
电机控制方法、电机控制器、电驱动系统及新能源汽车.pdf

努力****骞北

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

电机控制方法、电机控制器、电驱动系统及新能源汽车.pdf
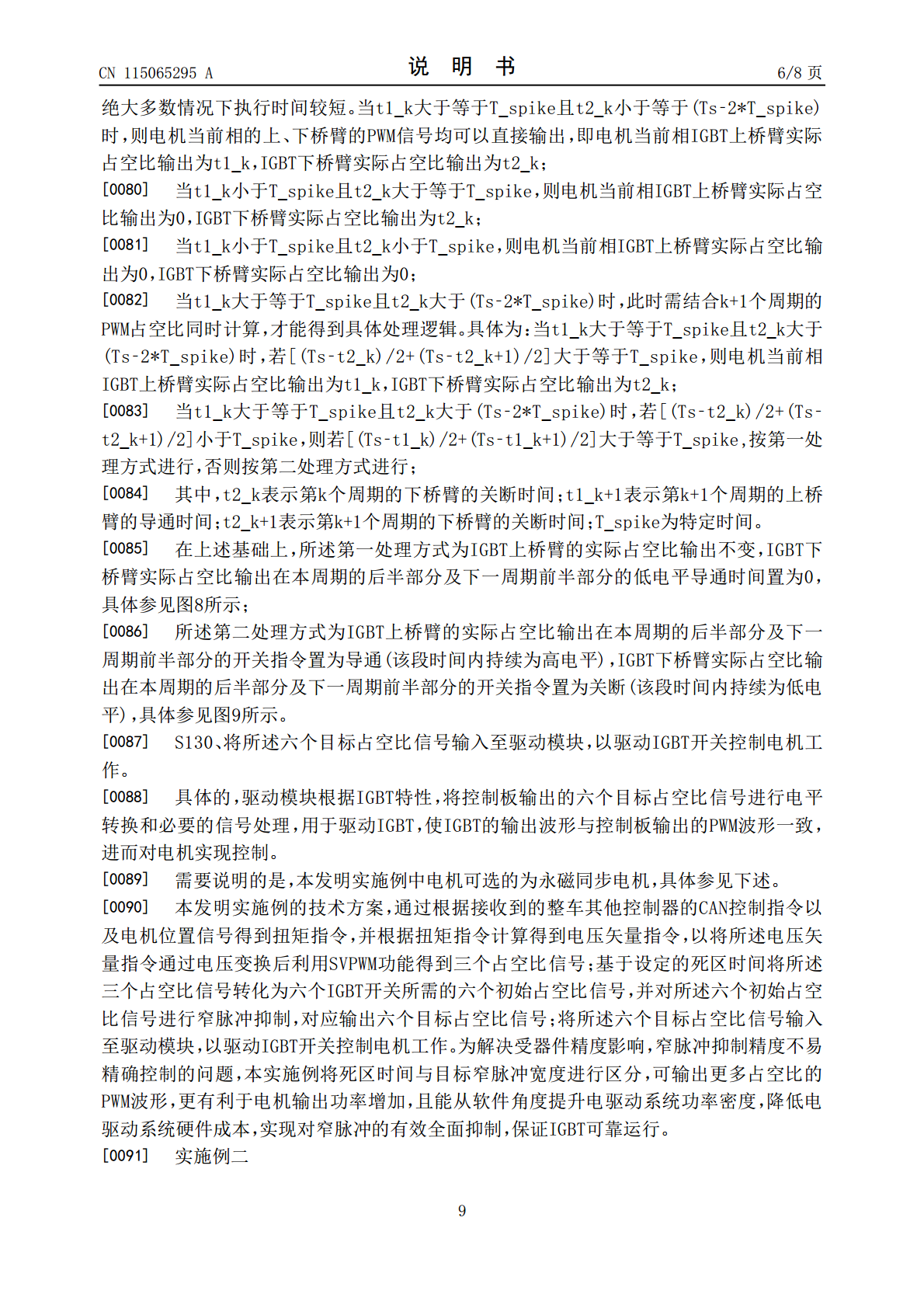
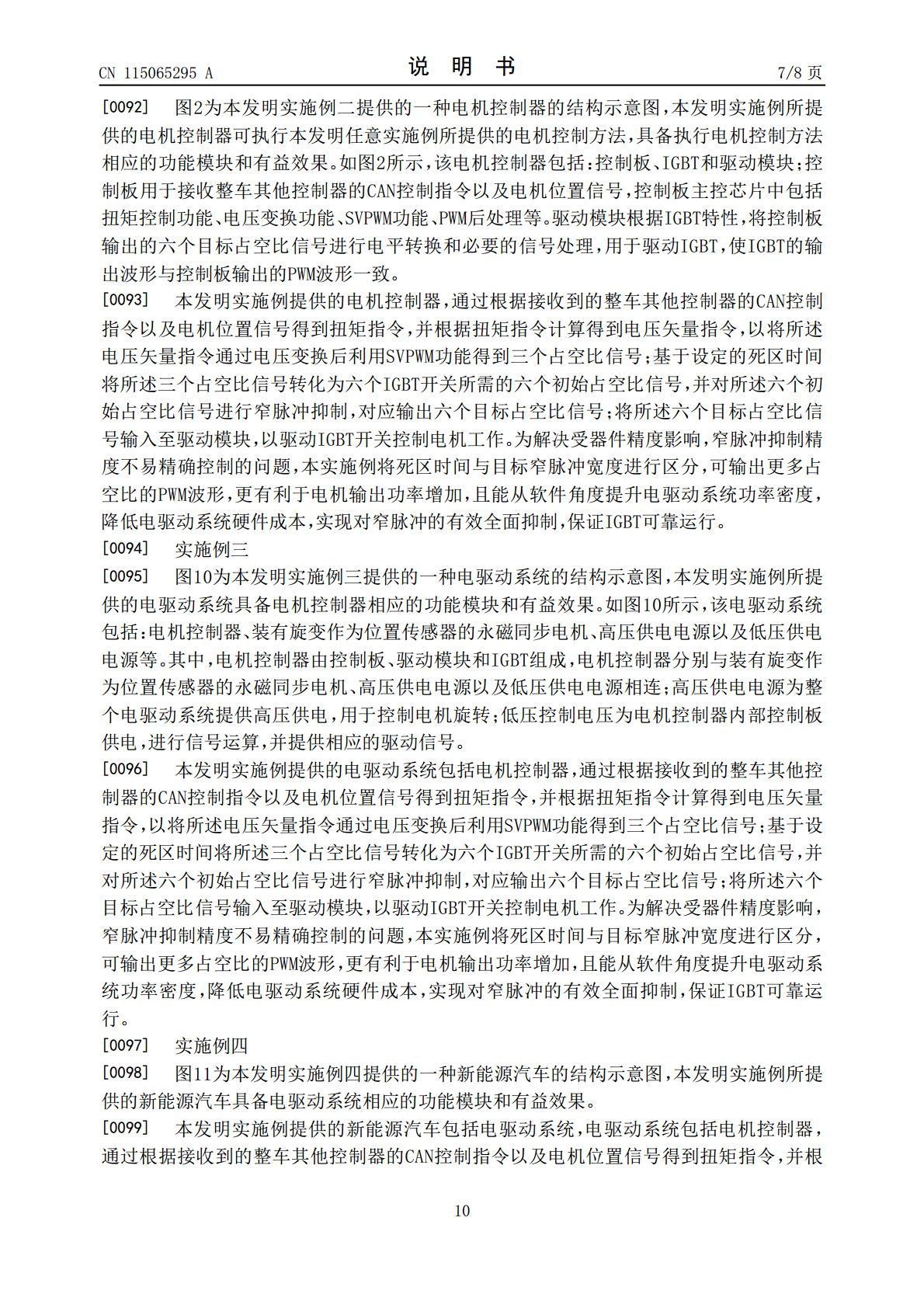
本发明公开了一种电机控制方法、电机控制器、电驱动系统及新能源汽车。该电机控制方法包括:根据接收到的整车其他控制器的CAN控制指令以及电机位置信号得到扭矩指令,并根据扭矩指令计算得到电压矢量指令,以将所述电压矢量指令通过电压变换后利用SVPWM功能得到三个占空比信号;基于设定的死区时间将所述三个占空比信号转化为六个IGBT开关所需的六个初始占空比信号,并对所述六个初始占空比信号进行窄脉冲抑制,对应输出六个目标占空比信号;将所述六个目标占空比信号输入至驱动模块,以驱动IGBT开关控制电机工作。以解决受器件精度

新能源汽车驱动电机及控制系统.ppt
第四章驱动电机及控制系统驱动电机系统是车辆行驶的主要执行机构,其特性决定了车辆的主要性能指标,直接影响车辆动力性、经济性和用户驾乘感受。可见,驱动电机系统是纯电动汽车中十分重要的部件。驱动电机系统由驱动电机、驱动电机控制器构成,通过高低压线束、冷却管路,与整车其它系统作电气和散热连接.整车控制器(VCU)根据驾驶员意图发出各种指令,电机控制器响应并反馈,实时调整驱动电机输出,以实现整车的怠速、前行、倒车、停车、能量回收以及驻坡等功能。电机控制器另一个重要功能是通信和保护,实时进行状态和故障检测,保护驱动电
新能源汽车驱动电机控制器反时限降额方法.pdf
本发明公开了一种新能源汽车驱动电机控制器反时限降额方法,包括分别采集驱动电机不同扭矩下的电机控制器的输出电流;检测不同的所述输出电流各自的持续时间;确定所述输出电流下电机控制器所允许工作的最大时间;计算所述持续时间与最大时间的比值得到工作时间比值;将大于额定电流的所述输出电流的所述工作时间比值进行累加计算,并将小于额定电流的所述输出电流的工作时间比值进行累减计算;计算所得数值大于等于1时,使所述电机控制器降额。本发明根据电驱工作过程中,电机控制器对不同工作电流值的工作时间进行累加及累减,当达到设定时间后,
双电机控制器和电驱动系统.pdf
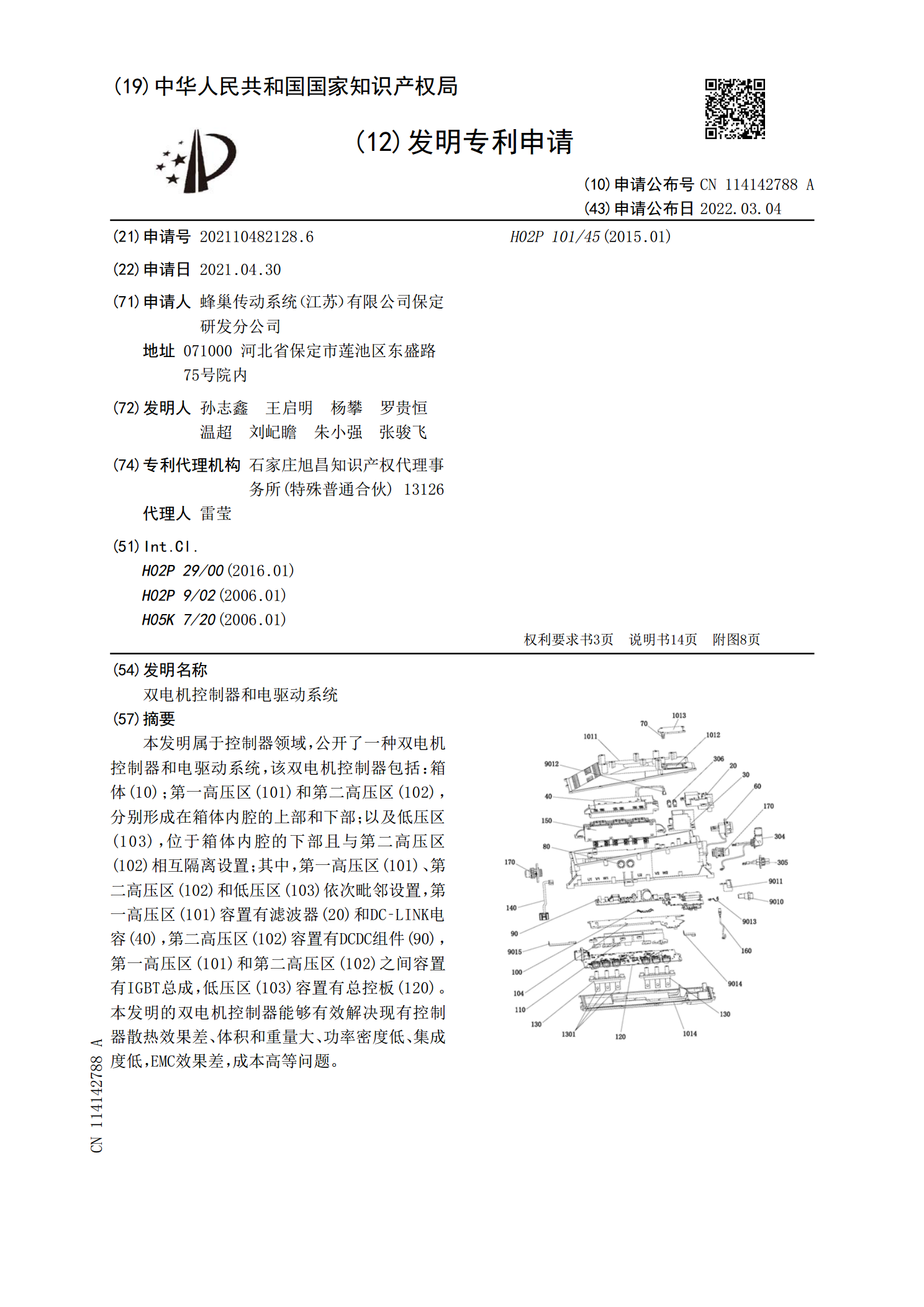
本发明属于控制器领域,公开了一种双电机控制器和电驱动系统,该双电机控制器包括:箱体(10);第一高压区(101)和第二高压区(102),分别形成在箱体内腔的上部和下部;以及低压区(103),位于箱体内腔的下部且与第二高压区(102)相互隔离设置;其中,第一高压区(101)、第二高压区(102)和低压区(103)依次毗邻设置,第一高压区(101)容置有滤波器(20)和DC‑LINK电容(40),第二高压区(102)容置有DCDC组件(90),第一高压区(101)和第二高压区(102)之间容置有IGBT总成,
一种汽车驱动电机的电机控制器.pdf
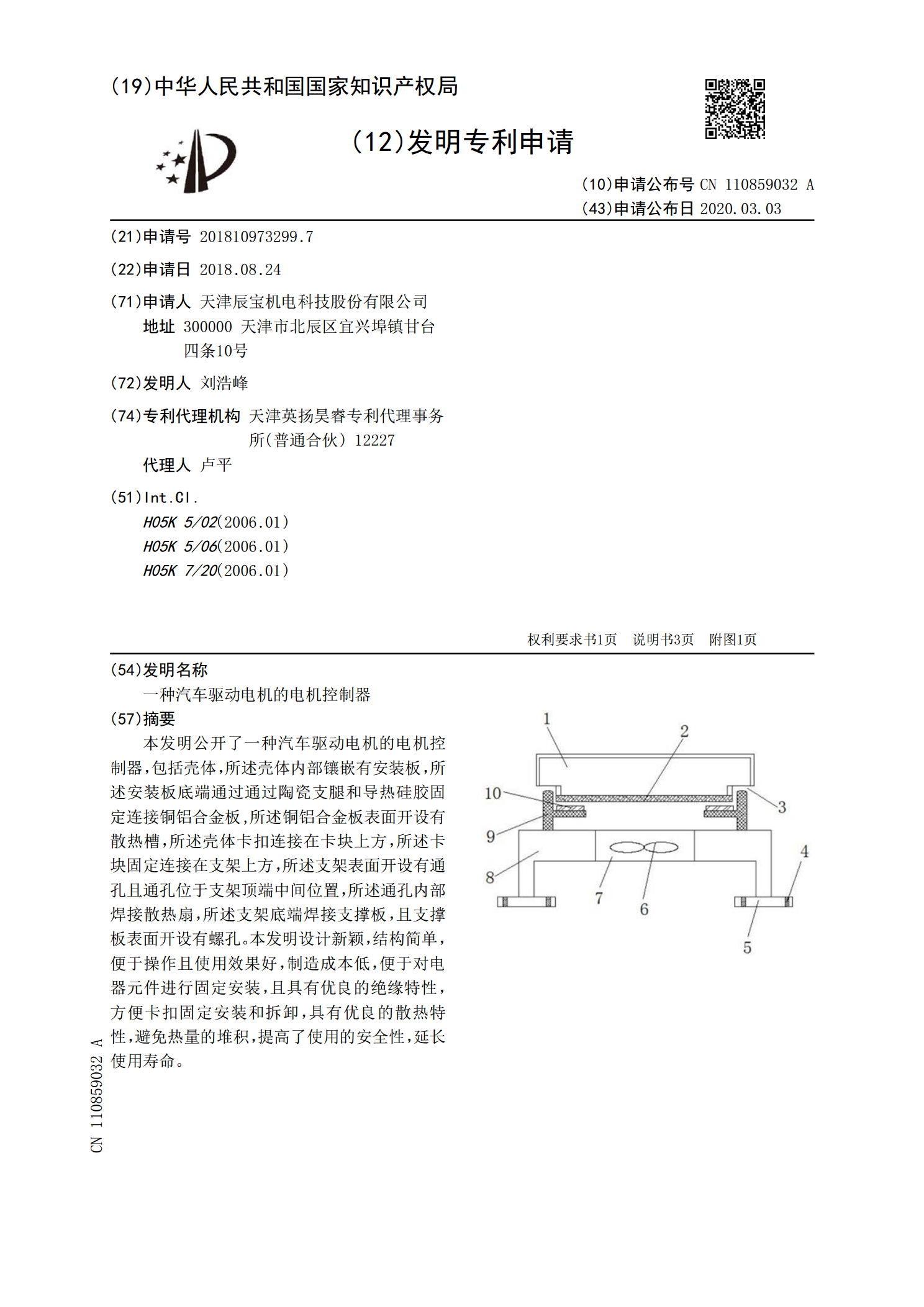
本发明公开了一种汽车驱动电机的电机控制器,包括壳体,所述壳体内部镶嵌有安装板,所述安装板底端通过通过陶瓷支腿和导热硅胶固定连接铜铝合金板,所述铜铝合金板表面开设有散热槽,所述壳体卡扣连接在卡块上方,所述卡块固定连接在支架上方,所述支架表面开设有通孔且通孔位于支架顶端中间位置,所述通孔内部焊接散热扇,所述支架底端焊接支撑板,且支撑板表面开设有螺孔。本发明设计新颖,结构简单,便于操作且使用效果好,制造成本低,便于对电器元件进行固定安装,且具有优良的绝缘特性,方便卡扣固定安装和拆卸,具有优良的散热特性,避免热量