
一种基于几何驱动的自监督人体3D姿态估计网络训练方法.pdf

贤惠****66


1/10
2/10
3/10

4/10
5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于几何驱动的自监督人体3D姿态估计网络训练方法.pdf
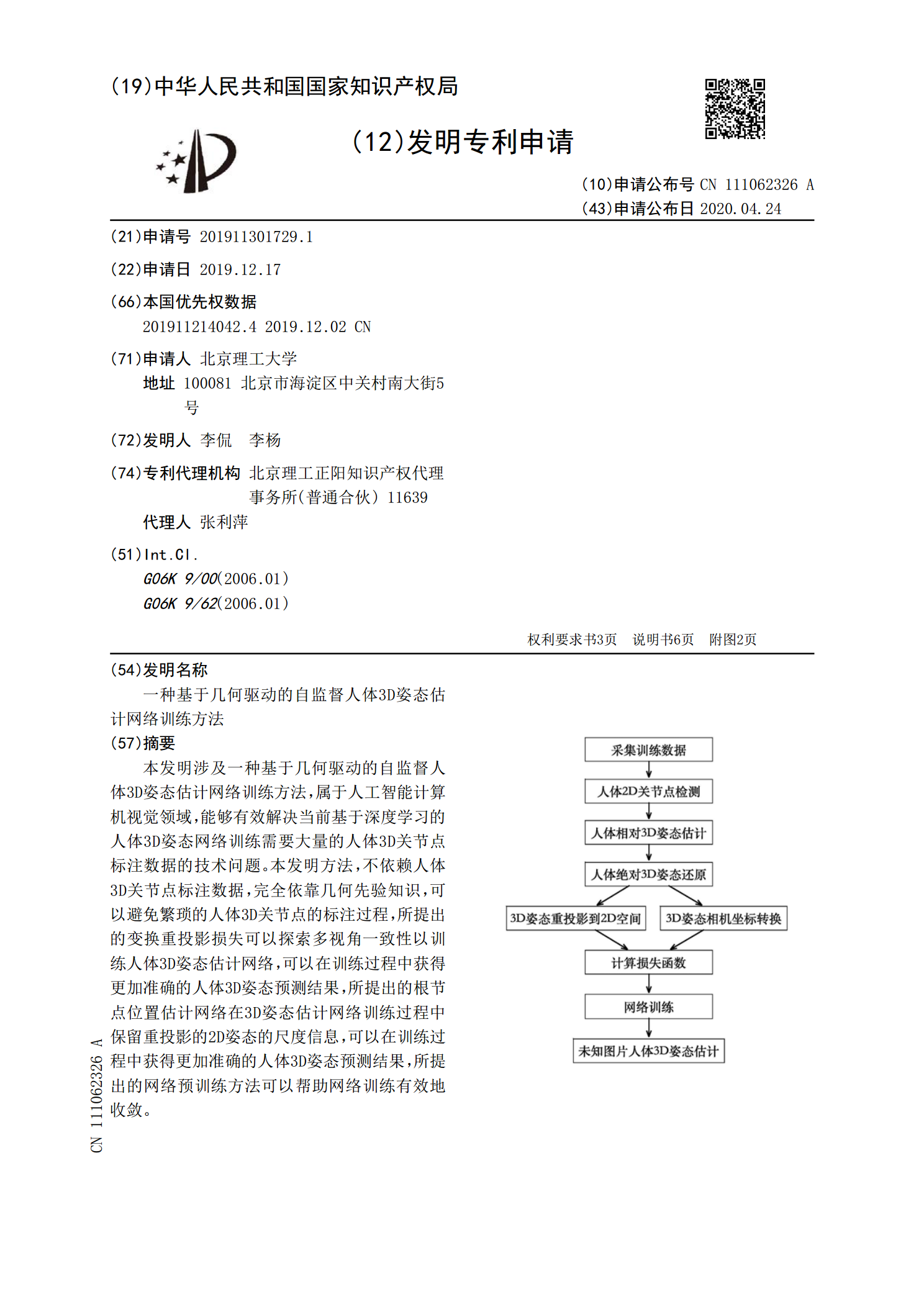
本发明涉及一种基于几何驱动的自监督人体3D姿态估计网络训练方法,属于人工智能计算机视觉领域,能够有效解决当前基于深度学习的人体3D姿态网络训练需要大量的人体3D关节点标注数据的技术问题。本发明方法,不依赖人体3D关节点标注数据,完全依靠几何先验知识,可以避免繁琐的人体3D关节点的标注过程,所提出的变换重投影损失可以探索多视角一致性以训练人体3D姿态估计网络,可以在训练过程中获得更加准确的人体3D姿态预测结果,所提出的根节点位置估计网络在3D姿态估计网络训练过程中保留重投影的2D姿态的尺度信息,可以在训练过
一种3D人体姿态估计模型训练方法.pdf
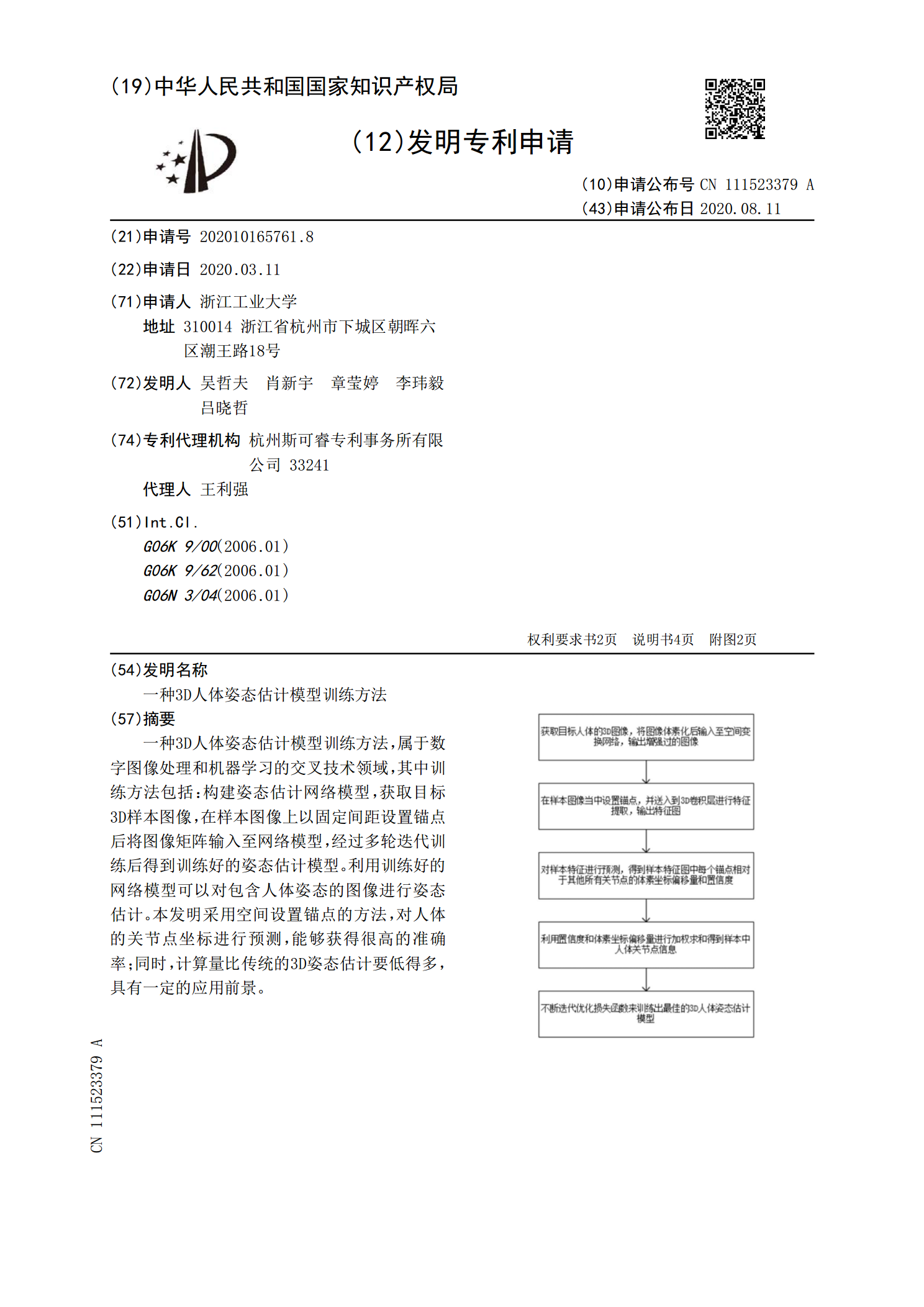
一种3D人体姿态估计模型训练方法,属于数字图像处理和机器学习的交叉技术领域,其中训练方法包括:构建姿态估计网络模型,获取目标3D样本图像,在样本图像上以固定间距设置锚点后将图像矩阵输入至网络模型,经过多轮迭代训练后得到训练好的姿态估计模型。利用训练好的网络模型可以对包含人体姿态的图像进行姿态估计。本发明采用空间设置锚点的方法,对人体的关节点坐标进行预测,能够获得很高的准确率;同时,计算量比传统的3D姿态估计要低得多,具有一定的应用前景。
一种基于人体拓扑感知网络的三维人体姿态估计方法及系统.pdf
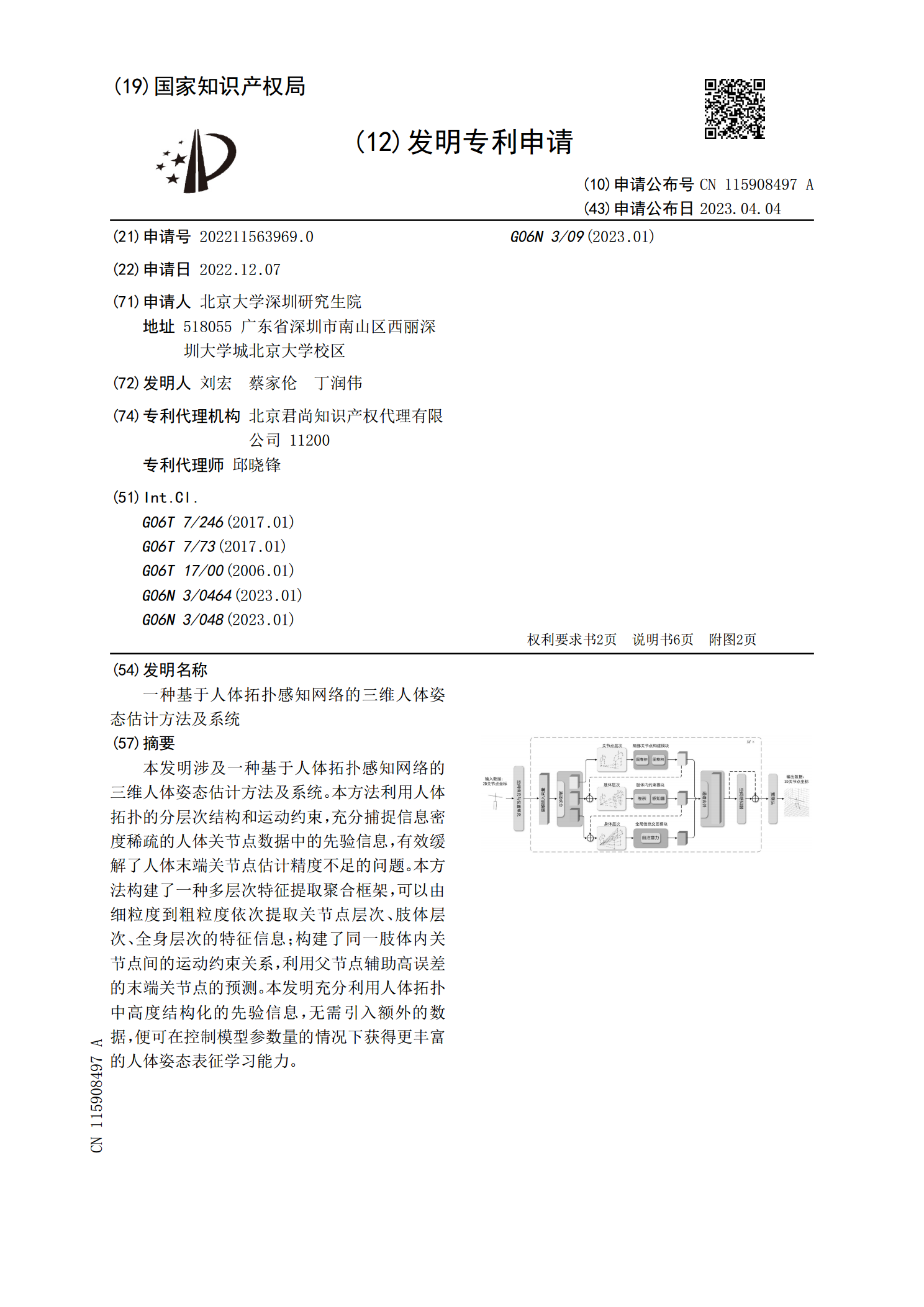
本发明涉及一种基于人体拓扑感知网络的三维人体姿态估计方法及系统。本方法利用人体拓扑的分层次结构和运动约束,充分捕捉信息密度稀疏的人体关节点数据中的先验信息,有效缓解了人体末端关节点估计精度不足的问题。本方法构建了一种多层次特征提取聚合框架,可以由细粒度到粗粒度依次提取关节点层次、肢体层次、全身层次的特征信息;构建了同一肢体内关节点间的运动约束关系,利用父节点辅助高误差的末端关节点的预测。本发明充分利用人体拓扑中高度结构化的先验信息,无需引入额外的数据,便可在控制模型参数量的情况下获得更丰富的人体姿态表征学
基于无监督域自适应的目标3D姿态估计方法.pdf
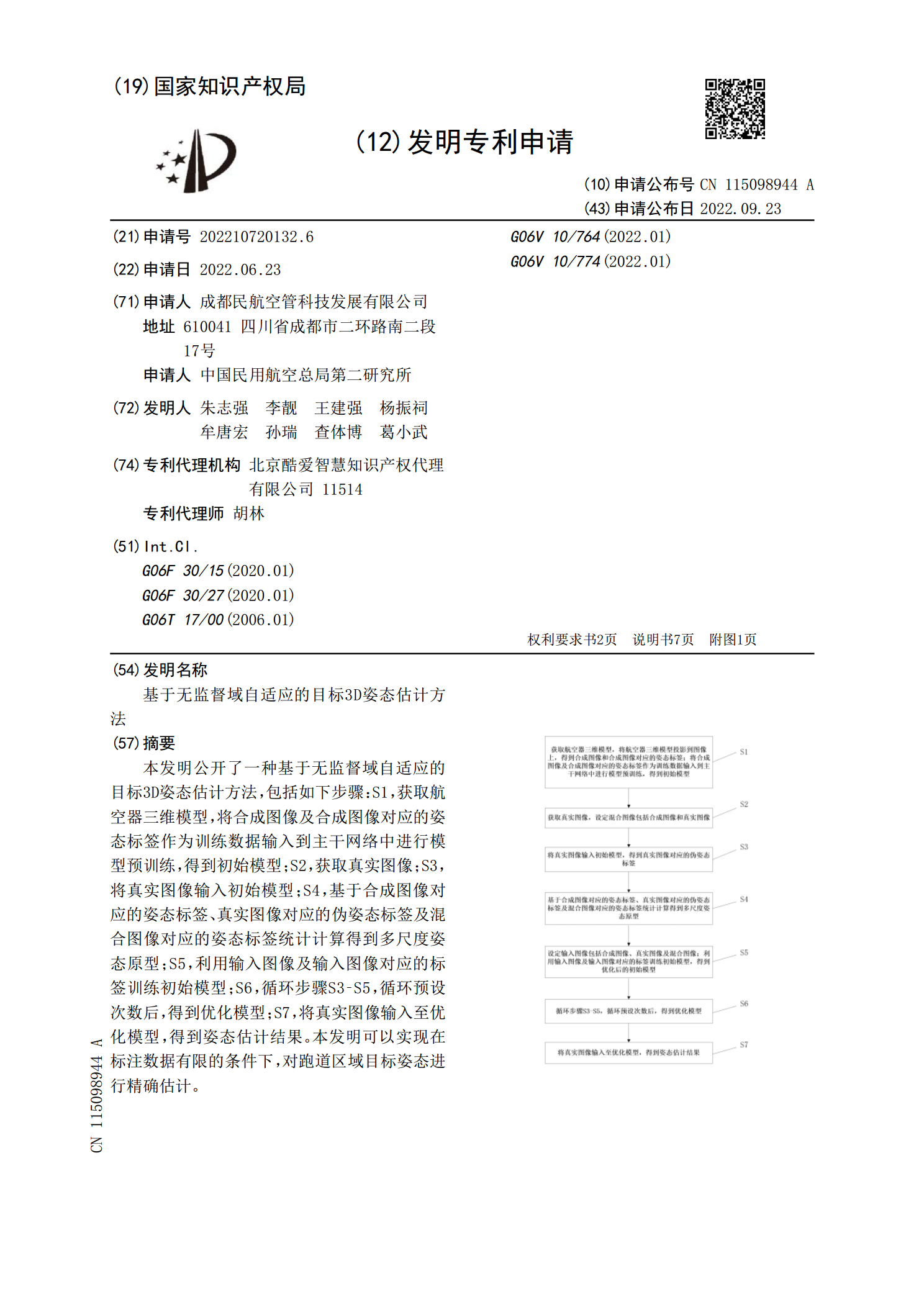
本发明公开了一种基于无监督域自适应的目标3D姿态估计方法,包括如下步骤:S1,获取航空器三维模型,将合成图像及合成图像对应的姿态标签作为训练数据输入到主干网络中进行模型预训练,得到初始模型;S2,获取真实图像;S3,将真实图像输入初始模型;S4,基于合成图像对应的姿态标签、真实图像对应的伪姿态标签及混合图像对应的姿态标签统计计算得到多尺度姿态原型;S5,利用输入图像及输入图像对应的标签训练初始模型;S6,循环步骤S3‑S5,循环预设次数后,得到优化模型;S7,将真实图像输入至优化模型,得到姿态估计结果。本

一种基于二值化神经网络的人体姿态估计方法.pdf
本发明公开了一种基于二值化神经网络的人体姿态估计方法,属于计算机视觉和深度学习的模型压缩领域,首先,收集若干包括人姿态的图片,标记图片中每个人的关键点,逐张输入二维的高斯函数产生概率分布图,作为真实标签;然后,搭建二值化神经网络,逐张输入真实标签,使用改进的二值化的特征提取网络ReActNet进行特征提取;并利用二值化的上采样网络进行上采样,分别输出每个人体关键点的预测热力图;利用各预测热力图与真实标签进行拟合,训练二值化神经网络;最后,基于泰勒展开的坐标预测算法对热力图中每个关键点计算近似估计坐标,映射