
基于车辆的检测系统的数据处理方法、装置和存储介质.pdf

是湛****21

1/10
2/10
3/10
4/10
5/10
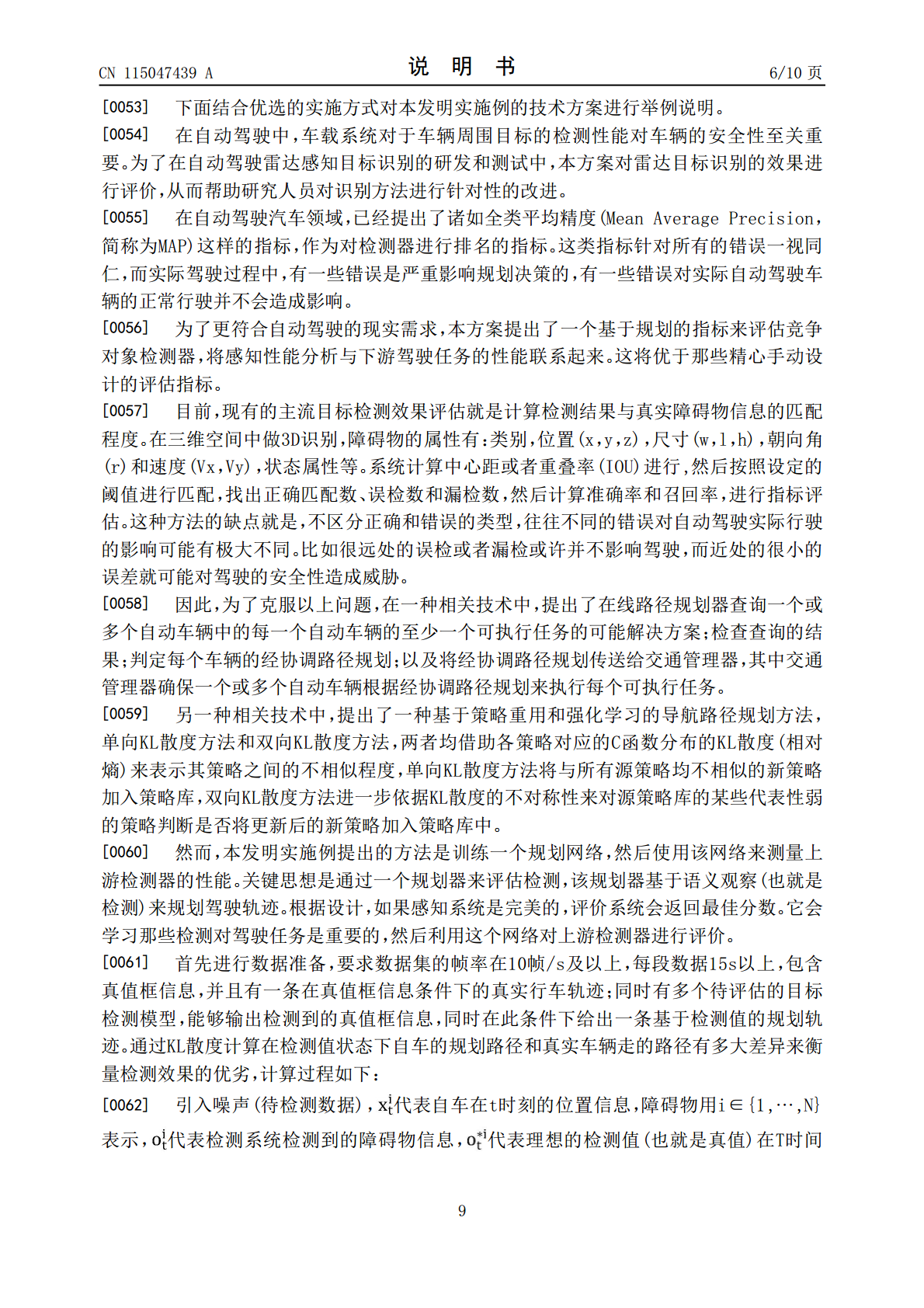
6/10
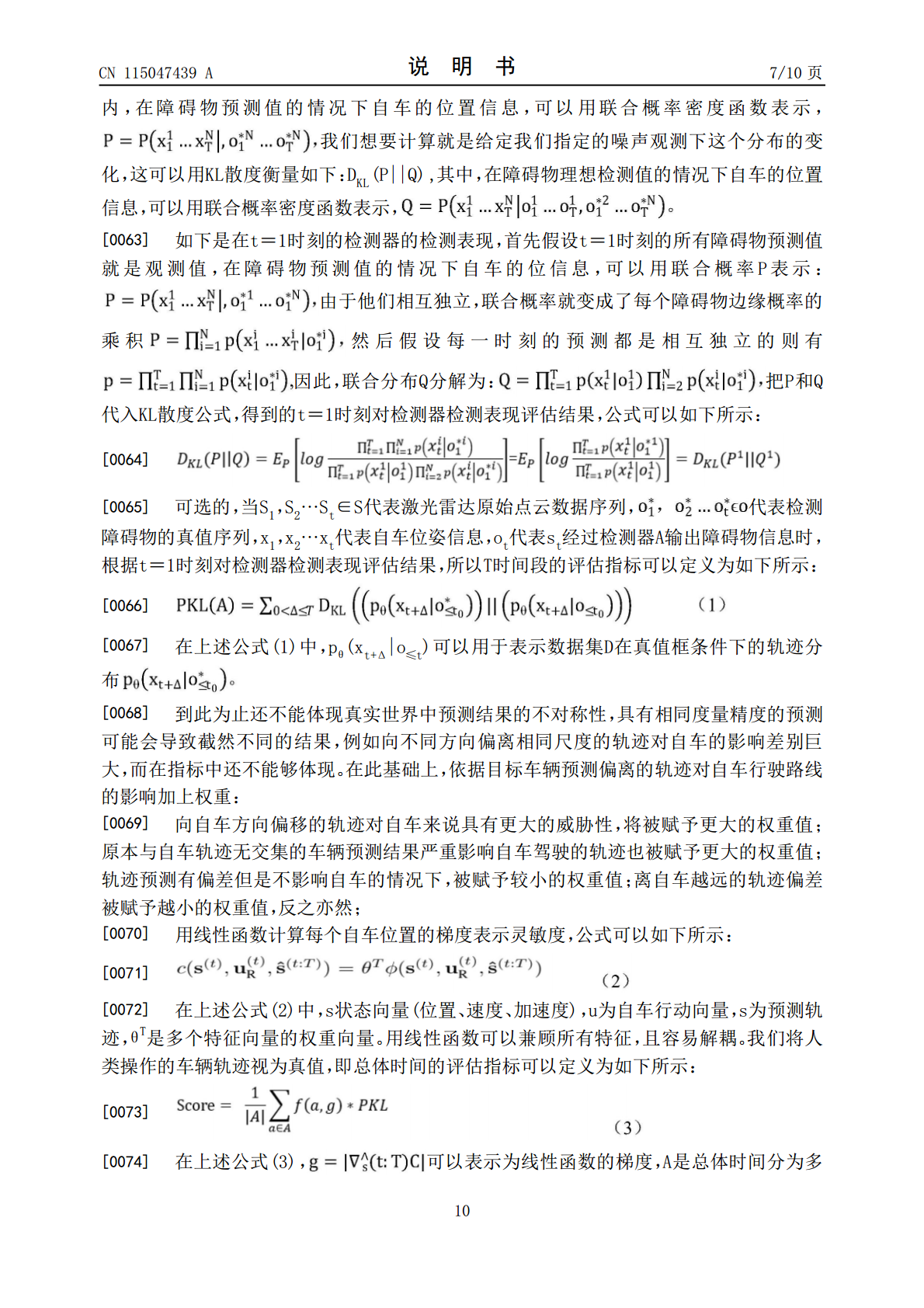
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于车辆的检测系统的数据处理方法、装置和存储介质.pdf
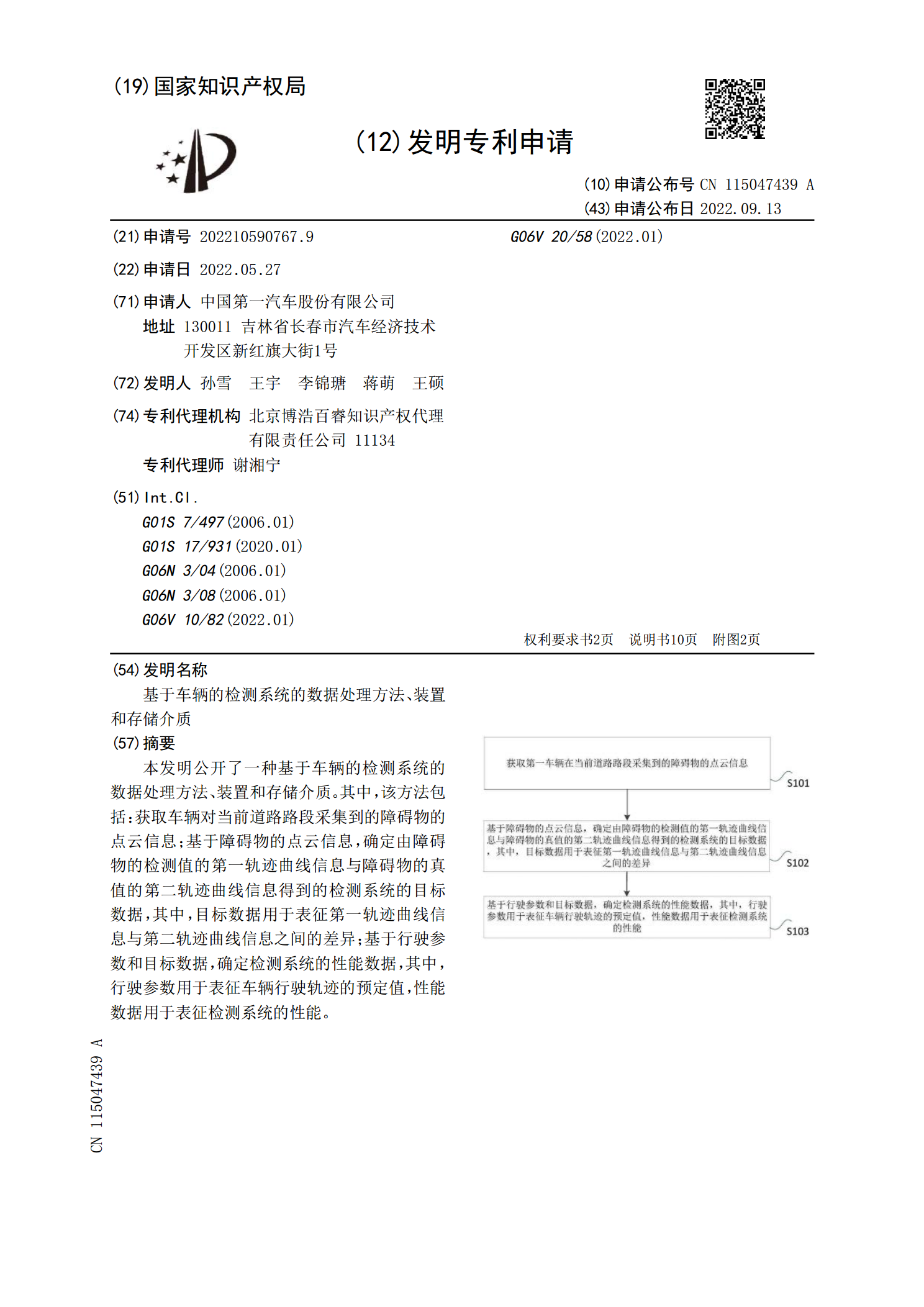
本发明公开了一种基于车辆的检测系统的数据处理方法、装置和存储介质。其中,该方法包括:获取车辆对当前道路路段采集到的障碍物的点云信息;基于障碍物的点云信息,确定由障碍物的检测值的第一轨迹曲线信息与障碍物的真值的第二轨迹曲线信息得到的检测系统的目标数据,其中,目标数据用于表征第一轨迹曲线信息与第二轨迹曲线信息之间的差异;基于行驶参数和目标数据,确定检测系统的性能数据,其中,行驶参数用于表征车辆行驶轨迹的预定值,性能数据用于表征检测系统的性能。

基于多系统的数据处理方法、装置、设备和存储介质.pdf
本申请涉及数据处理领域,提供一种基于多系统的数据处理方法、装置、设备和存储介质,方法包括:获取与目标业务对应的所有关联系统的系统信息;基于所有系统信息,获取各关联系统的系统对接方式;判断当前时间是否处于预设的闲暇时间段内;若是,对于每一个关联系统,基于与该关联系统的系统对接方式对应的数据处理规则,将该关联系统中与目标业务对应的业务数据写入预设的数据转换层;对数据转换层中包含的所有业务数据进行同构化转换处理得到处理后的业务数据;从数据转换层中提取处理后的业务数据并存储。本申请能够实现对于目标业务的业务数据的
数据处理方法、系统、装置、设备和存储介质.pdf
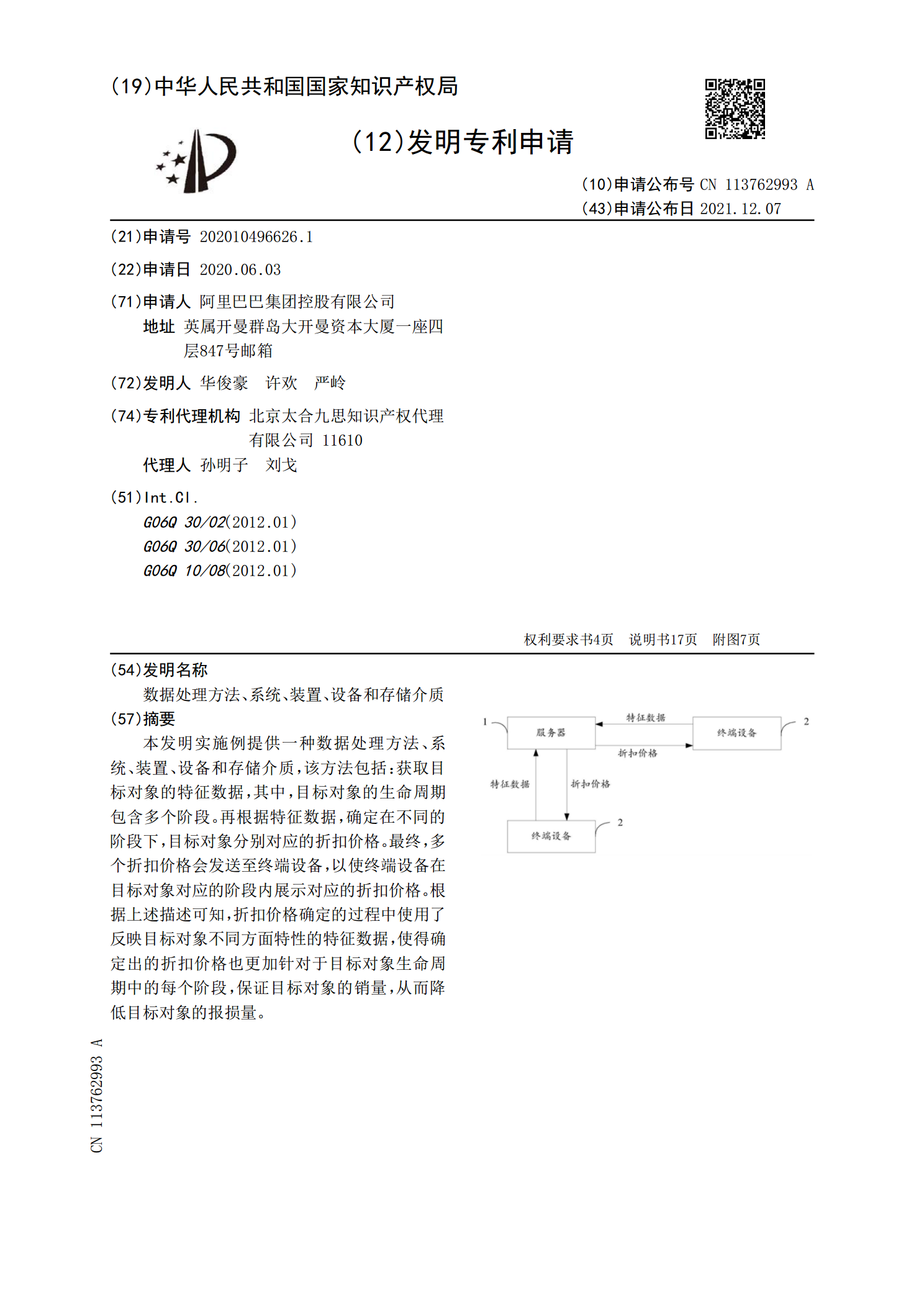
本发明实施例提供一种数据处理方法、系统、装置、设备和存储介质,该方法包括:获取目标对象的特征数据,其中,目标对象的生命周期包含多个阶段。再根据特征数据,确定在不同的阶段下,目标对象分别对应的折扣价格。最终,多个折扣价格会发送至终端设备,以使终端设备在目标对象对应的阶段内展示对应的折扣价格。根据上述描述可知,折扣价格确定的过程中使用了反映目标对象不同方面特性的特征数据,使得确定出的折扣价格也更加针对于目标对象生命周期中的每个阶段,保证目标对象的销量,从而降低目标对象的报损量。
数据处理方法、装置、设备、系统和存储介质.pdf
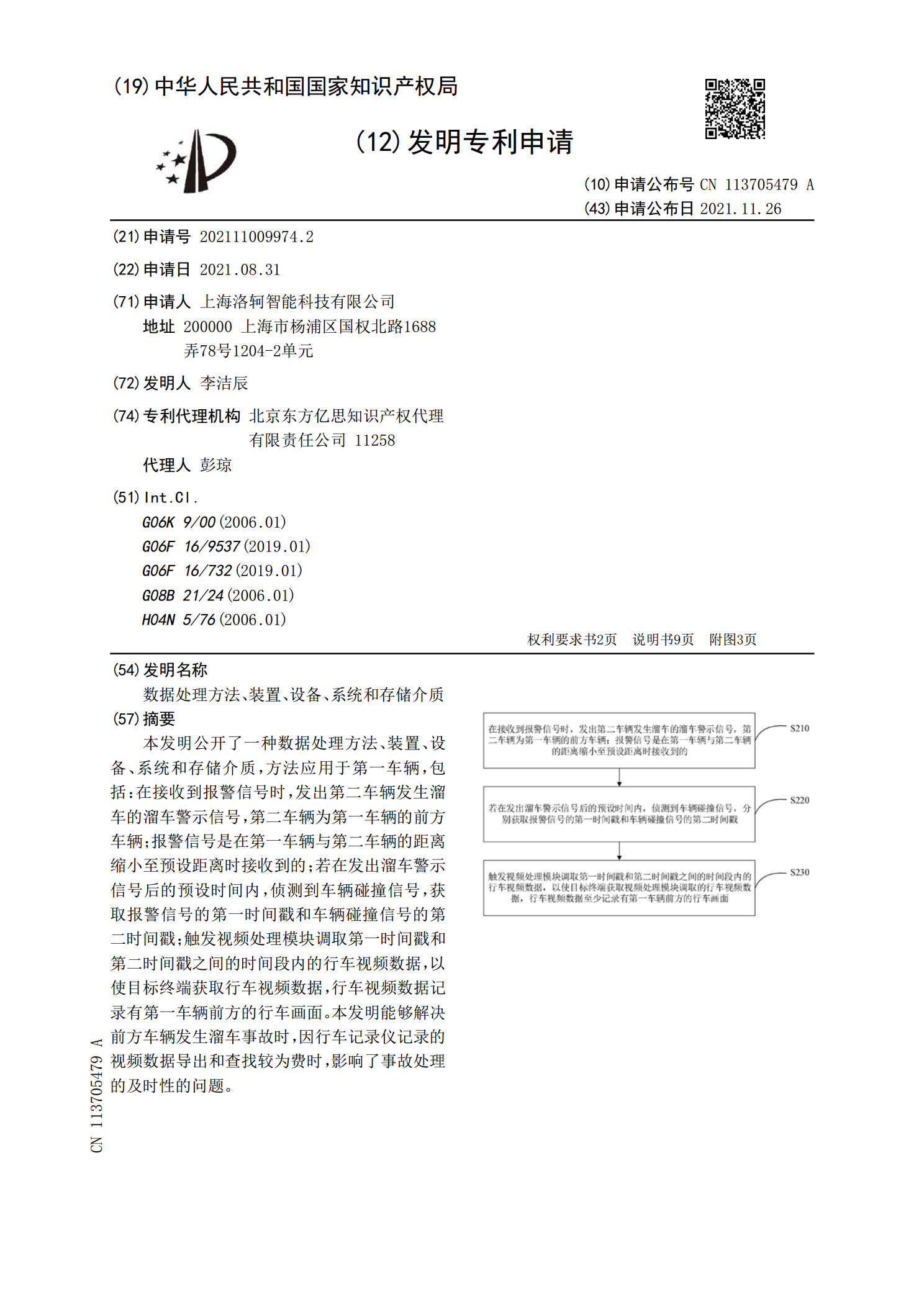
本发明公开了一种数据处理方法、装置、设备、系统和存储介质,方法应用于第一车辆,包括:在接收到报警信号时,发出第二车辆发生溜车的溜车警示信号,第二车辆为第一车辆的前方车辆;报警信号是在第一车辆与第二车辆的距离缩小至预设距离时接收到的;若在发出溜车警示信号后的预设时间内,侦测到车辆碰撞信号,获取报警信号的第一时间戳和车辆碰撞信号的第二时间戳;触发视频处理模块调取第一时间戳和第二时间戳之间的时间段内的行车视频数据,以使目标终端获取行车视频数据,行车视频数据记录有第一车辆前方的行车画面。本发明能够解决前方车辆发生
页面数据处理方法、装置、车辆及存储介质.pdf
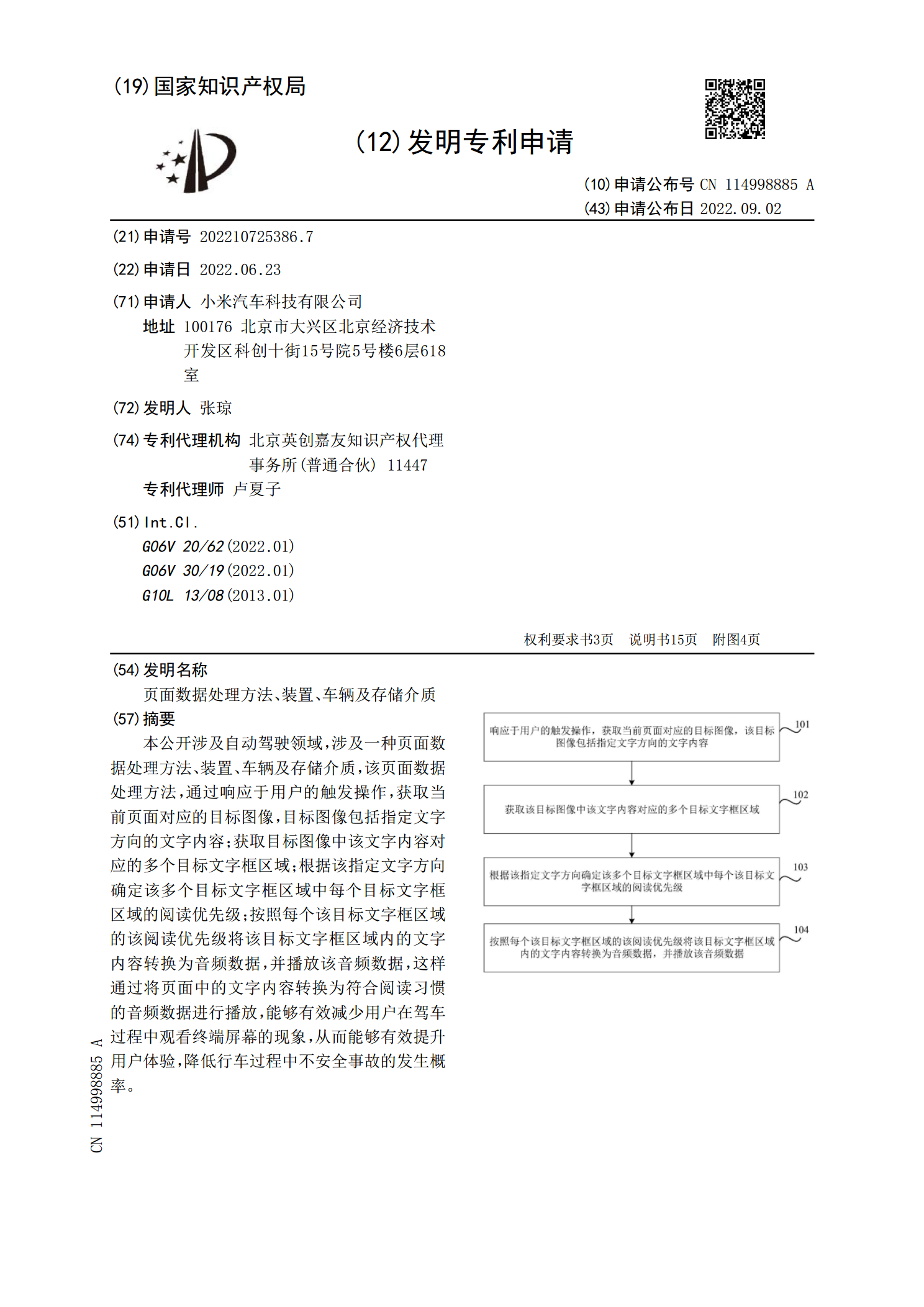
本公开涉及自动驾驶领域,涉及一种页面数据处理方法、装置、车辆及存储介质,该页面数据处理方法,通过响应于用户的触发操作,获取当前页面对应的目标图像,目标图像包括指定文字方向的文字内容;获取目标图像中该文字内容对应的多个目标文字框区域;根据该指定文字方向确定该多个目标文字框区域中每个目标文字框区域的阅读优先级;按照每个该目标文字框区域的该阅读优先级将该目标文字框区域内的文字内容转换为音频数据,并播放该音频数据,这样通过将页面中的文字内容转换为符合阅读习惯的音频数据进行播放,能够有效减少用户在驾车过程中观看终端