
一种基于单目相机的三维目标定位方法及系统.pdf

邻家****mk

1/9
2/9
3/9
4/9
5/9
6/9
7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于单目相机的三维目标定位方法及系统.pdf
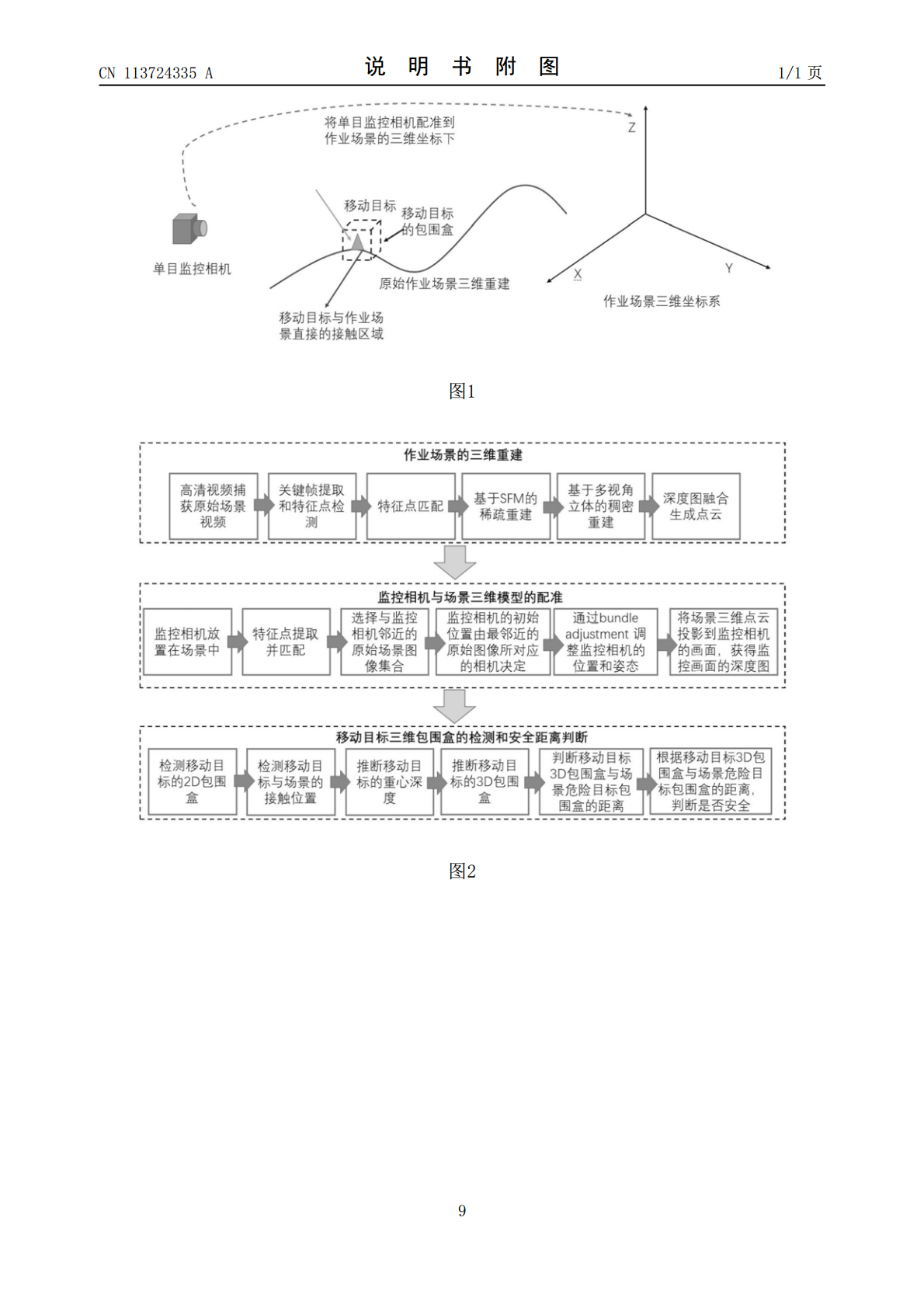
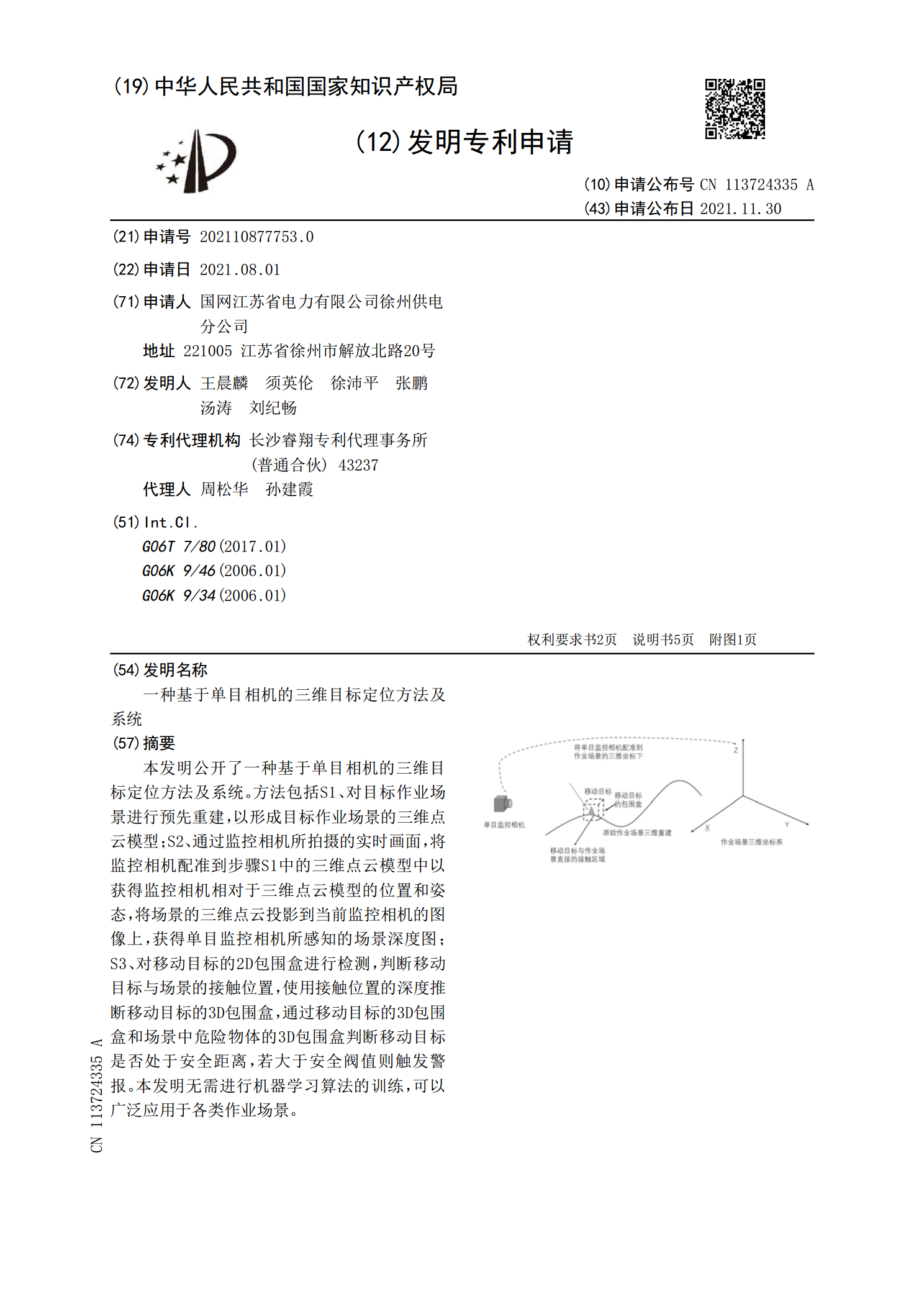
本发明公开了一种基于单目相机的三维目标定位方法及系统。方法包括S1、对目标作业场景进行预先重建,以形成目标作业场景的三维点云模型;S2、通过监控相机所拍摄的实时画面,将监控相机配准到步骤S1中的三维点云模型中以获得监控相机相对于三维点云模型的位置和姿态,将场景的三维点云投影到当前监控相机的图像上,获得单目监控相机所感知的场景深度图;S3、对移动目标的2D包围盒进行检测,判断移动目标与场景的接触位置,使用接触位置的深度推断移动目标的3D包围盒,通过移动目标的3D包围盒和场景中危险物体的3D包围盒判断移动目标
基于单目相机的目标测距方法和系统.pdf
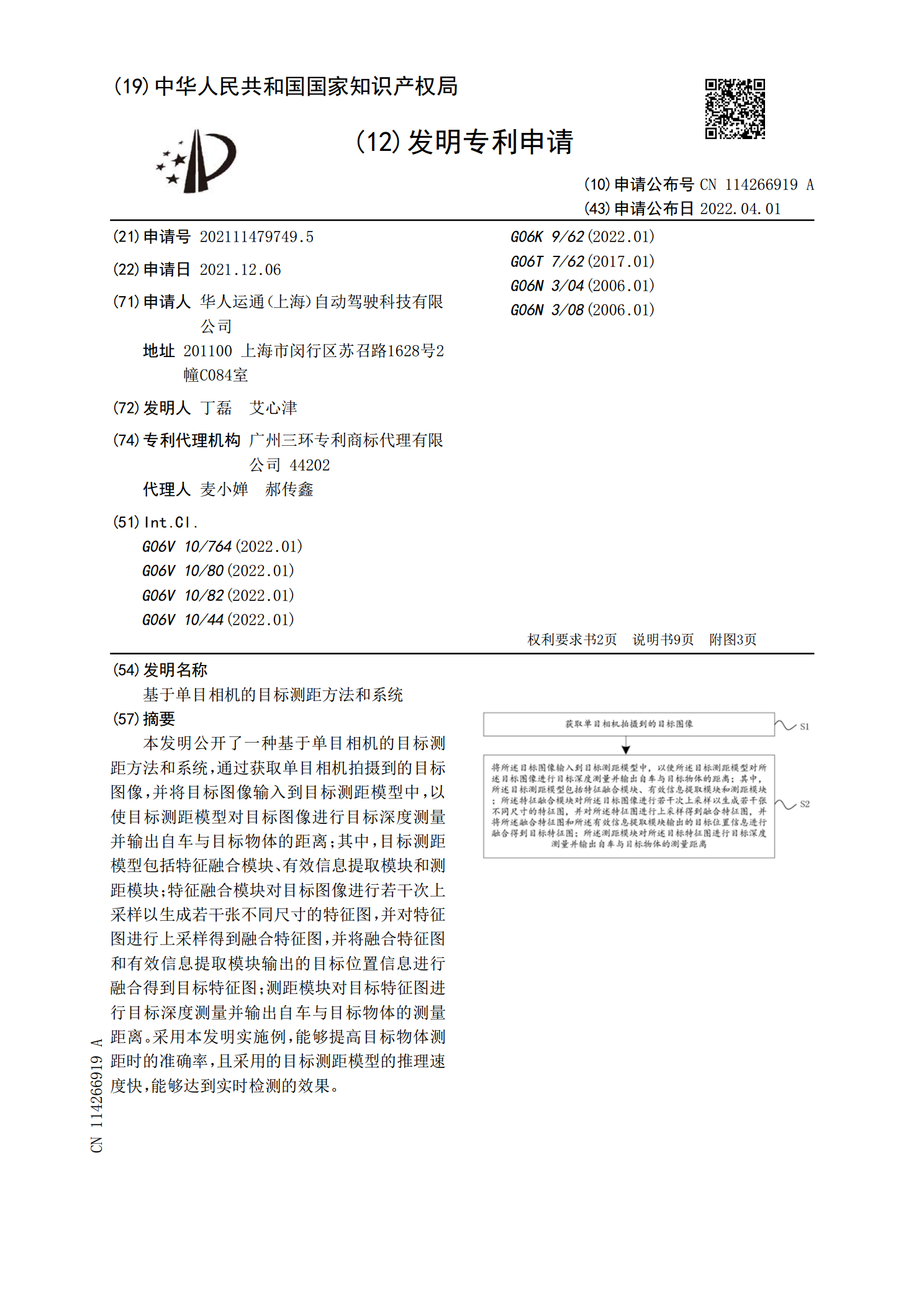
本发明公开了一种基于单目相机的目标测距方法和系统,通过获取单目相机拍摄到的目标图像,并将目标图像输入到目标测距模型中,以使目标测距模型对目标图像进行目标深度测量并输出自车与目标物体的距离;其中,目标测距模型包括特征融合模块、有效信息提取模块和测距模块;特征融合模块对目标图像进行若干次上采样以生成若干张不同尺寸的特征图,并对特征图进行上采样得到融合特征图,并将融合特征图和有效信息提取模块输出的目标位置信息进行融合得到目标特征图;测距模块对目标特征图进行目标深度测量并输出自车与目标物体的测量距离。采用本发明实
一种单目相机图像目标点三维定位方法及装置.pdf
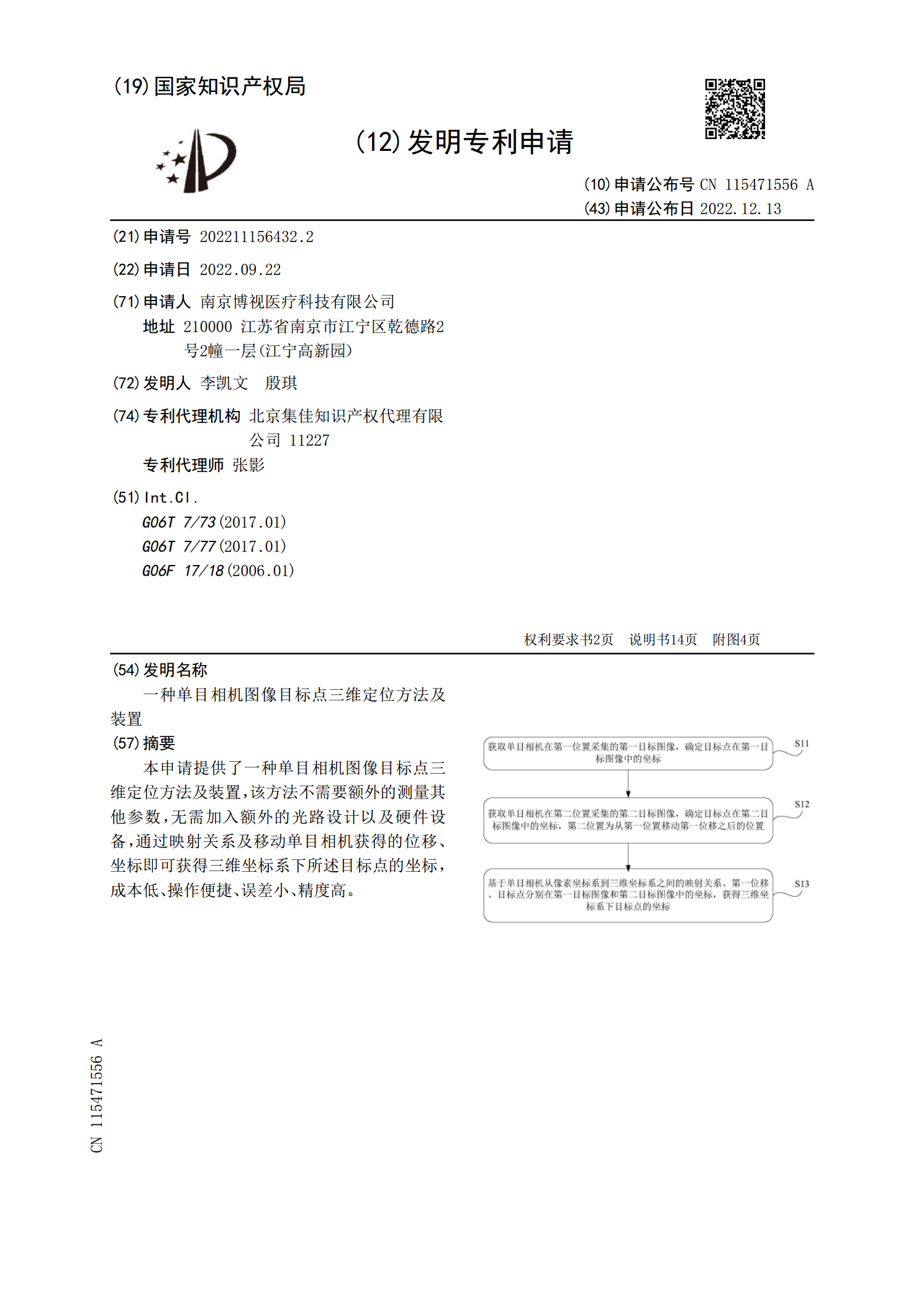
本申请提供了一种单目相机图像目标点三维定位方法及装置,该方法不需要额外的测量其他参数,无需加入额外的光路设计以及硬件设备,通过映射关系及移动单目相机获得的位移、坐标即可获得三维坐标系下所述目标点的坐标,成本低、操作便捷、误差小、精度高。
一种基于单目相机的海面测距方法和系统.pdf
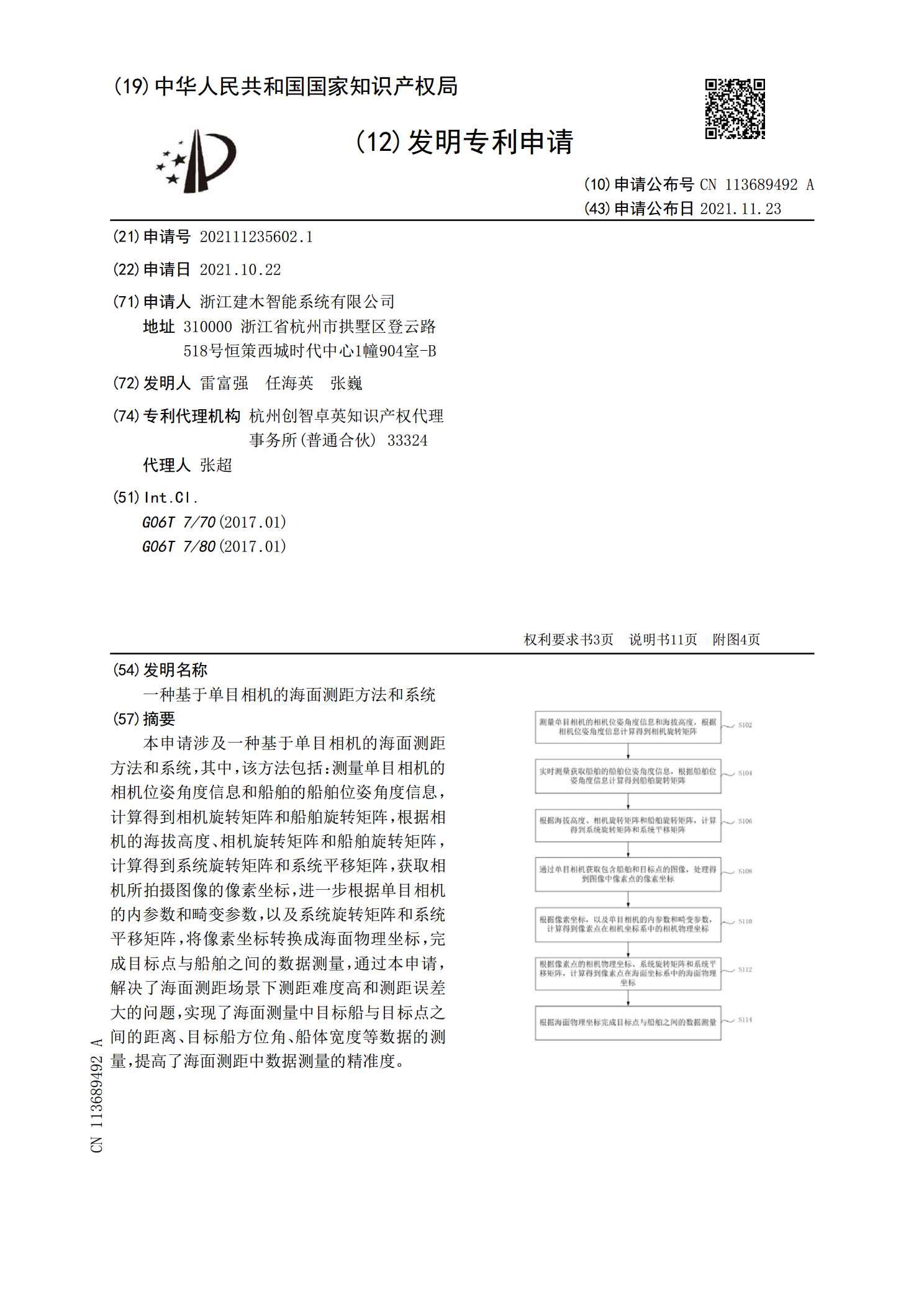
本申请涉及一种基于单目相机的海面测距方法和系统,其中,该方法包括:测量单目相机的相机位姿角度信息和船舶的船舶位姿角度信息,计算得到相机旋转矩阵和船舶旋转矩阵,根据相机的海拔高度、相机旋转矩阵和船舶旋转矩阵,计算得到系统旋转矩阵和系统平移矩阵,获取相机所拍摄图像的像素坐标,进一步根据单目相机的内参数和畸变参数,以及系统旋转矩阵和系统平移矩阵,将像素坐标转换成海面物理坐标,完成目标点与船舶之间的数据测量,通过本申请,解决了海面测距场景下测距难度高和测距误差大的问题,实现了海面测量中目标船与目标点之间的距离、目
一种基于单目相机视觉标靶定位的机械臂引导方法.pdf
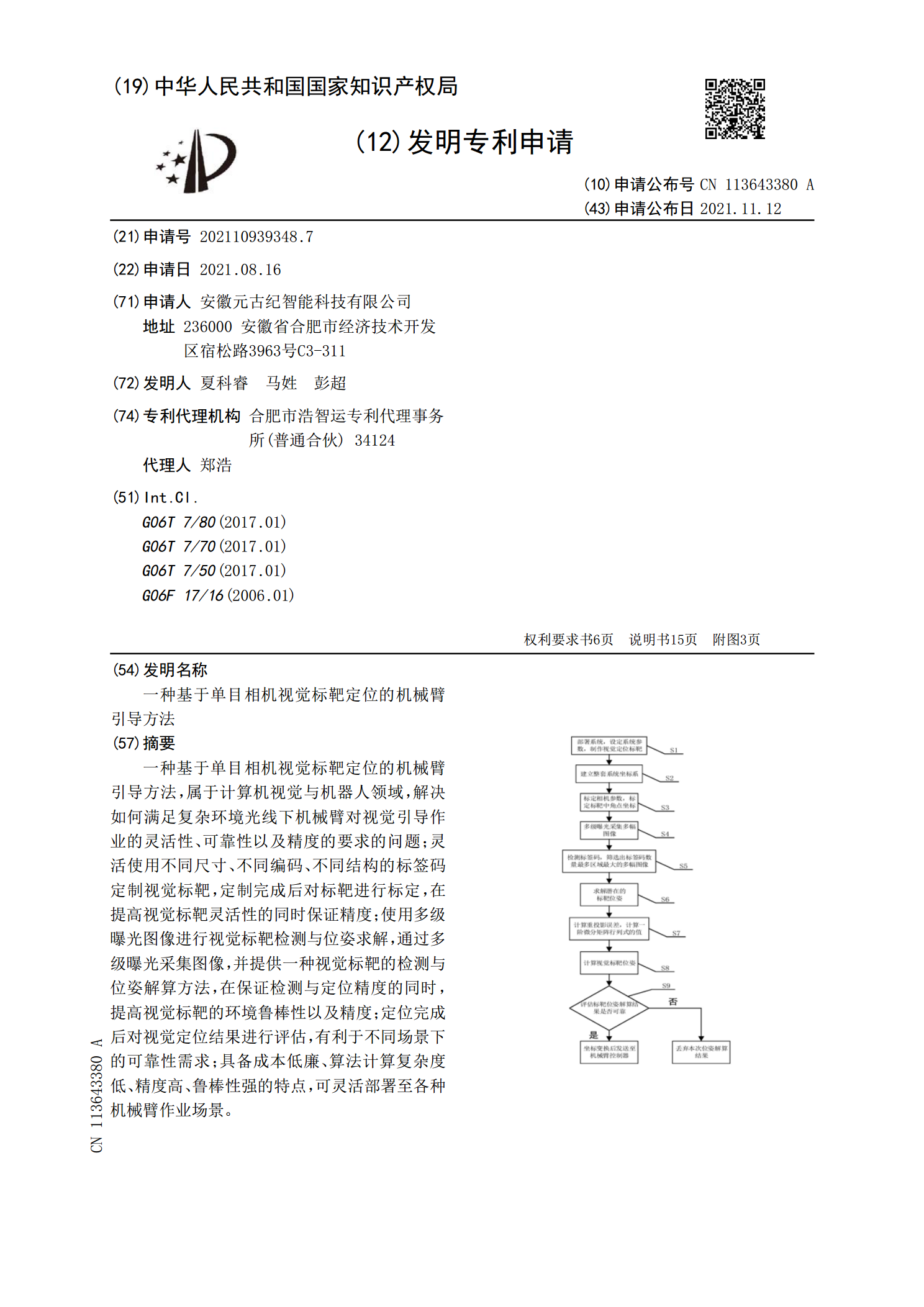
一种基于单目相机视觉标靶定位的机械臂引导方法,属于计算机视觉与机器人领域,解决如何满足复杂环境光线下机械臂对视觉引导作业的灵活性、可靠性以及精度的要求的问题;灵活使用不同尺寸、不同编码、不同结构的标签码定制视觉标靶,定制完成后对标靶进行标定,在提高视觉标靶灵活性的同时保证精度;使用多级曝光图像进行视觉标靶检测与位姿求解,通过多级曝光采集图像,并提供一种视觉标靶的检测与位姿解算方法,在保证检测与定位精度的同时,提高视觉标靶的环境鲁棒性以及精度;定位完成后对视觉定位结果进行评估,有利于不同场景下的可靠性需求;