
智能网联汽车测试系统及方法.pdf

雨巷****彦峰

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

智能网联汽车测试系统及方法.pdf
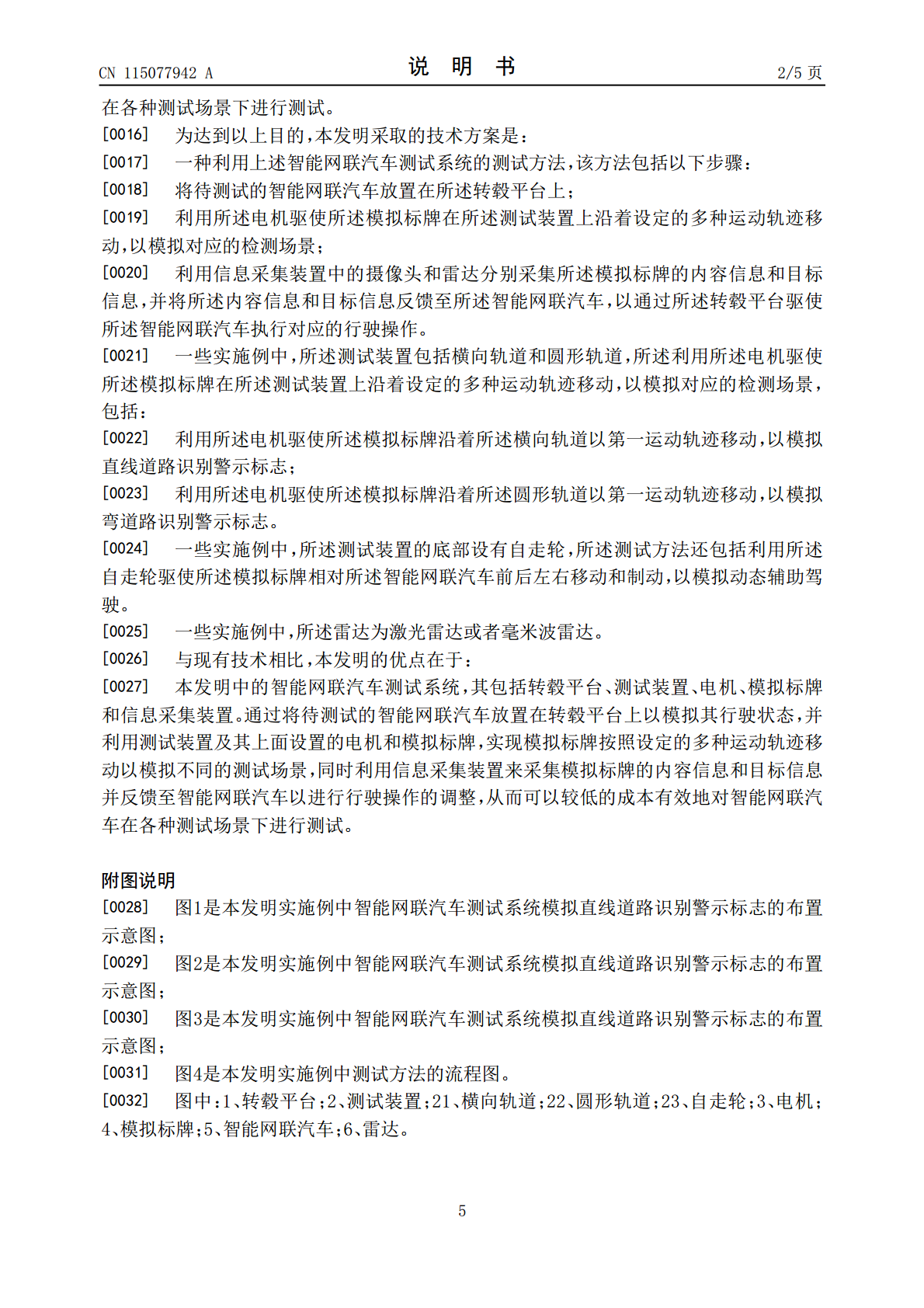
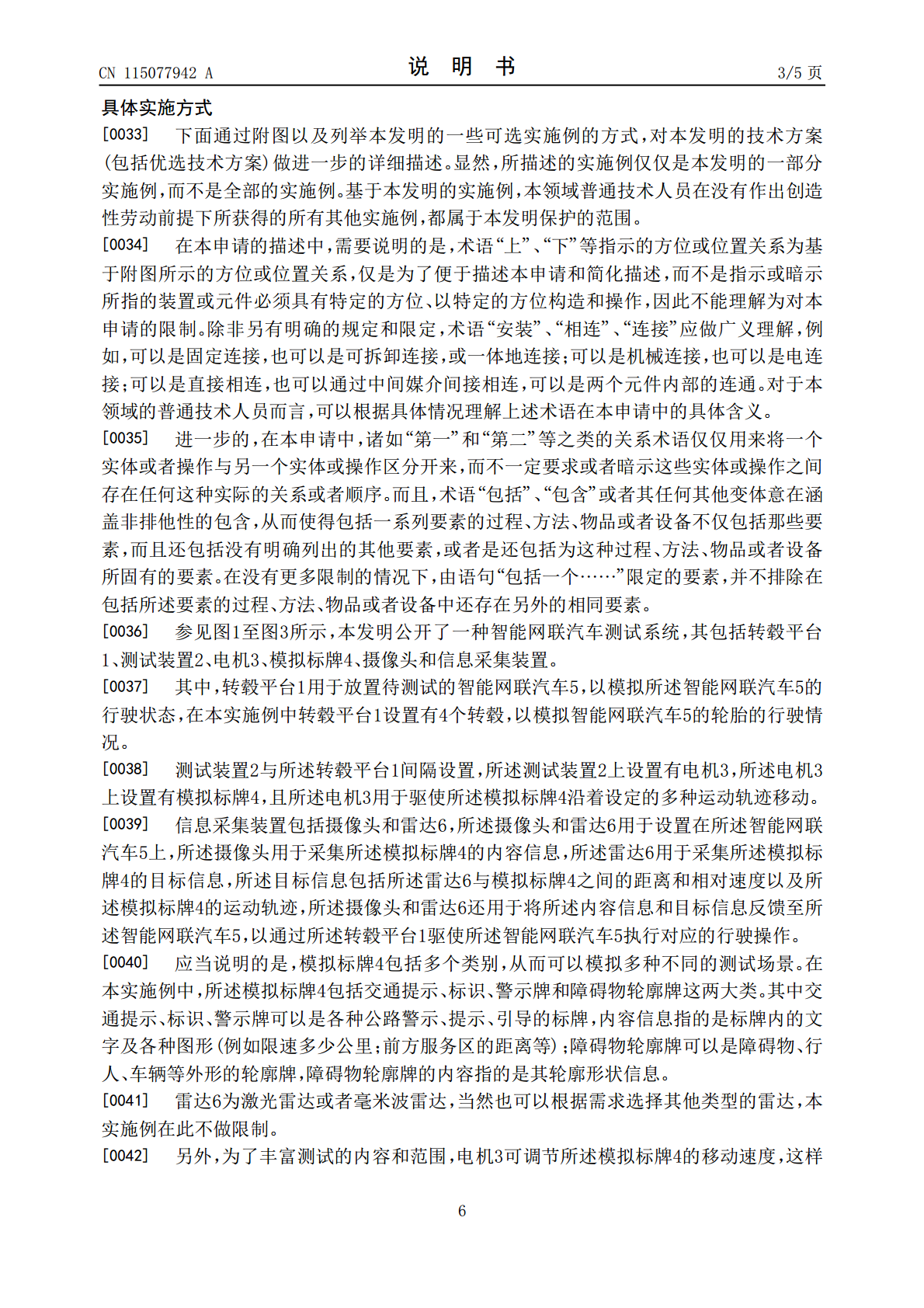
本发明公开了一种智能网联汽车测试系统及方法,涉及智能网联汽车的测试与标定技术领域,智能网联汽车测试系统包括:转毂平台,其用于放置待测试的智能网联汽车,以模拟智能网联汽车的行驶状态;测试装置,其与转毂平台间隔设置,测试装置上设置有电机,电机上设置有模拟标牌,且电机用于驱使模拟标牌沿着设定的多种运动轨迹移动;以及信息采集装置,其包括摄像头和雷达,摄像头用于采集模拟标牌的内容信息,雷达用于采集模拟标牌的目标信息,摄像头和雷达还用于将内容信息和目标信息反馈至智能网联汽车,以通过转毂平台驱使智能网联汽车执行对应的行

智能网联汽车无线通信系统在环测试方法.pdf
本发明公开了智能网联汽车无线通信系统在环测试方法;包括如下步骤:1、信道模拟,针对智能网联汽车交通场景中不同要素对信号传播的影响,对信号传播的损耗和衰落进行动态建模,以对无线通信信道进行模拟;2、性能测试,对智能网联汽车所使用的无线通信系统的无线通信性能进行测试,包括静态测试和动态测试;3、性能评价,根据智能网联汽车所使用的无线通信系统在静态环境和动态环境下的数据收发性能,对智能网联汽车所使用的无线通信系统进行性能评价。
智能网联汽车智能座舱系统 习题答案.pdf
一、判断题1.√2.√3.√4.√5.√6.×7.×8.√9.×10.×二、选择题1.C2.C3.B4.C5.D6.A7.C三、简答题1.什么是狭义的智能座舱?答:狭义的智能座舱:狭义的智能座舱范围会小一些ꎬ是基于视觉和语音等与驾乘人员交互的各种显示屏载体ꎬ包括IVIꎬ仪表和HUDꎬ生物识别等ꎬ他们与驾驶人员相关性更大的ꎮ2.智能座舱的开发流程是什么?答:开发流程为:智能座舱开发流程涉及利用新场景、场景库进行场景定义ꎻ利用HMI设计工具进行UI/UE设计(包含界面及交互逻辑设计)ꎻ利用HMI框架构建工具搭

智能网联汽车的测试评价.pdf
Technology智能网联汽车的测试评价2文/赫炎设计/邱洪涛020年10月27日,2.0版试技术实现突破。”根据测试环境可以将测试技术分为虚拟仿真测试、封闭场地测试和开《节能与新能源汽车技术放道路测试。路线图》正式发布。其目前,我国在PA级及以下智能网联汽车在整车与系统测试方面已基本形成完善的测中,测试评价技术被再次列为基础试方法,CA级及以上智能网联汽车在虚拟仿真测试、场地测试等技术方面取得了一定进支撑技术之一,并提出“低等级和展,并积极推进我国典型驾驶场景数据库建设。国家智能网联汽车创新中心已布局
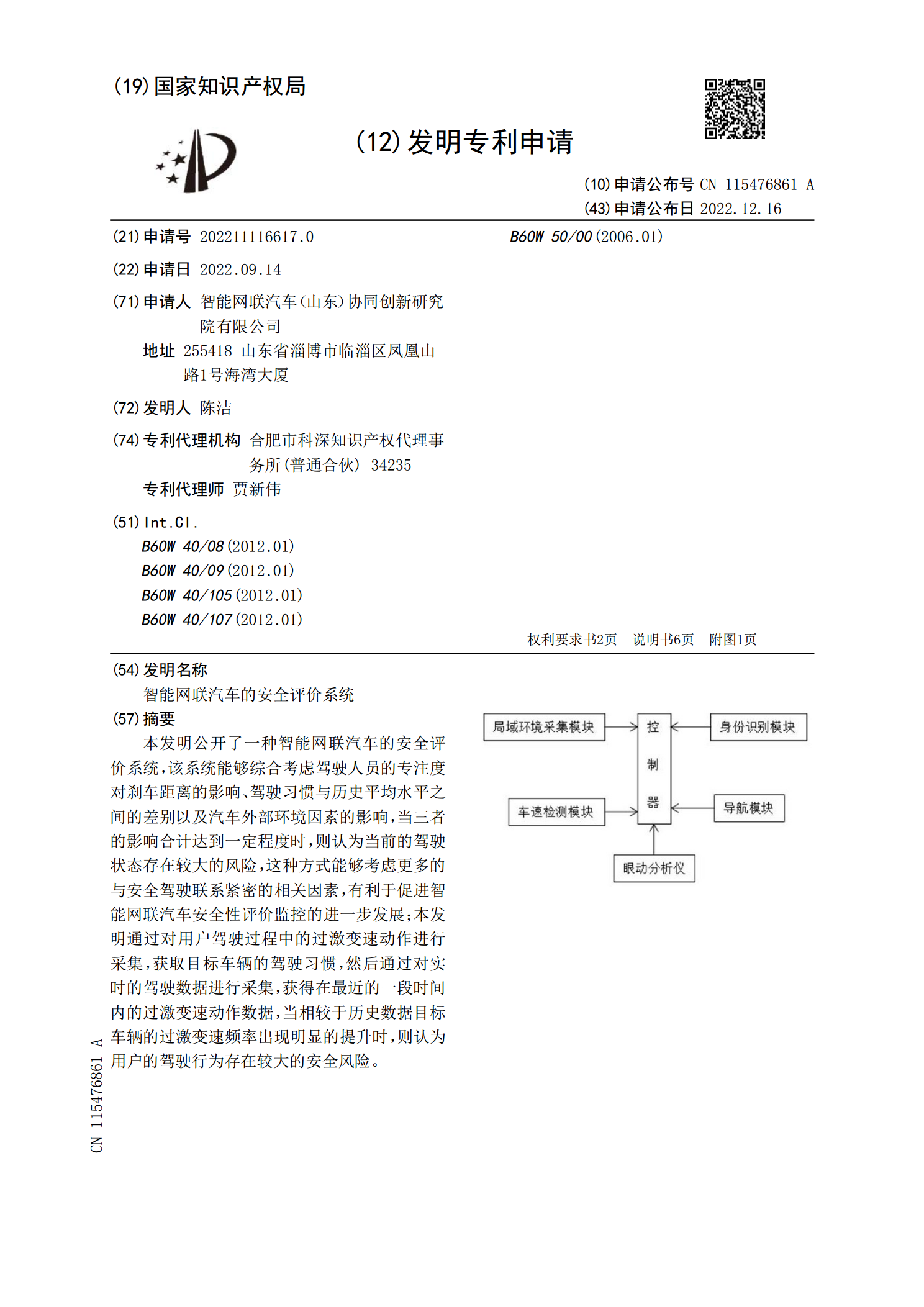
智能网联汽车的安全评价系统.pdf
本发明公开了一种智能网联汽车的安全评价系统,该系统能够综合考虑驾驶人员的专注度对刹车距离的影响、驾驶习惯与历史平均水平之间的差别以及汽车外部环境因素的影响,当三者的影响合计达到一定程度时,则认为当前的驾驶状态存在较大的风险,这种方式能够考虑更多的与安全驾驶联系紧密的相关因素,有利于促进智能网联汽车安全性评价监控的进一步发展;本发明通过对用户驾驶过程中的过激变速动作进行采集,获取目标车辆的驾驶习惯,然后通过对实时的驾驶数据进行采集,获得在最近的一段时间内的过激变速动作数据,当相较于历史数据目标车辆的过激变速