
基于TDM MIMO雷达的速度解模糊方法及系统.pdf

努力****幻翠


1/10
2/10
3/10

4/10
5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于TDM MIMO雷达的速度解模糊方法及系统.pdf
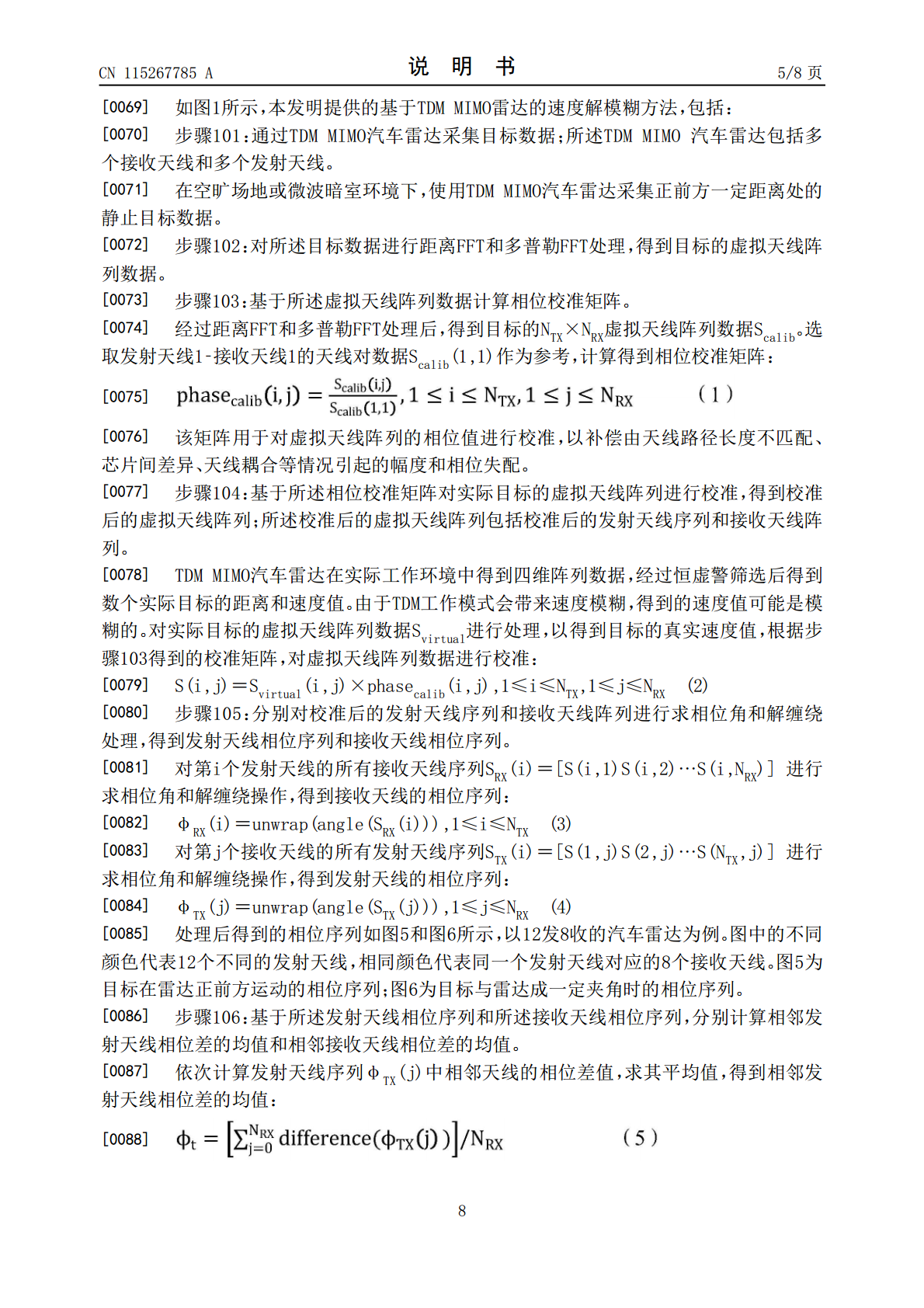
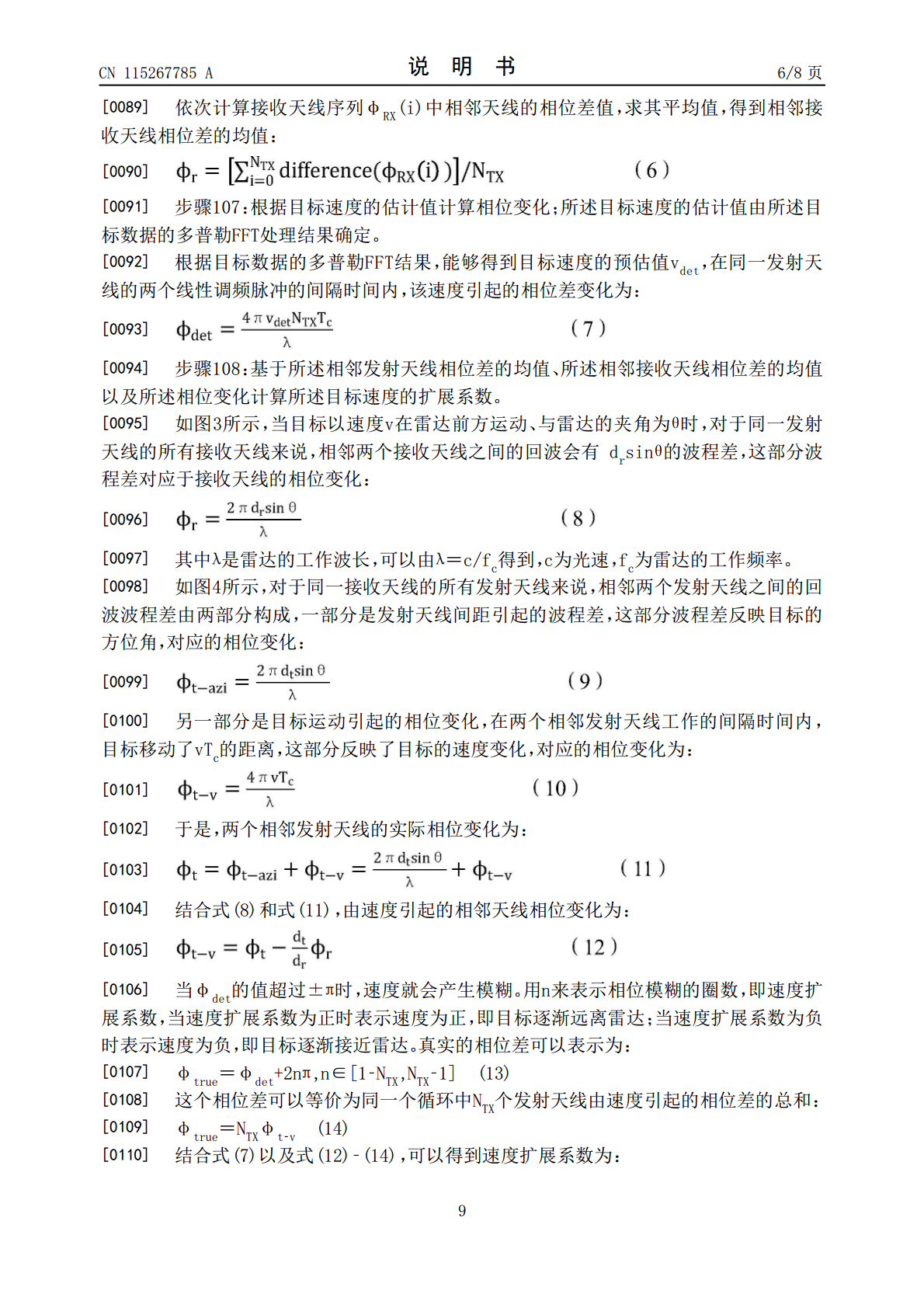
本发明公开了一种基于TDMMIMO雷达的速度解模糊方法及系统。该方法包括:基于虚拟天线阵列数据计算相位校准矩阵;基于相位校准矩阵对实际目标的虚拟天线阵列进行校准;分别对校准后的发射天线序列和接收天线阵列进行求相位角和解缠绕处理;基于发射天线相位序列和接收天线相位序列,分别计算相邻发射天线相位差的均值和相邻接收天线相位差的均值;根据目标速度的估计值计算相位变化;基于相邻发射天线相位差的均值、相邻接收天线相位差的均值以及相位变化计算目标速度的扩展系数;基于扩展系数对目标速度进行解模糊,得到目标实际速度。本发明

一种基于MIMO汽车雷达的速度解模糊方法.pdf
本发明提出了一种基于MIMO汽车雷达的速度解模糊方法,通过采用多通道多普勒相位补偿,并对补偿后的多个通道进行FFT处理,根据一定数学准则选择最优通道的方法,解决了TDMMIMO的速度模糊问题,提高了测速范围,保证了角度测量的准确度,极大扩展了该技术在汽车雷达方向的实用价值。

TDM-MIMO雷达的解模糊错误纠正方法、装置及终端.pdf
本发明提供一种TDM‑MIMO雷达的解模糊错误纠正方法、装置及终端。该方法包括:对TDM‑MIMO雷达探测到的点云数据进行聚类,得到初始点云簇以及每个初始点云簇所属的待确认目标的运动信息;基于各待确认目标的运动信息,识别属于同一真实目标的初始点云簇,得到目标点云簇,其中,每个目标点云簇对应于一个真实目标;对于每个目标点云簇,将该目标点云簇中所包含的初始点云簇所属的待确认目标的运动信息分别作为该目标点云簇所属真实目标的主信息和从信息,并将主信息和/或从信息作为量测值进行目标关联,以得到该目标点云簇所属的真实

车载MIMO雷达求熵解速度模糊的方法.pdf
本发明公开了一种车载MIMO雷达求熵解速度模糊的方法,包括对测得的回波数据进行ADC处理,并根据通道顺序重新排列;对每个通道的回波信号进行距离‑多普勒维的FFT变换;根据求得的模糊速度,构造2L组不同的速度,得到2L组新的加权矢量及输出功率;通过求熵的方式可以同时解同一距离‑多普勒门内所有信号的速度模糊,从而能够准确估算出所有地面杂波信号相对于雷达准确的角度信息,最终根据地面杂波在方位向关于雷达前进方向的对称性,求解车辆自身的不模糊速度。

基于汽车雷达的环境目标速度解模糊方法、系统及介质.pdf
本发明公开了一种基于汽车雷达的环境目标速度解模糊方法、系统及存储介质,属于雷达测速技术领域,用于解决目前解模糊运算量大、精度低的技术问题,采用的具体技术方案为:基于汽车雷达发射两组不同脉冲重复周期的脉冲多普勒信号,获得两组不同的二维FFT数据;统计两组二维FFT数据中不同多普勒维度的目标数量,获得目标数量最多的多普勒维位置,即为环境目标的多普勒维位置;采取假设验证法求解环境目标的真实速度。本发明的方法、系统及存储介质均具有运算量小、精度高、操作简便等优点。