
基于无监督域自适应的目标3D姿态估计方法.pdf

是你****枝呀

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于无监督域自适应的目标3D姿态估计方法.pdf
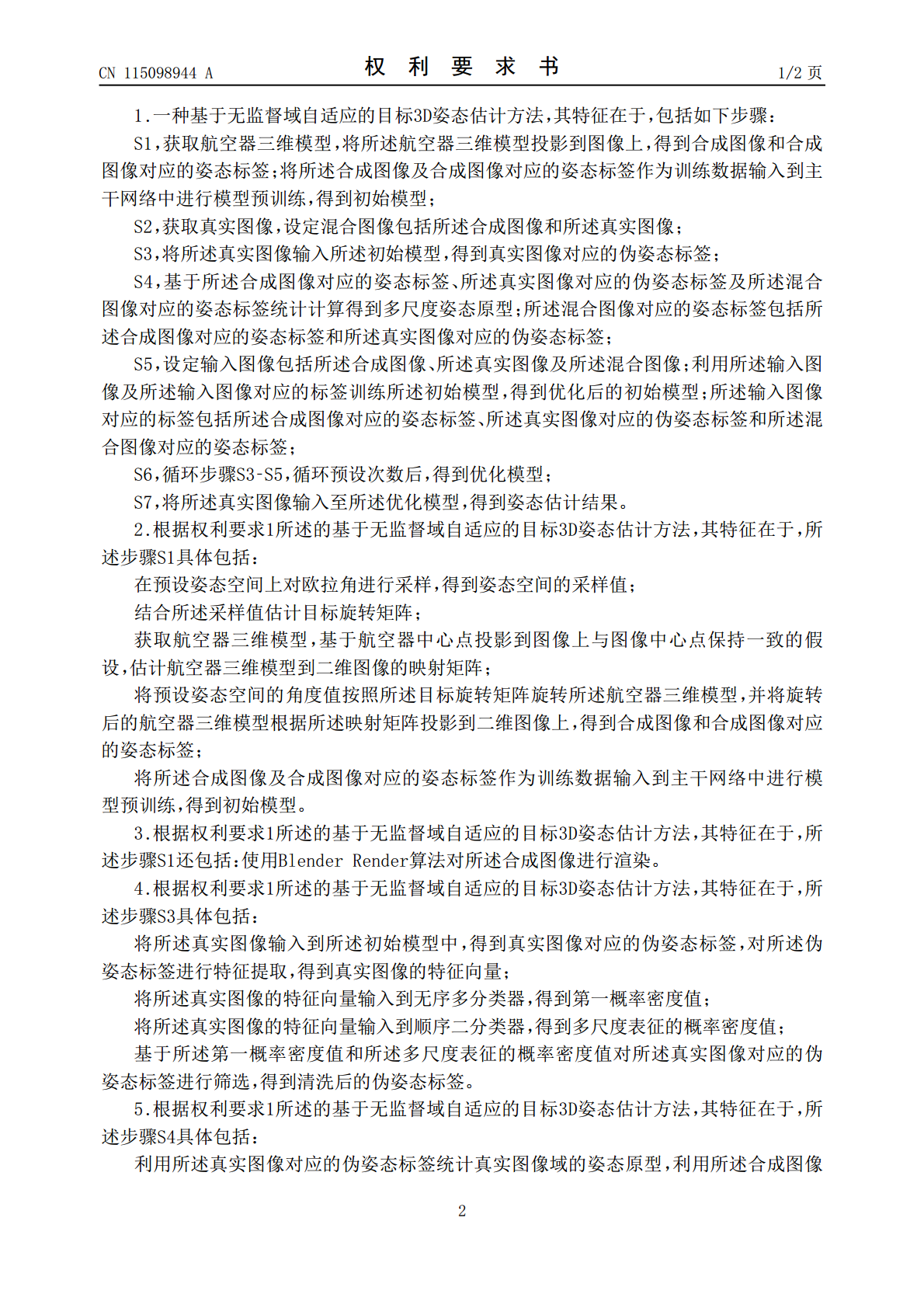
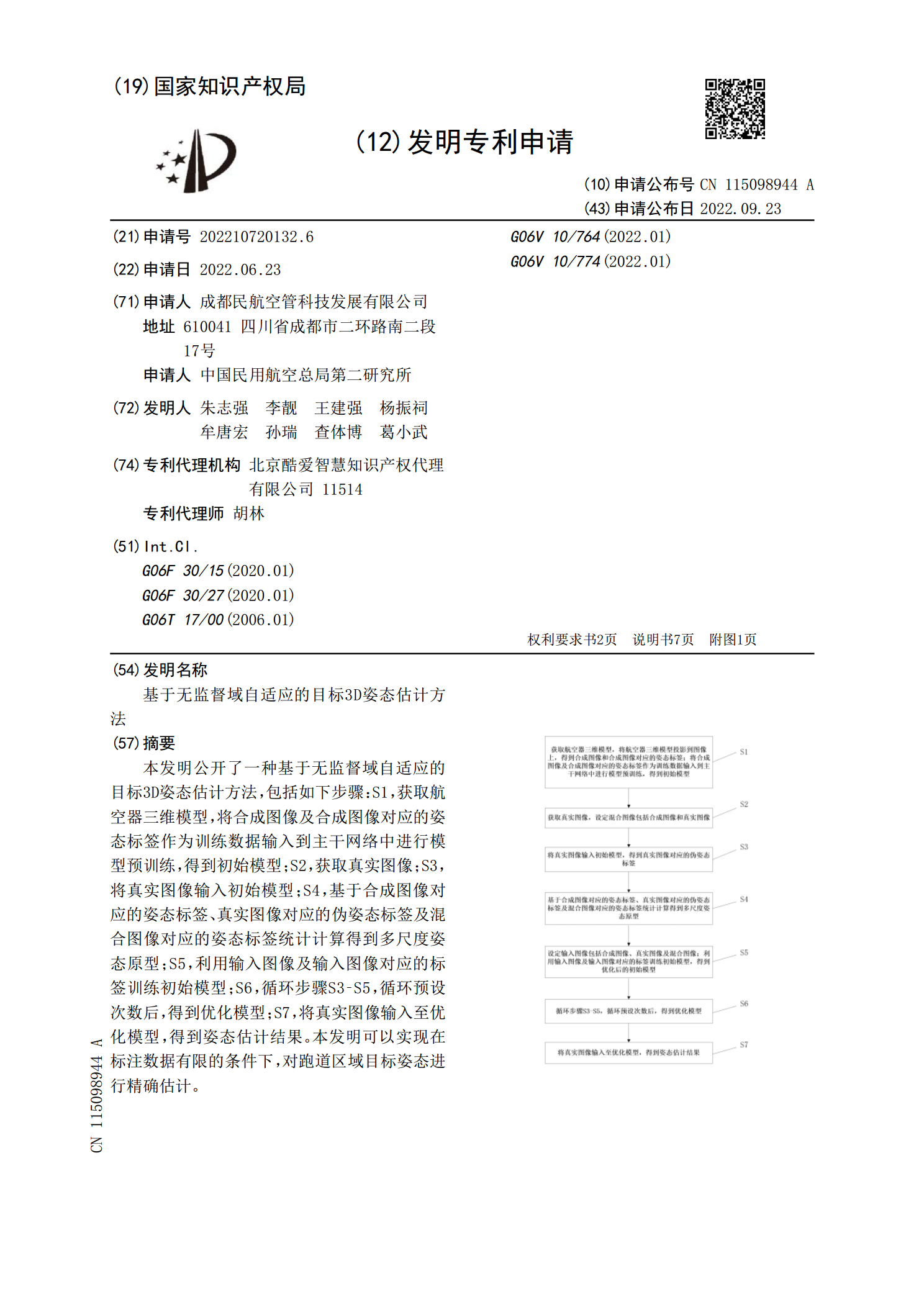
本发明公开了一种基于无监督域自适应的目标3D姿态估计方法,包括如下步骤:S1,获取航空器三维模型,将合成图像及合成图像对应的姿态标签作为训练数据输入到主干网络中进行模型预训练,得到初始模型;S2,获取真实图像;S3,将真实图像输入初始模型;S4,基于合成图像对应的姿态标签、真实图像对应的伪姿态标签及混合图像对应的姿态标签统计计算得到多尺度姿态原型;S5,利用输入图像及输入图像对应的标签训练初始模型;S6,循环步骤S3‑S5,循环预设次数后,得到优化模型;S7,将真实图像输入至优化模型,得到姿态估计结果。本
一种基于无监督自适应网络的水下双目深度估计方法.pdf
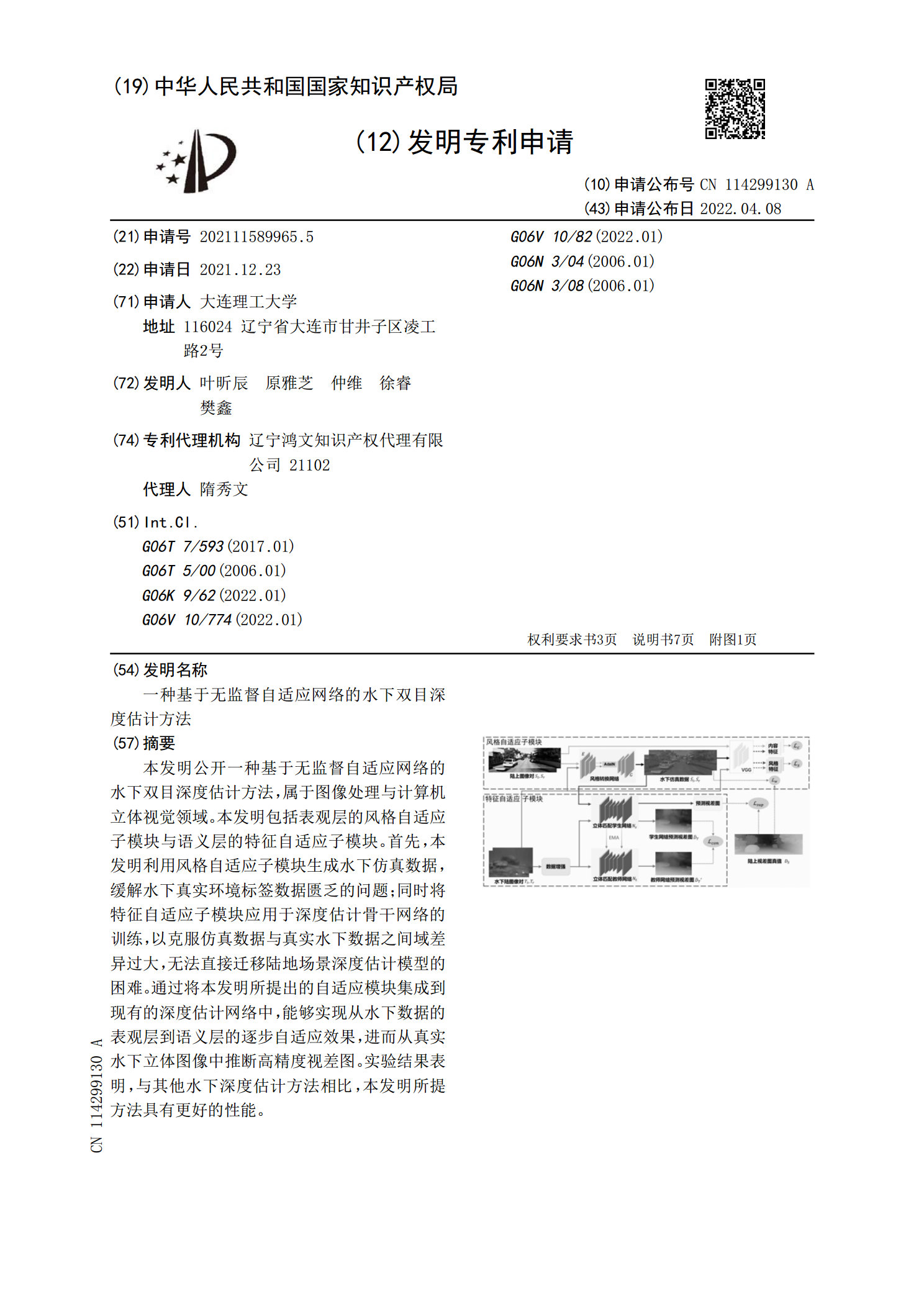
本发明公开一种基于无监督自适应网络的水下双目深度估计方法,属于图像处理与计算机立体视觉领域。本发明包括表观层的风格自适应子模块与语义层的特征自适应子模块。首先,本发明利用风格自适应子模块生成水下仿真数据,缓解水下真实环境标签数据匮乏的问题;同时将特征自适应子模块应用于深度估计骨干网络的训练,以克服仿真数据与真实水下数据之间域差异过大,无法直接迁移陆地场景深度估计模型的困难。通过将本发明所提出的自适应模块集成到现有的深度估计网络中,能够实现从水下数据的表观层到语义层的逐步自适应效果,进而从真实水下立体图像中
基于领域自适应的跨域目标检测方法.pdf
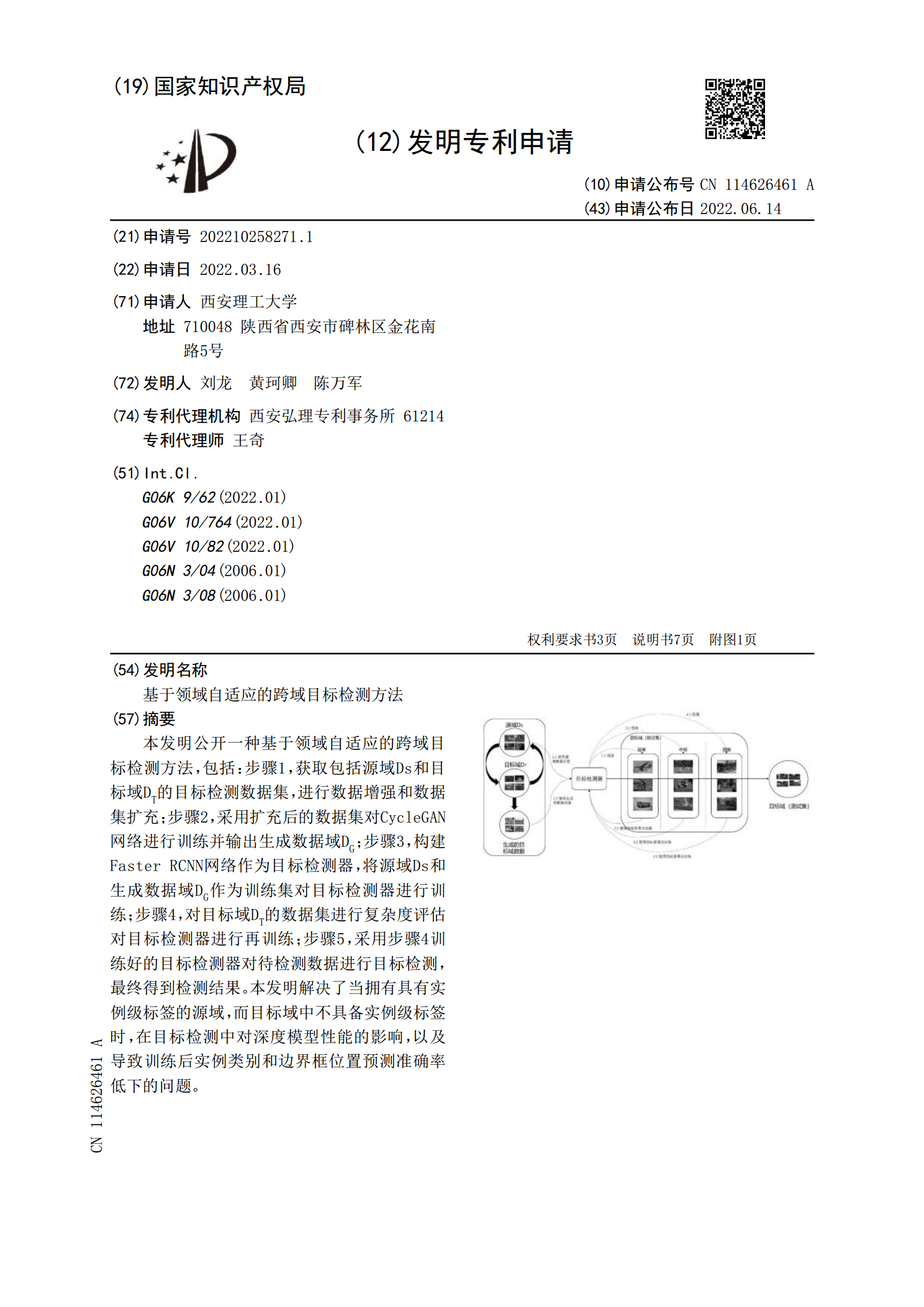
本发明公开一种基于领域自适应的跨域目标检测方法,包括:步骤1,获取包括源域Ds和目标域D<base:Sub>T</base:Sub>的目标检测数据集,进行数据增强和数据集扩充;步骤2,采用扩充后的数据集对CycleGAN网络进行训练并输出生成数据域D<base:Sub>G</base:Sub>;步骤3,构建FasterRCNN网络作为目标检测器,将源域Ds和生成数据域D<base:Sub>G</base:Sub>作为训练集对目标检测器进行训练;步骤4,对目标域D<base:Sub>T</base:Sub>
基于空间分辨率域自适应的无监督遥感图像语义分割方法.pdf
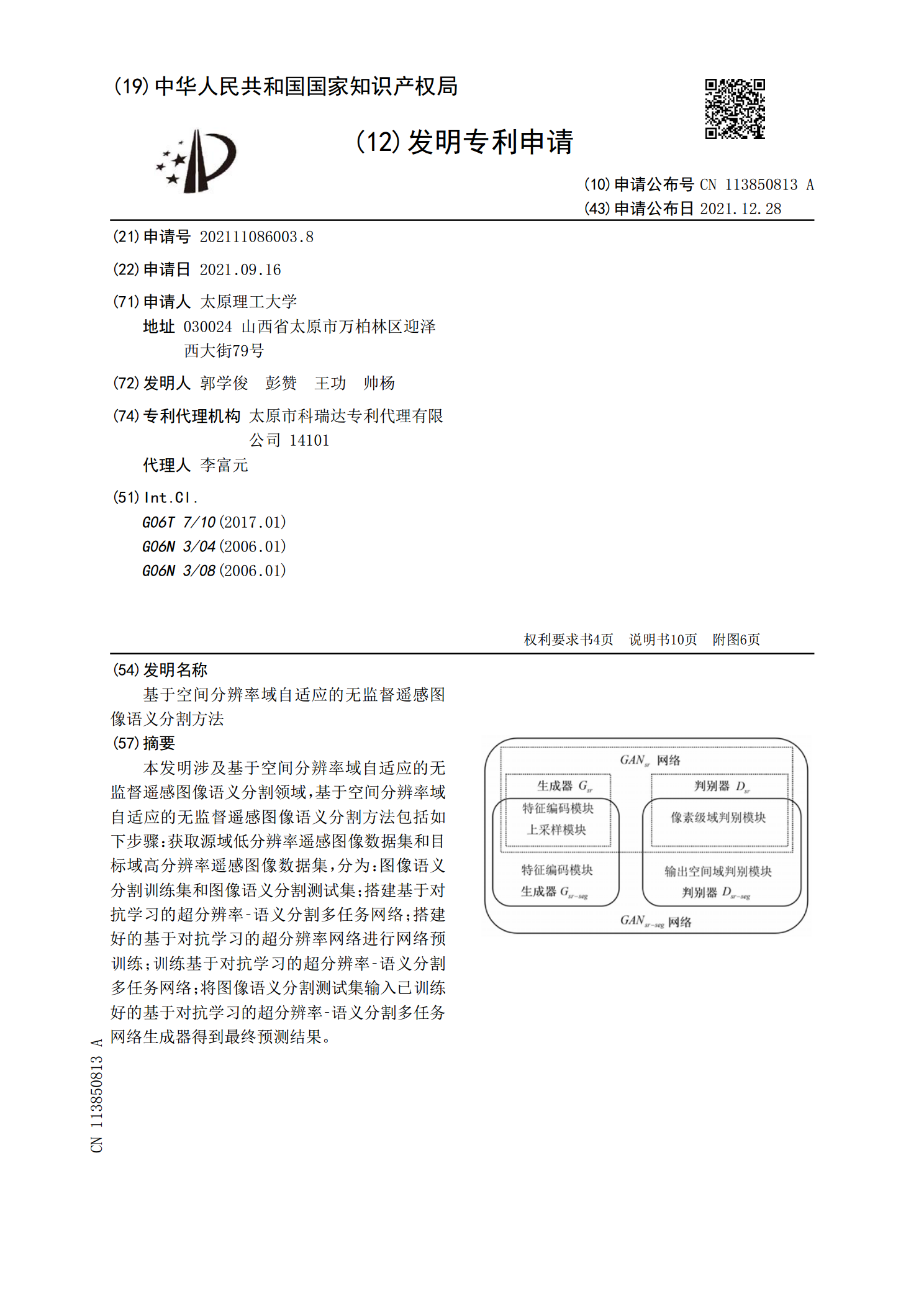
本发明涉及基于空间分辨率域自适应的无监督遥感图像语义分割领域,基于空间分辨率域自适应的无监督遥感图像语义分割方法包括如下步骤:获取源域低分辨率遥感图像数据集和目标域高分辨率遥感图像数据集,分为:图像语义分割训练集和图像语义分割测试集;搭建基于对抗学习的超分辨率‑语义分割多任务网络;搭建好的基于对抗学习的超分辨率网络进行网络预训练;训练基于对抗学习的超分辨率‑语义分割多任务网络;将图像语义分割测试集输入已训练好的基于对抗学习的超分辨率‑语义分割多任务网络生成器得到最终预测结果。
一种基于几何驱动的自监督人体3D姿态估计网络训练方法.pdf
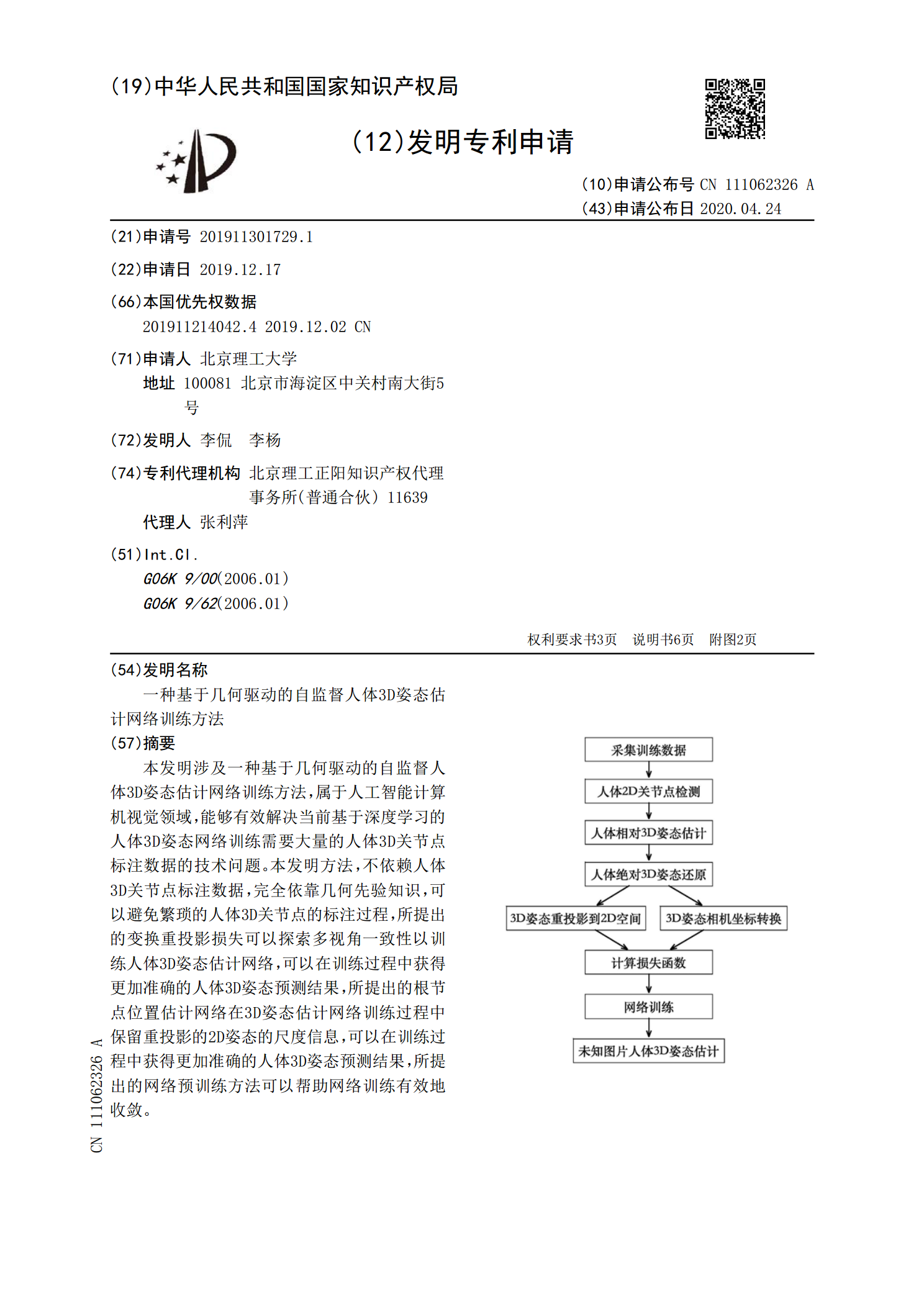
本发明涉及一种基于几何驱动的自监督人体3D姿态估计网络训练方法,属于人工智能计算机视觉领域,能够有效解决当前基于深度学习的人体3D姿态网络训练需要大量的人体3D关节点标注数据的技术问题。本发明方法,不依赖人体3D关节点标注数据,完全依靠几何先验知识,可以避免繁琐的人体3D关节点的标注过程,所提出的变换重投影损失可以探索多视角一致性以训练人体3D姿态估计网络,可以在训练过程中获得更加准确的人体3D姿态预测结果,所提出的根节点位置估计网络在3D姿态估计网络训练过程中保留重投影的2D姿态的尺度信息,可以在训练过