
双手自动取料装置及自动取料方法和串焊机.pdf

文库****坚白


1/10
2/10
3/10

4/10

5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
双手自动取料装置及自动取料方法和串焊机.pdf
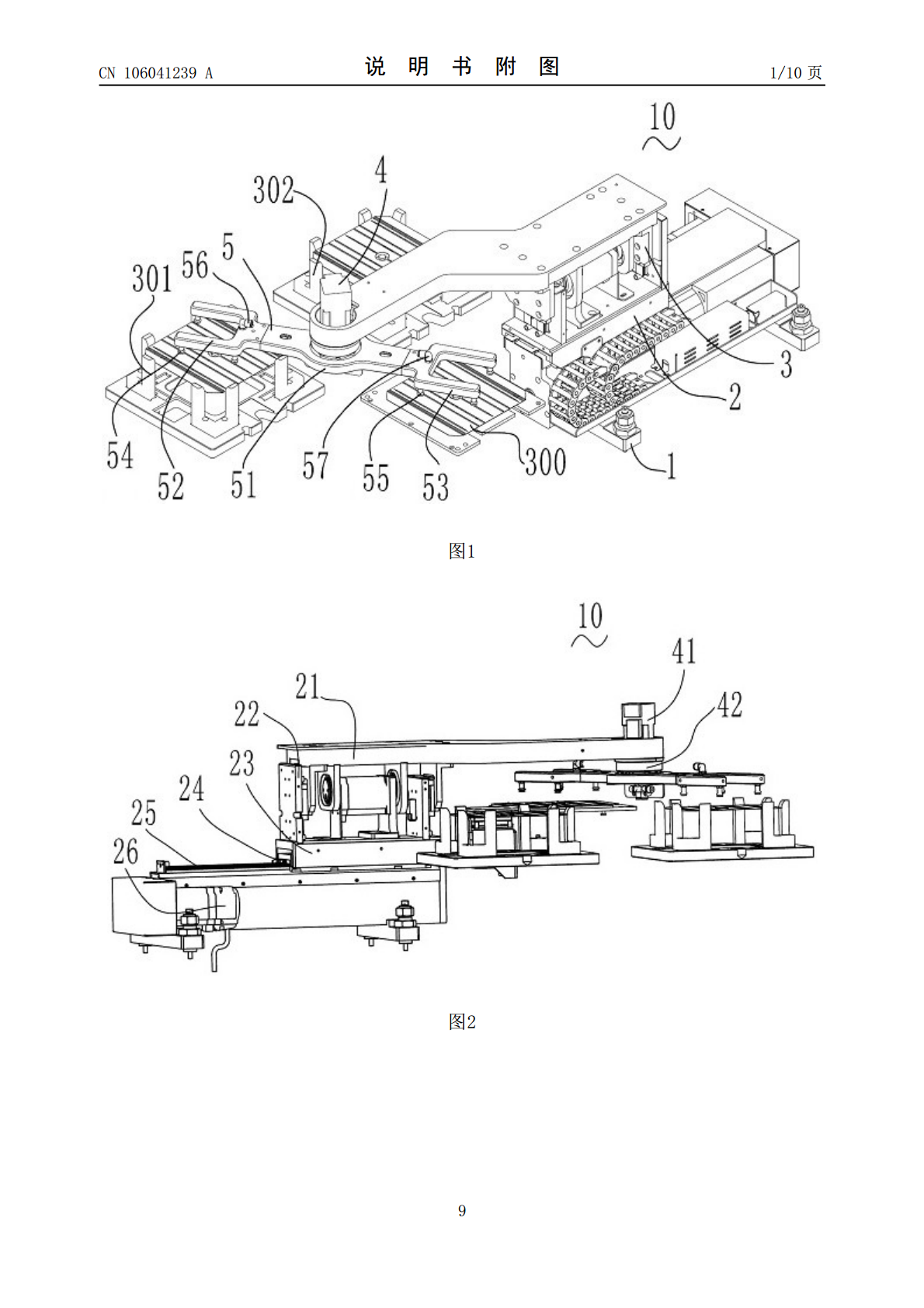
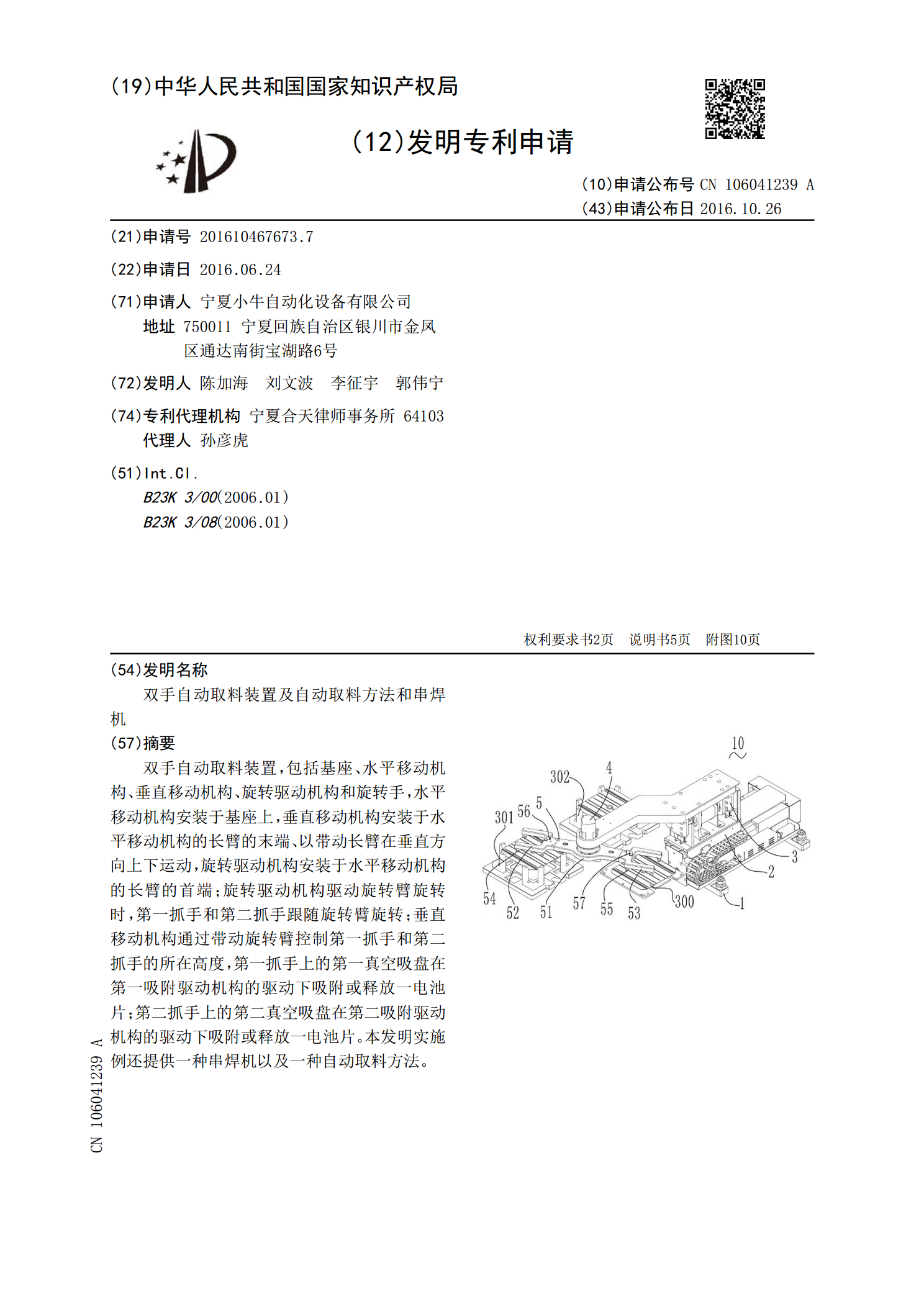
双手自动取料装置,包括基座、水平移动机构、垂直移动机构、旋转驱动机构和旋转手,水平移动机构安装于基座上,垂直移动机构安装于水平移动机构的长臂的末端、以带动长臂在垂直方向上下运动,旋转驱动机构安装于水平移动机构的长臂的首端;旋转驱动机构驱动旋转臂旋转时,第一抓手和第二抓手跟随旋转臂旋转;垂直移动机构通过带动旋转臂控制第一抓手和第二抓手的所在高度,第一抓手上的第一真空吸盘在第一吸附驱动机构的驱动下吸附或释放一电池片;第二抓手上的第二真空吸盘在第二吸附驱动机构的驱动下吸附或释放一电池片。本发明实施例还提供一种串

一种堆取料机的自动取料控制装置及方法.pdf
本发明揭示了一种堆取料机的自动取料控制装置及方法,由于本发明具有斗轮电机电流的采集功能,并建立了斗轮电机电流与斗轮取料量的关系模型以及斗轮取料量与悬臂回转电机频率的关系模型,这样在这些关系模型的作用下,自动取料时的悬臂回转速度(由悬臂回转电机频率决定),可由取料时的斗轮电机电流来控制,而斗轮电机电流又可准确、迅速地反映斗轮取料量,所以可有效形成一个闭环控制过程,可以很好的控制斗轮取料量。另外由于具有料堆边界判断功能,当每次取料到达料堆边界后,能够自动进行判断,并调整堆取料机位置,进入下次回转取料,如此反复

用于斗轮取料机的自动取料流量控制方法及装置.pdf
本发明涉及取料控制领域,公开了一种用于斗轮取料机的自动取料流量控制方法,该方法包括:估算斗轮取料机的取料流量反馈值;检测斗轮当前是否处于旋转状态;以及当斗轮当前处于旋转状态时,根据设定取料流量值和取料流量反馈值对斗轮取料机臂架的回转速度进行调整。根据本发明的另一方面,还提供一种用于斗轮取料机的自动取料流量控制装置,利用该方法和装置能够实现取料流量的精确控制,并能提高作业效率。

自动变距取料装置.pdf
本实用新型揭示了一种自动变距取料装置,包括机架,机架上设有至少一个用以容置医用塑料管的承载板,承载板的上方设有与外界驱动源固接的轴座,轴座上固设有一主板,主板的一侧设有一副板,副板可由设置在所述主板上的驱动组件驱动其面向或背向所述主板移动;主板和副板的底部均设有吸附板,吸附板可由推送组件驱动其上下移动,吸附板上设有一组与设置在所述承载板上的所述医用塑料管的数量和位置相适配的吸附头。本实用新型的有益效果主要体现在:该装置布局合理,设计巧妙,不仅能自动抓取多个承载板,还能同时调节承载板之间的间隙,从而适应需变

堆取料机全自动堆取料.docx
全自动散货堆场堆取方法来源:广搜网本站原创公益为中国网民提供数字化信息发布日期:2013-6-129:22:07发明人:王智(摘要:本发明涉及一种应用于大型得港口码头、货车车站、露天仓库得全自动散货堆场堆取方法。该方法主要就是指在堆取料机作业时,在充分保证料场利用率、发挥堆取料机得堆取料能力与其它功能基础上,堆取料机司机室内无操作司机进行操作与监视,现场工控机内也不需要人员进行全程得控制操作。现场工控机从管理系统获得作业任务后,根据料场情况与堆取料机状态进行优化计算与安全性检验,自动产生相关堆或取模式信息