
一种基于动态长基线的多目相机船舶高度测量方法.pdf

一只****爱敏

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于动态长基线的多目相机船舶高度测量方法.pdf
本发明公开了一种基于动态长基线的多目相机船舶高度测量方法,包括:S1:将河道划分为三个等宽度区域;S2:将三台并排的相机中不同基线值下的两台相机组成双目拍摄系统,在三个等宽度区域内进行拍摄,获得三组不同的左视图图像和右视图图像;S3:获取每个河道下双目拍摄系统的预标定参数阈值范围;S4:将测量的距离与预标定参数阈值范围进行比较,从而动态调整拍摄系统的组合情况;S5:在多目相机系统中动态调整不同基线距离下与该距离值相符合的两台相机组合成的拍摄系统,对航行船舶进行拍摄获得图像数据;S6:将双目拍摄系统得到的图
一种基于多目立体视觉的分布式船舶高度检测系统.pdf
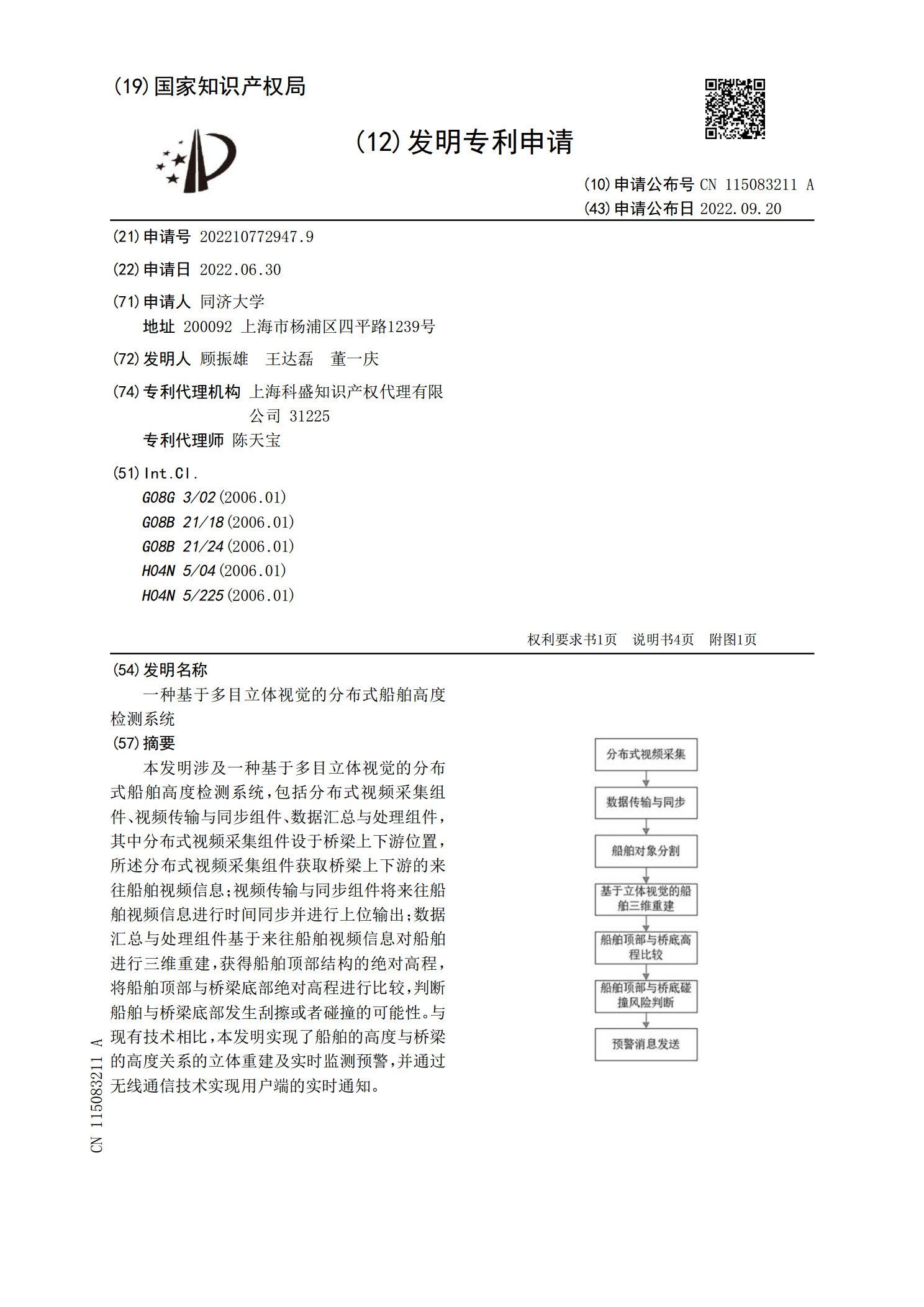
本发明涉及一种基于多目立体视觉的分布式船舶高度检测系统,包括分布式视频采集组件、视频传输与同步组件、数据汇总与处理组件,其中分布式视频采集组件设于桥梁上下游位置,所述分布式视频采集组件获取桥梁上下游的来往船舶视频信息;视频传输与同步组件将来往船舶视频信息进行时间同步并进行上位输出;数据汇总与处理组件基于来往船舶视频信息对船舶进行三维重建,获得船舶顶部结构的绝对高程,将船舶顶部与桥梁底部绝对高程进行比较,判断船舶与桥梁底部发生刮擦或者碰撞的可能性。与现有技术相比,本发明实现了船舶的高度与桥梁的高度关系的立体

基于红外成像的船舶净空高度测量方法.docx
基于红外成像的船舶净空高度测量方法引言船舶作为海上交通运输的重要工具,其安全问题一直备受关注。船舶碰撞事故多数是由于净空高度不足或者打盹、疏忽等原因导致。因此,净空高度的测量是航行安全的关键之一。目前,船舶的净空高度测量主要采用地面测量和激光雷达测量等方式,但这些方法存在局限性,不能满足实际需求。随着近年来红外成像技术的快速发展,其在航空、建筑等领域得到了广泛应用。针对船舶净空高度测量问题,本文提出一种基于红外成像的测量方法,旨在提高船舶净空高度的精度和可靠性。红外成像技术的基本原理红外成像技术适用于从波
一种基于倾斜预警式宽范围双目相机船舶高度测量系统.pdf
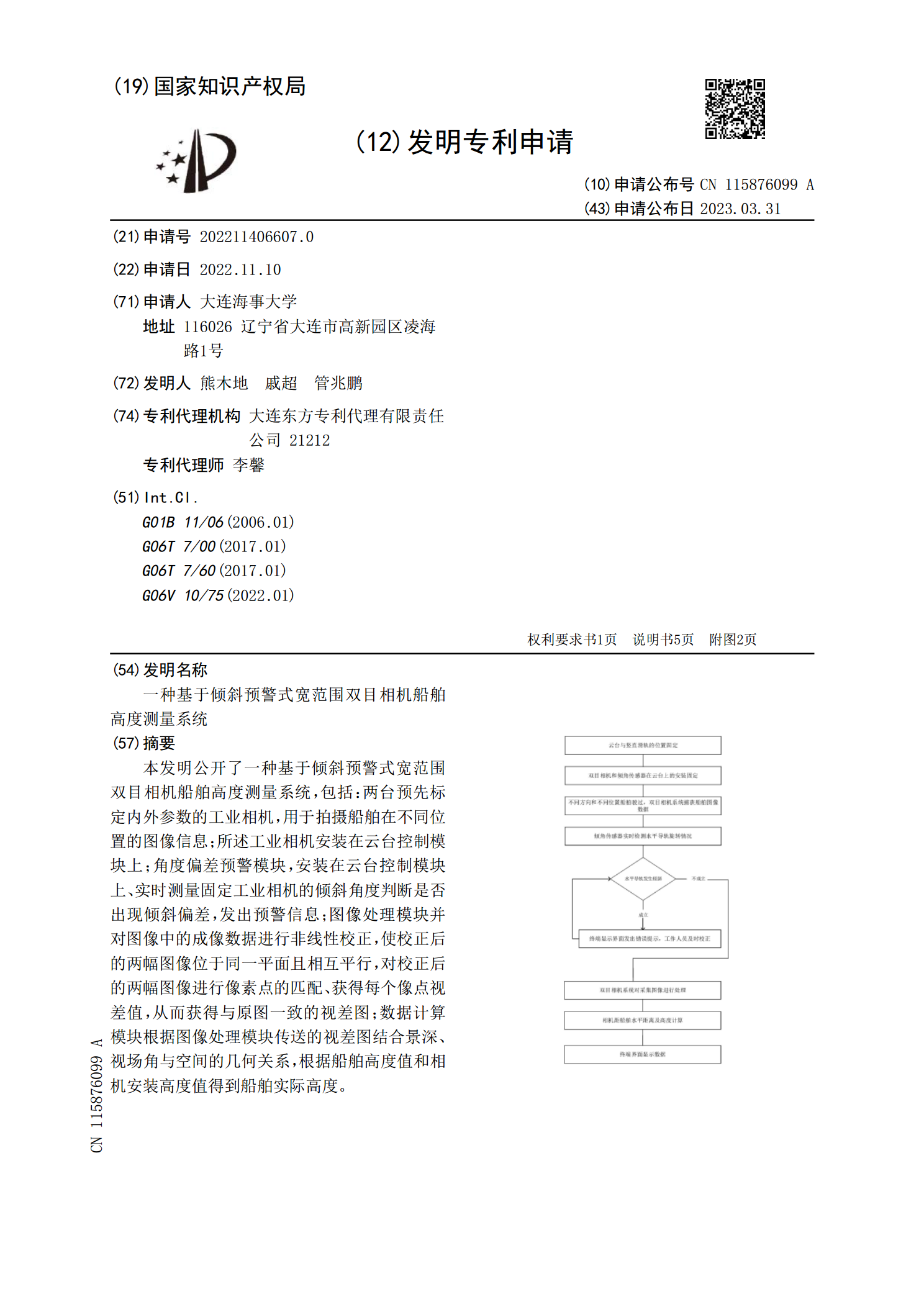
本发明公开了一种基于倾斜预警式宽范围双目相机船舶高度测量系统,包括:两台预先标定内外参数的工业相机,用于拍摄船舶在不同位置的图像信息;所述工业相机安装在云台控制模块上;角度偏差预警模块,安装在云台控制模块上、实时测量固定工业相机的倾斜角度判断是否出现倾斜偏差,发出预警信息;图像处理模块并对图像中的成像数据进行非线性校正,使校正后的两幅图像位于同一平面且相互平行,对校正后的两幅图像进行像素点的匹配、获得每个像点视差值,从而获得与原图一致的视差图;数据计算模块根据图像处理模块传送的视差图结合景深、视场角与空间

一种机载双天线InSAR基线动态测量方法.docx
一种机载双天线InSAR基线动态测量方法机载双天线InSAR技术是一种通过双天线接收雷达波来获取地表高度信息的技术,在地质灾害监测、城市建设规划和环境监测等领域有着广泛的应用。在该技术中,基线的测量是非常重要的一个环节,对于保证数据的准确性和及时性具有至关重要的意义。因此,本文将介绍一种机载双天线InSAR基线动态测量的方法。传统的InSAR技术中,基线的测量通常通过GNSS测量进行。而在机载双天线InSAR技术中,常常由于机体的摇晃和飞行姿态的不稳定,导致GNSS信号的质量不稳定,从而对基线测量造成影响