
一种基于多类型相机的目标定位方法及系统.pdf

书生****66


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于多类型相机的目标定位方法及系统.pdf
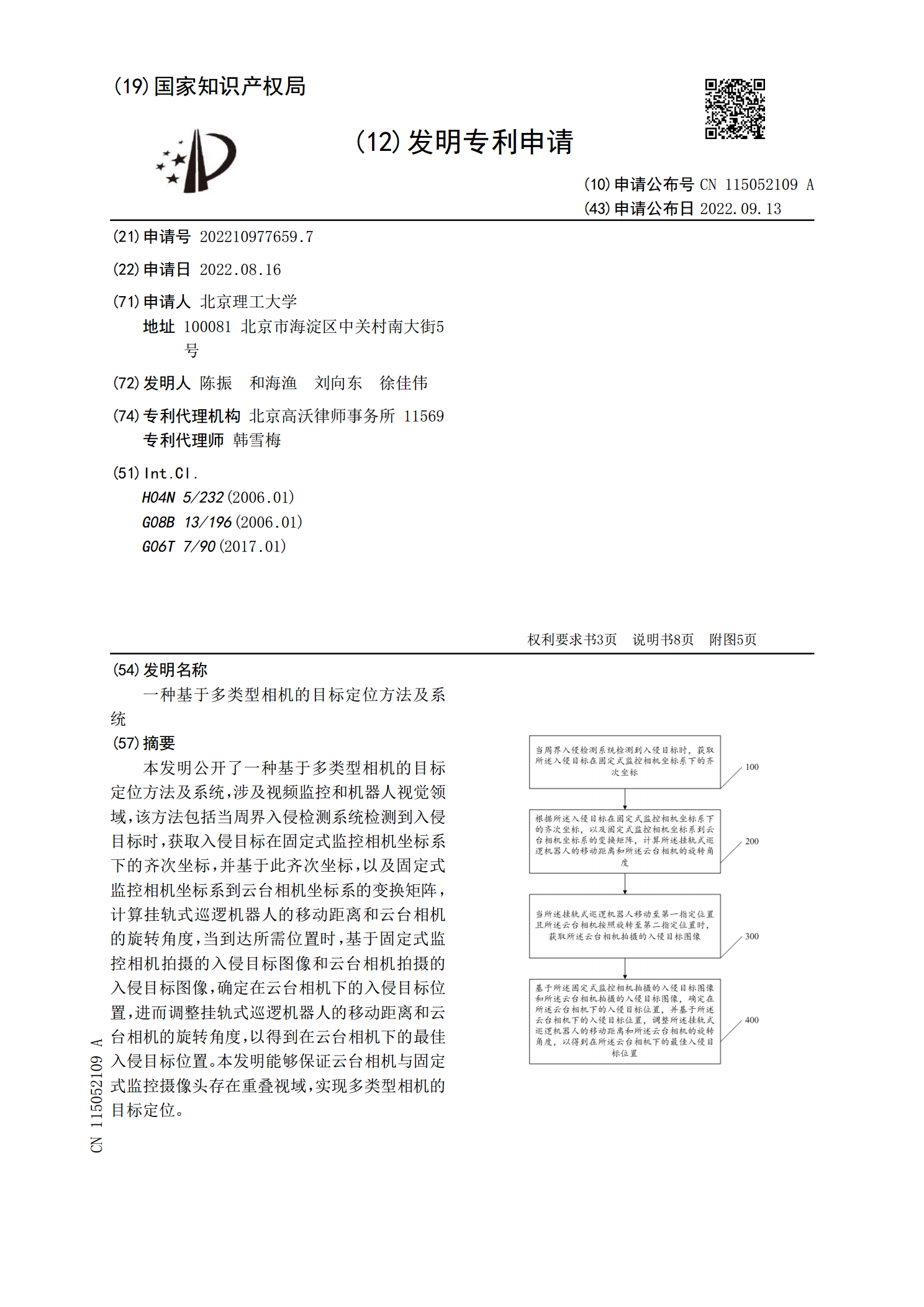
本发明公开了一种基于多类型相机的目标定位方法及系统,涉及视频监控和机器人视觉领域,该方法包括当周界入侵检测系统检测到入侵目标时,获取入侵目标在固定式监控相机坐标系下的齐次坐标,并基于此齐次坐标,以及固定式监控相机坐标系到云台相机坐标系的变换矩阵,计算挂轨式巡逻机器人的移动距离和云台相机的旋转角度,当到达所需位置时,基于固定式监控相机拍摄的入侵目标图像和云台相机拍摄的入侵目标图像,确定在云台相机下的入侵目标位置,进而调整挂轨式巡逻机器人的移动距离和云台相机的旋转角度,以得到在云台相机下的最佳入侵目标位置。本
一种基于单目相机的三维目标定位方法及系统.pdf
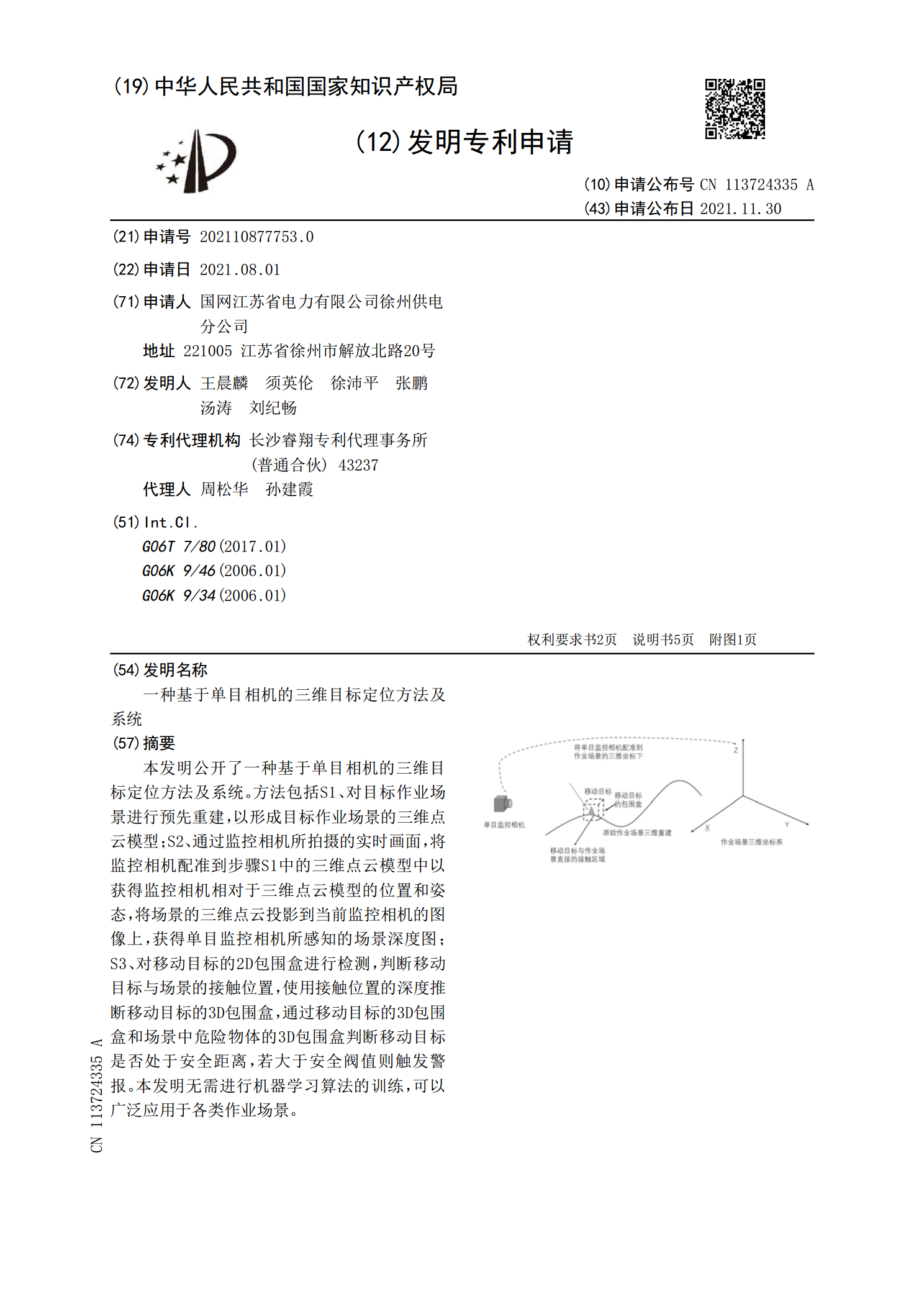
本发明公开了一种基于单目相机的三维目标定位方法及系统。方法包括S1、对目标作业场景进行预先重建,以形成目标作业场景的三维点云模型;S2、通过监控相机所拍摄的实时画面,将监控相机配准到步骤S1中的三维点云模型中以获得监控相机相对于三维点云模型的位置和姿态,将场景的三维点云投影到当前监控相机的图像上,获得单目监控相机所感知的场景深度图;S3、对移动目标的2D包围盒进行检测,判断移动目标与场景的接触位置,使用接触位置的深度推断移动目标的3D包围盒,通过移动目标的3D包围盒和场景中危险物体的3D包围盒判断移动目标

基于多系统多源定位数据融合的海上目标定位方法.pdf
本发明公开了一种基于多系统多源定位数据融合的海上目标定位方法,包括如下步骤:S1、获取全球导航卫星系统的经度、纬度和时间的定位数据;S2、获取惯性导航系统的经度、纬度和时间定位数据;S3、气象传感器获取气压高度计和时钟数据;S4、构建数据矩阵对步骤S1‑S3获取的数据进行紧密数据融合和扩展卡尔曼滤波融合计算和收敛处理;S5、在船舶自动识别系统中采用步骤S4中的数据对海上目标进行定位识别。本发明提供的基于多系统多源定位数据融合的海上目标定位方法,能够极大程度提升航行船舶、海事工程、海洋工程定位数据的连续性、

一种航空相机基于高程数据的实时定位系统及方法.pdf
一种航空相机基于高程数据的实时定位系统及方法,特别针对航空相机中无法获取距离信息情况下的定位装置和方法。利用上位机的大容量数据库,存储任务区域的DEM数据,通过非基于距离信息的粗略定位预估出成像区域的大致地理位置,以预估点为中心向外扩展可能拍到的任务区域,通过万兆网向上位机申请该区域的DEM数据,依据DEM数据从高点到低点进行数据迭代精确定位;在载机飞行过程中,通过航迹预估,利用拍照每条带的回程阶段预先取回下一任务区域数据,反复迭代实现连续高精度定位。本发明中涉及的定位方法,通过航迹预估和数据交互能够在无

一种基于多尺度注意力约束的目标定位方法及系统.pdf
本发明涉及一种基于多尺度注意力约束的目标定位方法及系统,方法包括:对训练图片进行数据增广和缩放,得到多张不同尺度的输入图片;根据输入图片利用神经网络进行预测分类,得到分类类别;根据分类类别确定交叉熵损失函数;对多张不同尺度的输入图片进行融合,确定多张不同尺度的类激活图;根据多张不同尺度的类激活图确定注意力的散度损失函数和定位结果;以多张不同尺度的输入图片为输入,以分类类别为输出,以交叉熵损失函数和散度损失函数为损失函数,利用随机梯度下降法对神经网络的参数进行训练,得到训练好的神经网络;将测试图片输入训练好