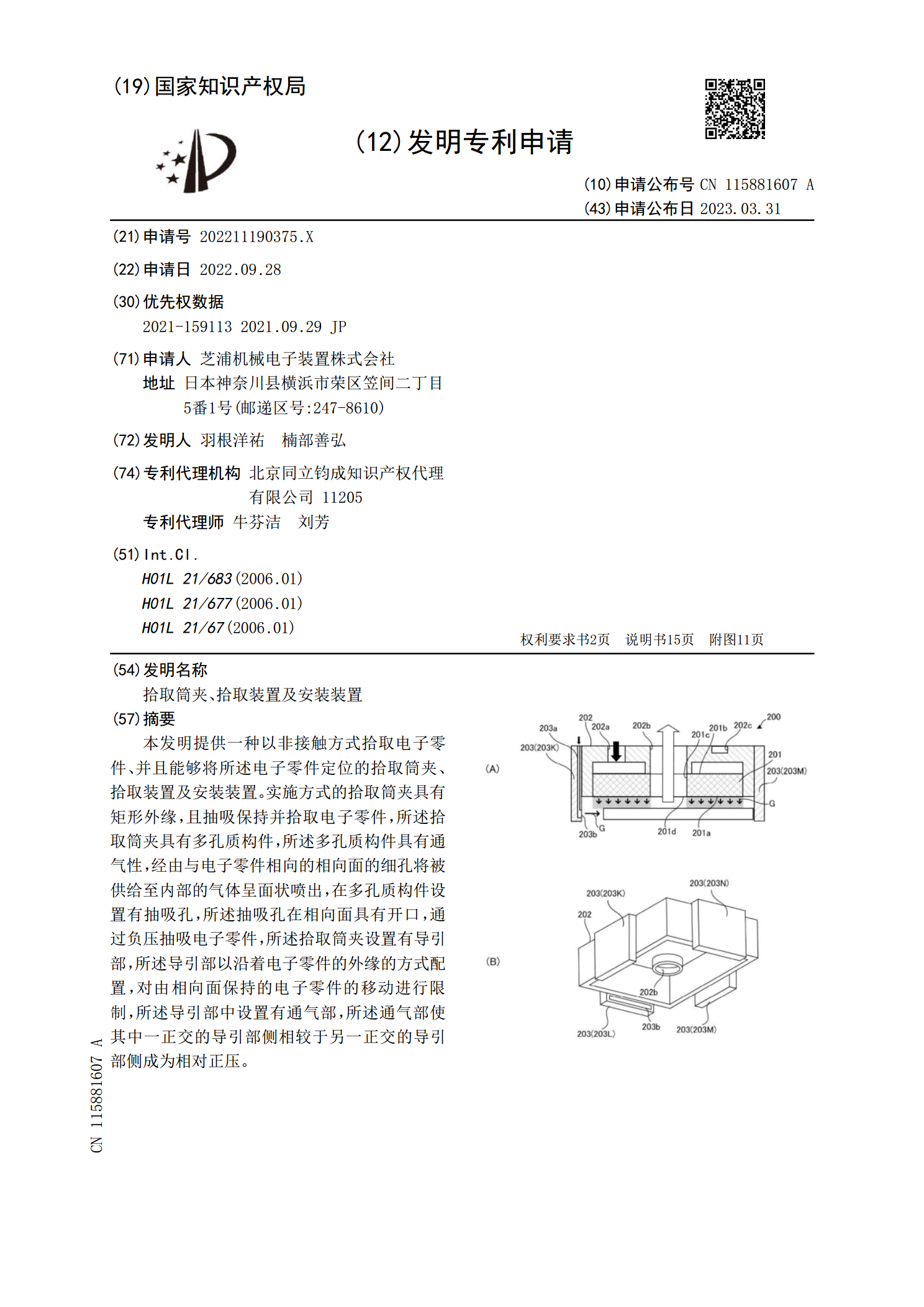
本发明提供一种以非接触方式拾取电子零件、并且能够将所述电子零件定位的拾取筒夹、拾取装置及安装装置。实施方式的拾取筒夹具有矩形外缘,且抽吸保持并拾取电子零件,所述拾取筒夹具有多孔质构件,所述多孔质构件具有通气性,经由与电子零件相向的相向面的细孔将被供给至内部的气体呈面状喷出,在多孔质构件设置有抽吸孔,所述抽吸孔在相向面具有开口,通过负压抽吸电子零件,所述拾取筒夹设置有导引部,所述导引部以沿着电子零件的外缘的方式配置,对由相向面保持的电子零件的移动进行限制,所述导引部中设置有通气部,所述通气部使其中一正交的导

拾取装置.pdf
一种用于从工作台面(2)拾取预定类型的工件(100)的拾取装置(1),所述工件(100)具有两个彼此背离的表面(161、162),所述拾取装置(1)包括:具有第一端(11)和第二端(12)的收集臂(10);设置在收集臂(10)的第二端(12)的收集头(19);其中所述收集头(19)包括:连接至收集臂的第二端(12)的基座(20);以及在收集头(19)上布置在最远侧的前构件(50),其中所述前构件(50)由弹性柔韧材料形成,并且包括最远侧表面(52、52’、52”)和从最远侧表面(52、52’、52”)向内

拾取装置.pdf
本发明提供一种拾取装置。利用移动机构(8)使摄像装置(5)追踪搬送部(1)同步移动的同时利用摄像装置(5)摄像工件(2),由此降低搬送部(1)和摄像装置(5)的相对速度,使运动模糊减轻。

晶粒拾取装置及方法.pdf
本发明提供了一种晶粒拾取装置及方法,晶粒拾取装置包括:载台,其包含用于放置晶粒的水平台面;设置于所述载台中的顶推元件,其包含可在垂直于所述水平台面的方向上切换伸出和缩进状态的顶针;在所述顶针处于伸出状态时,所述顶针的顶部高于所述水平台面且可在多个高度位置处保持固定;用于从所述载台上夹取所述晶粒的真空夹具,其设置于所述载台的上方。本发明通过针对大尺寸芯片的晶粒拾取装置及工艺过程进行优化调整,确保了大尺寸芯片的晶粒拾取过程具有较高的成功率;采用多阶段升降的顶针设计,通过调整顶针升降高度及停留时间,确保了真空夹