
线结构光三维轮廓测量系统的标定方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

线结构光三维轮廓测量系统的标定方法.docx
线结构光三维轮廓测量系统的标定方法摘要:随着工业制造的不断发展,三维轮廓测量技术变得越来越重要。线结构光三维轮廓测量系统是一种常见的测量技术,它能够在较短的时间内获取高精度的三维点云数据。然而,在使用线结构光三维轮廓测量系统时,必须要进行标定,以确保测量结果的准确性。本文将介绍线结构光三维轮廓测量系统的标定方法,包括仪器标定和物体标定。Introduction:三维轮廓测量技术被广泛应用于工业制造、数字医疗、电子游戏和虚拟现实中。线结构光三维轮廓测量系统是一种常见的三维测量技术。该技术通过将一个照相机和一

结构光投影三维轮廓测量系统的标定.docx
结构光投影三维轮廓测量系统的标定近年来,随着数字化时代的到来,三维测量技术成为了科学研究、工业制造以及文化遗产保护等领域中不可或缺的工具。结构光投影三维轮廓测量系统(StructuredLightProjection3DScanningSystem)是一种常见的三维测量技术,它通过投影特定的光斑模式到被测物体表面,并根据反射光线的形态来重建出被测物体的三维轮廓。但是,这种方法需要对相机和光源之间的几何关系进行精确的标定。本文将详细讨论结构光投影三维轮廓测量系统的标定方法。一、结构光投影三维轮廓测量系统的组

结构光投影三维轮廓测量系统的标定的任务书.docx
结构光投影三维轮廓测量系统的标定的任务书任务书一、任务背景在工业制造,生物医学、机器视觉等领域,需要通过三维轮廓测量系统对目标进行精确测量和定位。结构光投影三维轮廓测量系统是一种常用的三维测量方法,它通过投射结构光来得到被测物体的三维点云数据。但是,由于测量系统本身的偏差、误差和毛刺,测量得到的数据具有一定的误差,因此需要对测量系统进行标定,降低测量误差,提高测量的准确性。二、任务目标本次任务的目标是设计并实现一种结构光投影三维轮廓测量系统的标定方法,用于消除测量过程中的误差,提高测量准确性。具体任务包括

基于线结构光测量系统标定的研究.pptx
汇报人:/目录0102系统组成和工作原理系统应用领域系统标定的重要性和必要性03标定方法分类标定步骤和流程标定实验和数据采集标定结果分析和评估04实验设备和工具实验步骤和操作流程实验数据分析和处理实验结果和误差分析05标定参数优化标定算法改进标定精度提高措施标定软件和硬件升级06案例一:工业测量中的应用案例二:表面质量检测中的应用案例三:三维重建和虚拟现实中的应用案例四:其他领域中的应用07新技术和新方法的发展趋势标定精度和可靠性的提高方向系统集成化和智能化的展望未来研究和应用领域拓展汇报人:
结构光三维测量系统标定方法、巡检数据处理方法.pdf
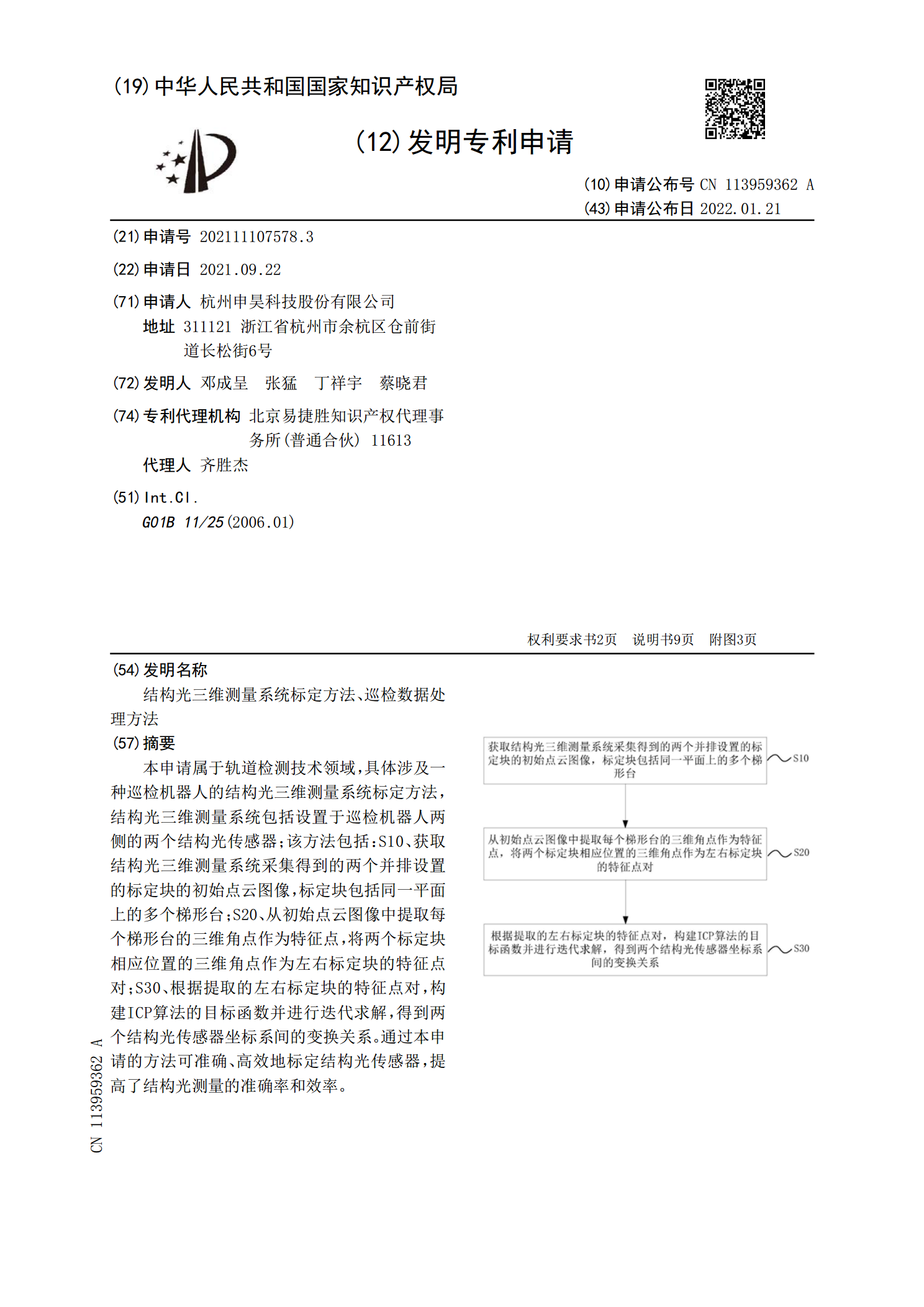
本申请属于轨道检测技术领域,具体涉及一种巡检机器人的结构光三维测量系统标定方法,结构光三维测量系统包括设置于巡检机器人两侧的两个结构光传感器;该方法包括:S10、获取结构光三维测量系统采集得到的两个并排设置的标定块的初始点云图像,标定块包括同一平面上的多个梯形台;S20、从初始点云图像中提取每个梯形台的三维角点作为特征点,将两个标定块相应位置的三维角点作为左右标定块的特征点对;S30、根据提取的左右标定块的特征点对,构建ICP算法的目标函数并进行迭代求解,得到两个结构光传感器坐标系间的变换关系。通过本申请