
一种基于双目视觉的机器人转载自动定位方法.pdf

An****99


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于双目视觉的机器人转载自动定位方法.pdf
本发明涉及一种基于双目视觉的机器人转载自动定位方法,包括:步骤一:抓取相机分别检测并确定对应吊孔中心三维坐标;步骤二:将与第二抓取相机对应的吊孔中心位置转换至第一抓取相机坐标系下;步骤三:定位箱体上侧中心位置;步骤四:进行机器人运行轨迹规划;步骤五:吊具与箱体锁定;步骤六:箱体移动至落放平台上方;步骤七:落放相机分别检测并确定落放平台上对应定位支座中心三维坐标;步骤八:将与第二落放相机对应的定位支座中心位置转换至第一落放相机的坐标系下;步骤九:定位箱体下侧中心位置;步骤十:进行机器人运行轨迹规划;步骤十一
一种基于双目视觉的插座定位方法.pdf
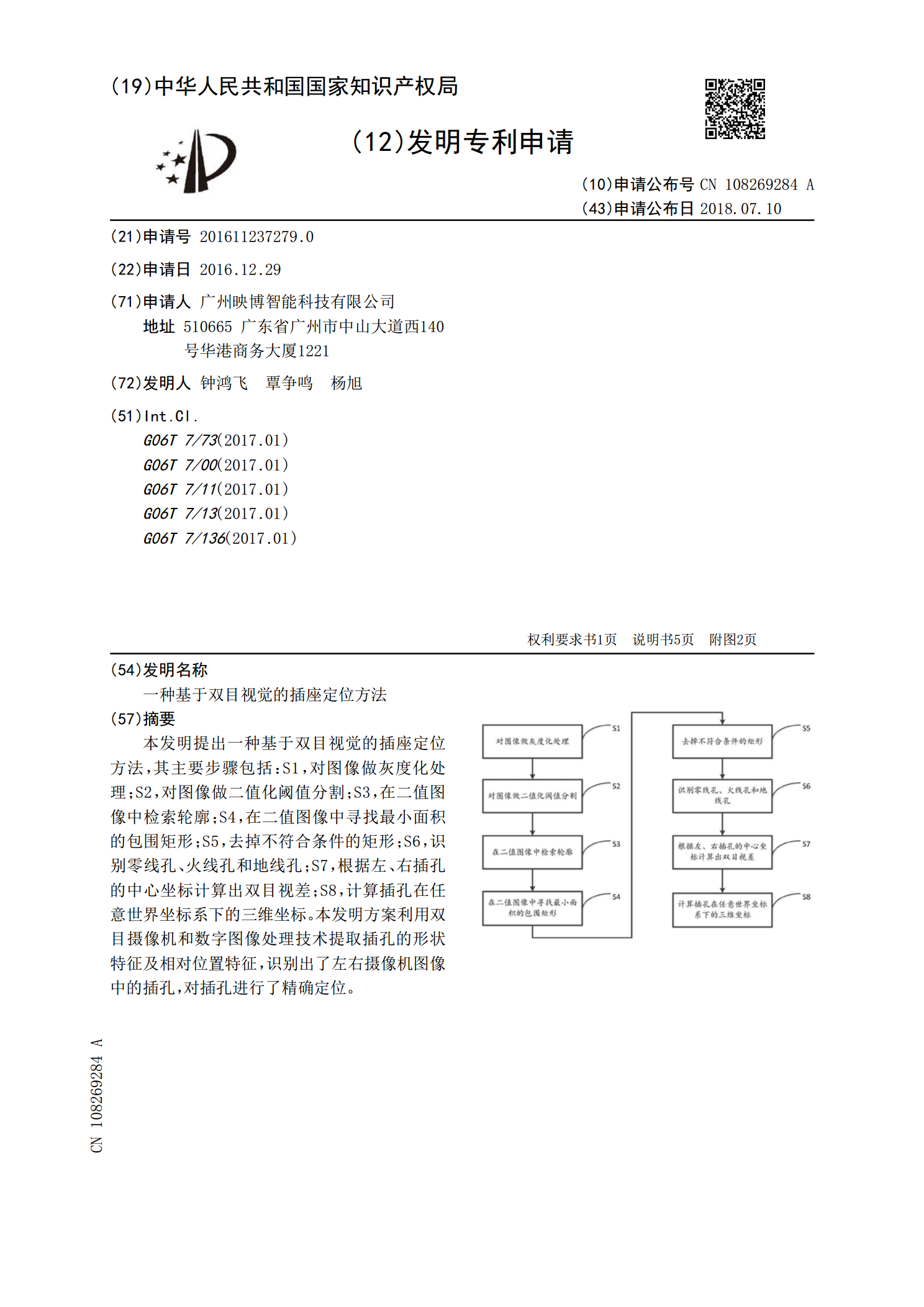
本发明提出一种基于双目视觉的插座定位方法,其主要步骤包括:S1,对图像做灰度化处理;S2,对图像做二值化阈值分割;S3,在二值图像中检索轮廓;S4,在二值图像中寻找最小面积的包围矩形;S5,去掉不符合条件的矩形;S6,识别零线孔、火线孔和地线孔;S7,根据左、右插孔的中心坐标计算出双目视差;S8,计算插孔在任意世界坐标系下的三维坐标。本发明方案利用双目摄像机和数字图像处理技术提取插孔的形状特征及相对位置特征,识别出了左右摄像机图像中的插孔,对插孔进行了精确定位。

一种基于双目视觉的定位方法及装置.pdf
本发明公开了一种基于双目视觉的定位方法及装置,应用于电力巡检机器人,方法包括以下步骤:分别采集场景的可见光图像和红外图像;分别对可见光图像和红外图像进行轮廓特征提取,获取第一轮廓特征和第二轮廓特征;分别对第一轮廓特征和第二轮廓特征进行SIFT特征提取,获取可见光图像SIFT特征点和红外图像SIFT特征点;将可见光图像SIFT特征点和红外图像SIFT特征点进行匹配,校准可见光图像SIFT特征点和红外图像SIFT特征点位置,将可见光图像和红外图像进行融合,得到融合后的融合图像;通过将所述融合图像进行模板匹配,

基于双目视觉的移动机器人自定位方法研究.docx
基于双目视觉的移动机器人自定位方法研究基于双目视觉的移动机器人自定位方法研究摘要:移动机器人的自定位是机器人领域中一项重要的研究课题。本论文主要研究基于双目视觉的移动机器人自定位方法。首先介绍了传统的移动机器人自定位方法,接着详细介绍了双目视觉技术的原理和特点,针对双目视觉在自定位中存在的问题,提出了一种改进的方法。通过实验验证,本方法在移动机器人自定位中具有良好的性能和准确度。关键词:移动机器人;自定位;双目视觉;定位精度;方法改进一、引言移动机器人的自定位是指机器人在未知环境中通过感知和计算确定自身在

基于双目视觉的快速定位与测距方法.docx
基于双目视觉的快速定位与测距方法基于双目视觉的快速定位与测距方法摘要:随着机器视觉的快速发展,双目视觉作为一种常用的三维测量方法,被广泛应用于机器人导航、图像重建等领域。本文所研究的基于双目视觉的快速定位与测距方法,旨在实现对空间目标的快速定位和测量。使用两个相机进行双目视觉系统的构建,并通过计算得到目标的位置和距离。本文通过介绍双目视觉的原理及其重要性,详细阐述了基于双目视觉的快速定位与测距方法的步骤和技术,包括图像采集与预处理、特征提取与匹配等。最后,通过实验验证了该方法的可行性和准确性。关键词:双目