
基于多系统多源定位数据融合的海上目标定位方法.pdf

兴朝****45

1/10
2/10
3/10
4/10

5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于多系统多源定位数据融合的海上目标定位方法.pdf
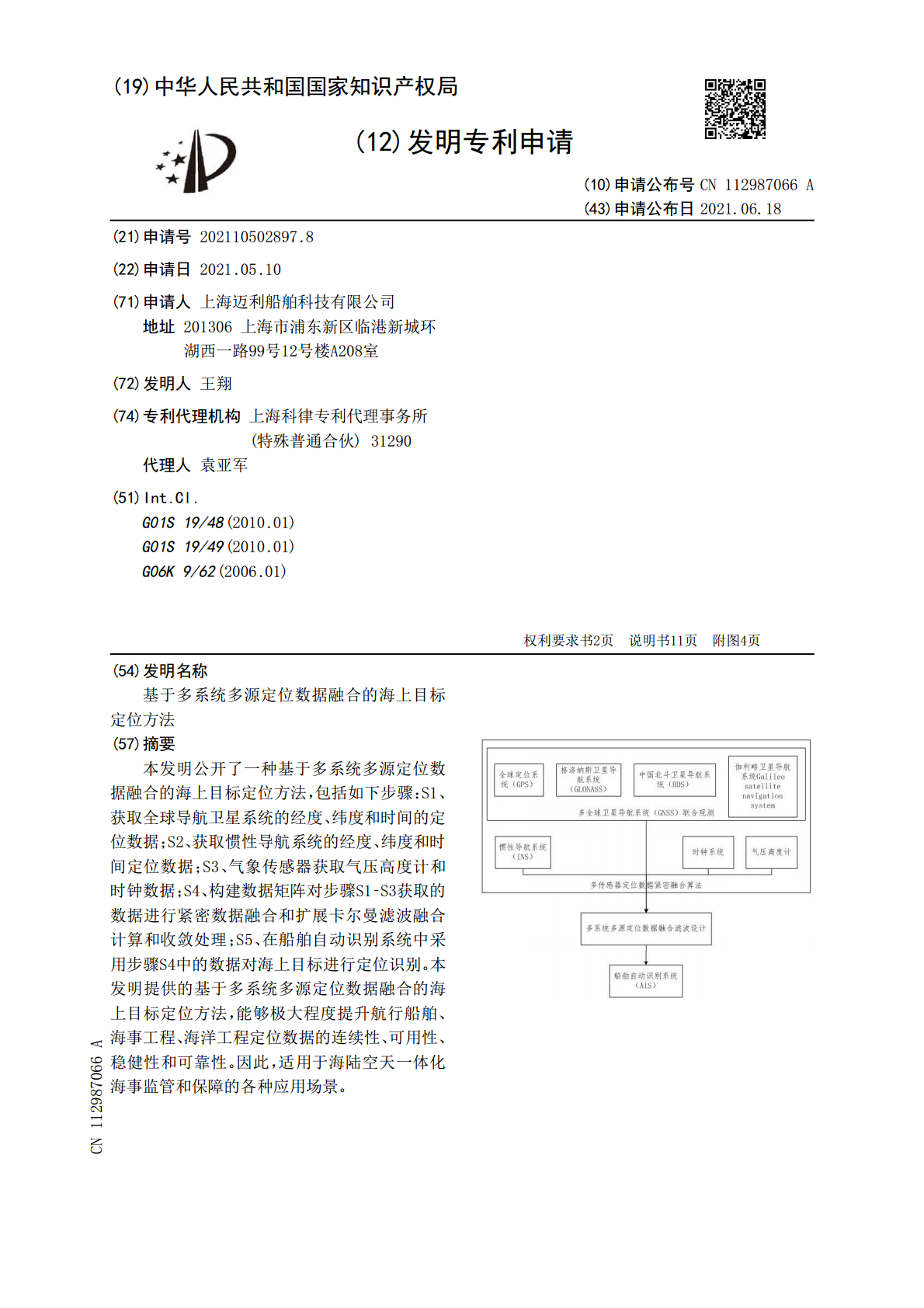
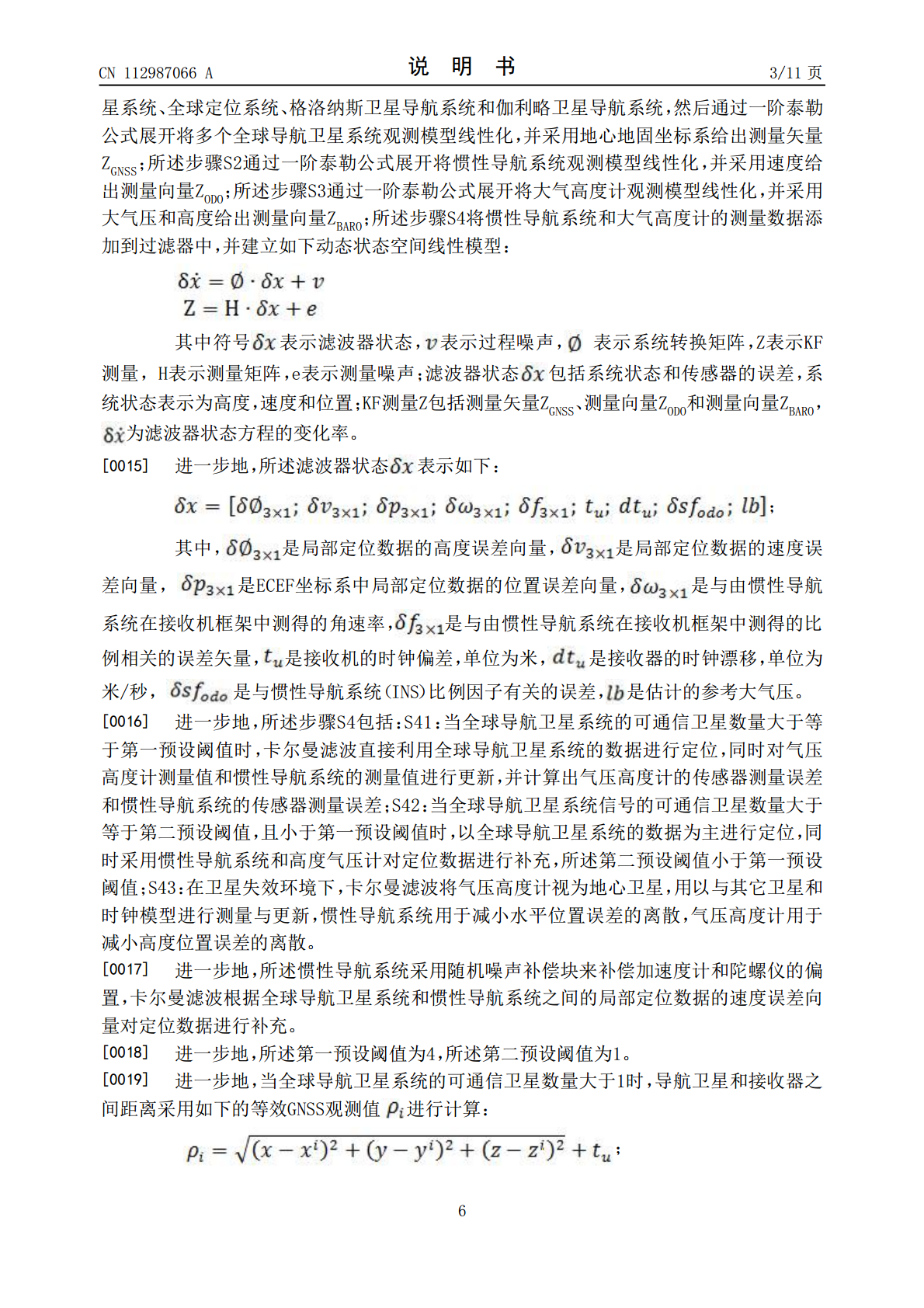
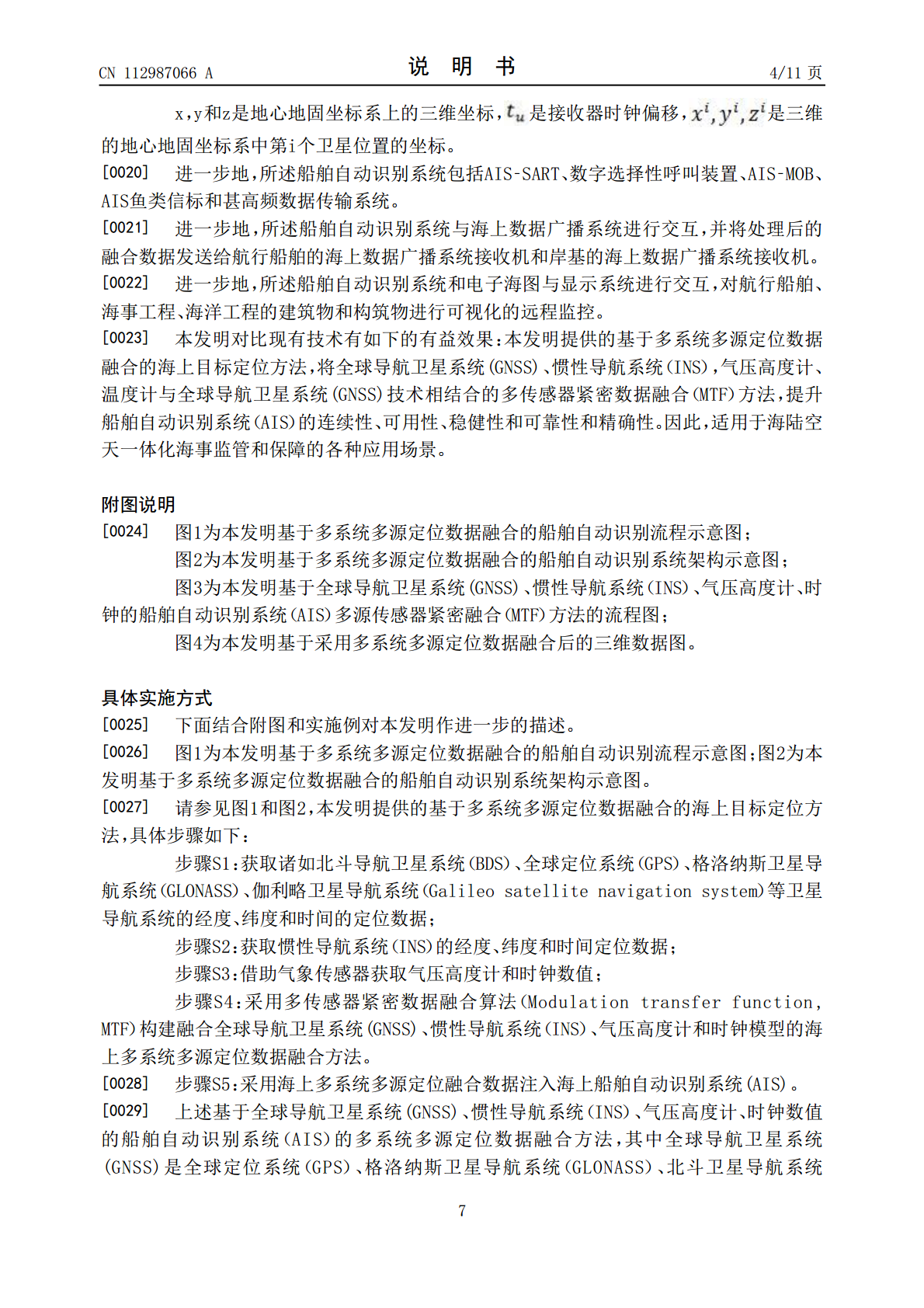
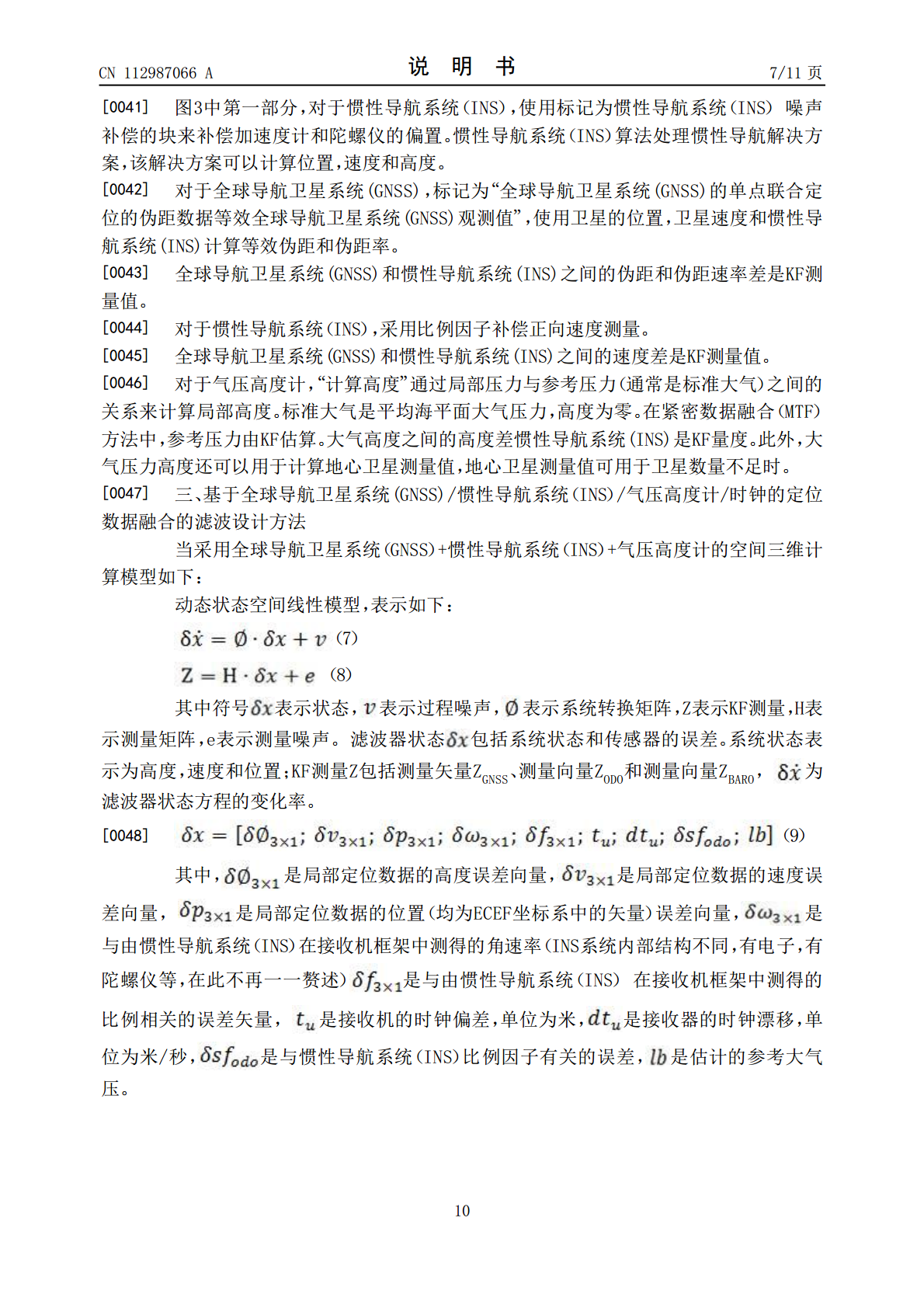
本发明公开了一种基于多系统多源定位数据融合的海上目标定位方法,包括如下步骤:S1、获取全球导航卫星系统的经度、纬度和时间的定位数据;S2、获取惯性导航系统的经度、纬度和时间定位数据;S3、气象传感器获取气压高度计和时钟数据;S4、构建数据矩阵对步骤S1‑S3获取的数据进行紧密数据融合和扩展卡尔曼滤波融合计算和收敛处理;S5、在船舶自动识别系统中采用步骤S4中的数据对海上目标进行定位识别。本发明提供的基于多系统多源定位数据融合的海上目标定位方法,能够极大程度提升航行船舶、海事工程、海洋工程定位数据的连续性、

基于多源数据融合的目标定位方法、系统及存储介质.pdf
本发明涉及目标识别追踪技术领域,公开了基于多源数据融合的目标定位方法、系统及存储介质,该方法包括:S1:录入监控区的场景信息;S2:识别是否有目标进入监控区;S3:采集监控区内目标的图像信息,结合监控区的场景信息,对目标所处位置进行判断,得出目标的第一定位;S4:采集监控区内目标方向的声音信息,识别声音内容,结合监控区的场景信息,对目标所处位置进行判断,得出目标的第二定位;S5:根据第二定位的信息对第一定位进行修正,得到精确定位。通过在摄像头采集图像识别目标定位的基础上,利用采集的目标方向的声音信息对目标

一种基于多传感器数据融合的定位系统及定位方法.pdf
本发明公开了一种基于多传感器数据融合的定位系统及定位方法,通过在码盘架上固定编码器和全向轮,全向轮的主转动轴与编码器转轴连接,固定支架上固定有三个码盘架,三个码盘架上的三个编码器转轴轴线所在竖直平面之间的夹角均为120°,三个全向轮同时接触运动地面;采用三码盘全场定位系统,当移动机器人运动时,三个全向轮被动旋转,能够准确获取机器人运动全方位移动数据,从而减小因陀螺仪的角度漂移而导致定位不准的影响,通过三个码盘坐标的更新公式获取待定位机器人在三个自由度的变化情况,实现相对定位,提高了机器人在高速行驶以及不同
基于分层优化的多源融合定位方法.pptx
汇报人:CONTENTS添加章节标题分层优化方法分层优化的概念分层优化的原理分层优化的应用场景分层优化的优势多源融合定位方法多源融合定位的概念多源融合定位的原理多源融合定位的常见方法多源融合定位的优势基于分层优化的多源融合定位方法方法概述分层优化的实现方式多源融合定位的实现方式方法的应用场景和优势实验验证与结果分析实验设置与数据采集实验结果展示与分析结果与现有方法的比较方法的局限性与未来工作方向汇报人:

基于多源数据融合技术的输电线路故障定位方法.docx
基于多源数据融合技术的输电线路故障定位方法基于多源数据融合技术的输电线路故障定位方法摘要:输电线路是电力系统的重要组成部分,线路故障的定位对于电力系统的安全运行至关重要。然而,由于传统的故障定位方法存在定位精度低、容易受到环境干扰等问题,基于多源数据融合技术的输电线路故障定位方法逐渐引起了广泛关注。本文针对这一问题进行了研究,提出了一种基于多源数据融合技术的输电线路故障定位方法,并通过实验验证了该方法的有效性和可行性。关键词:输电线路;故障定位;多源数据融合;定位精度一、引言输电线路是电力系统的主要组成部