
基于分数阶PID与分数阶终端滑模的四旋翼无人机控制方法.pdf

秀华****魔王

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于分数阶PID与分数阶终端滑模的四旋翼无人机控制方法.pdf
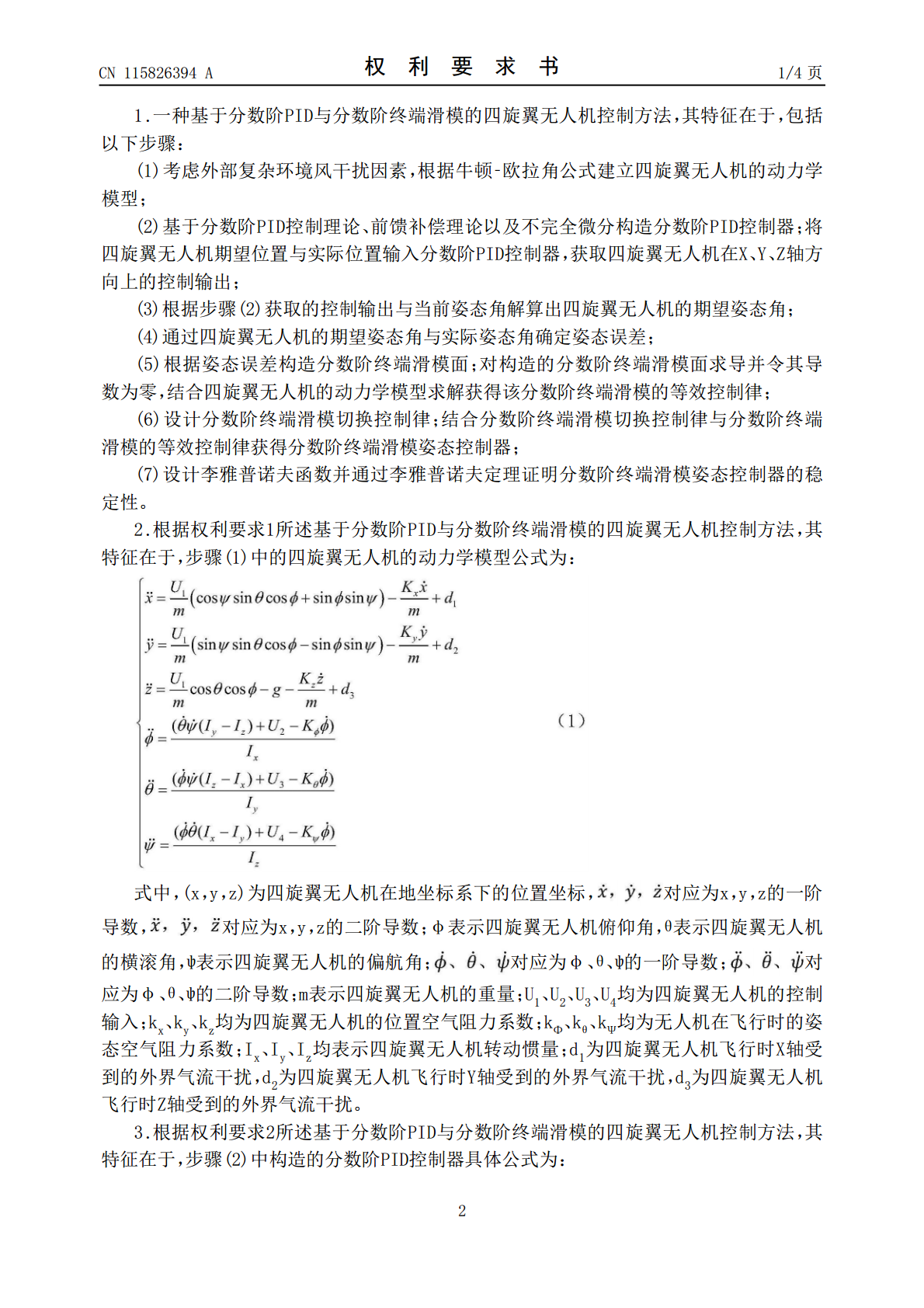
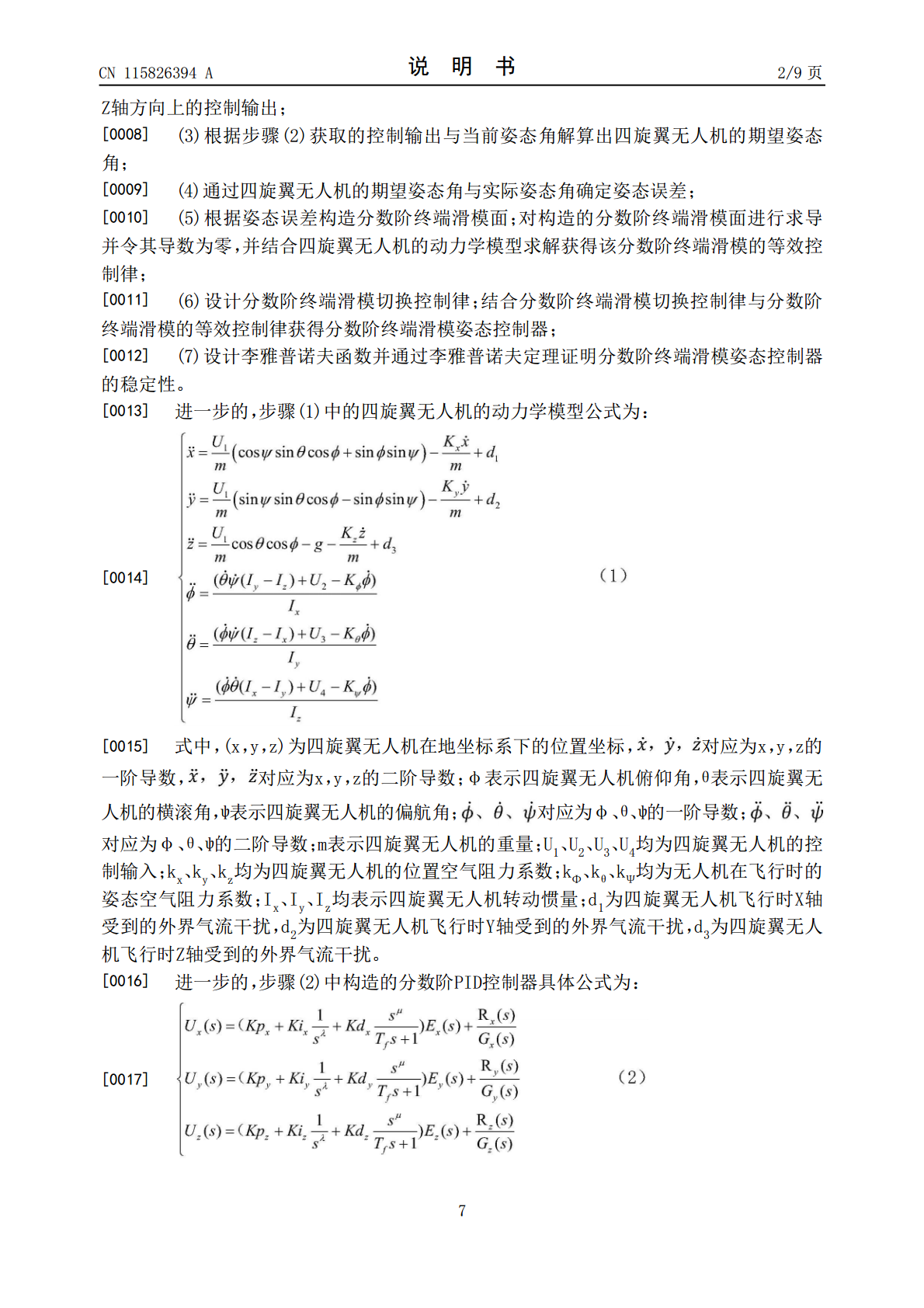
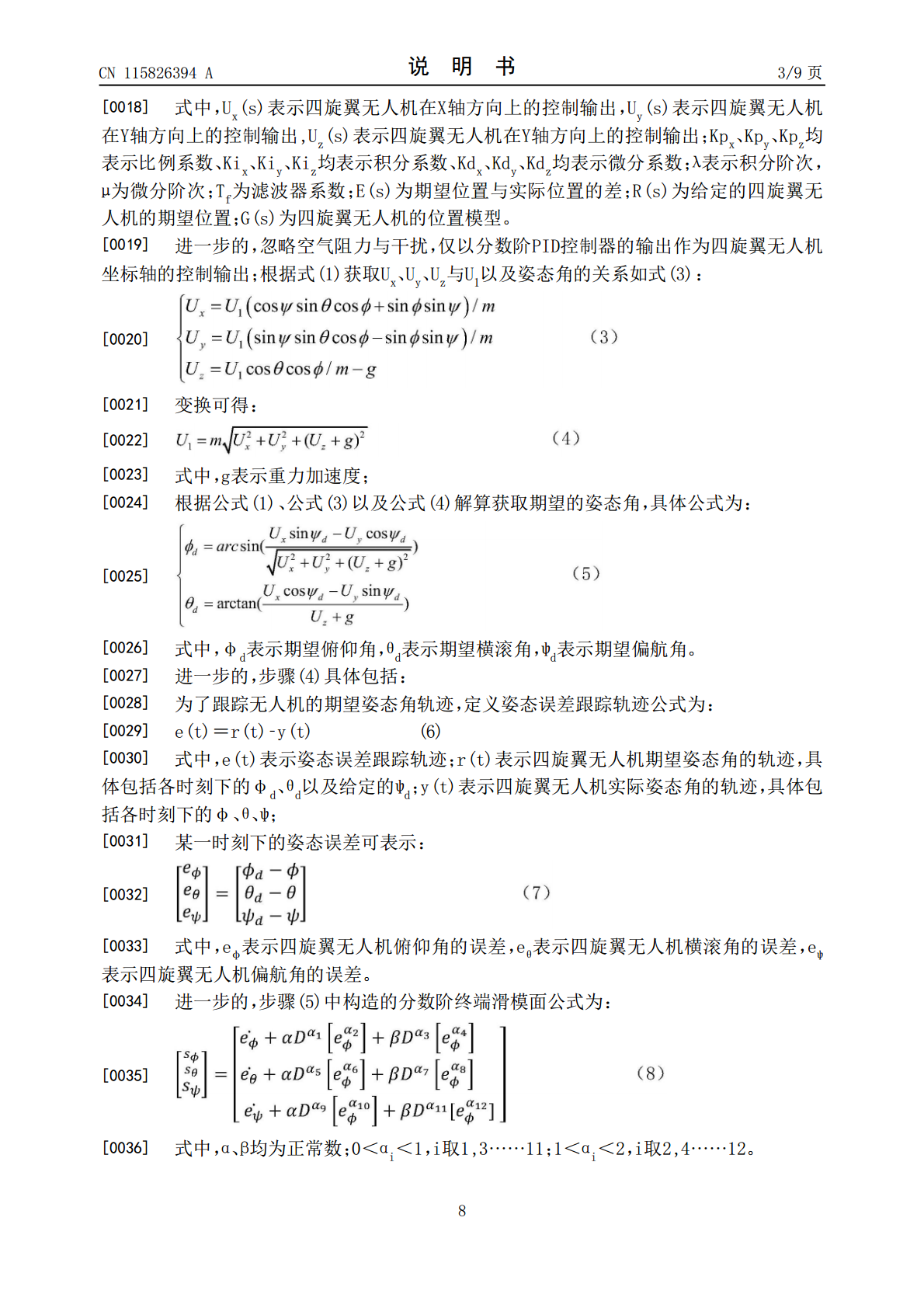
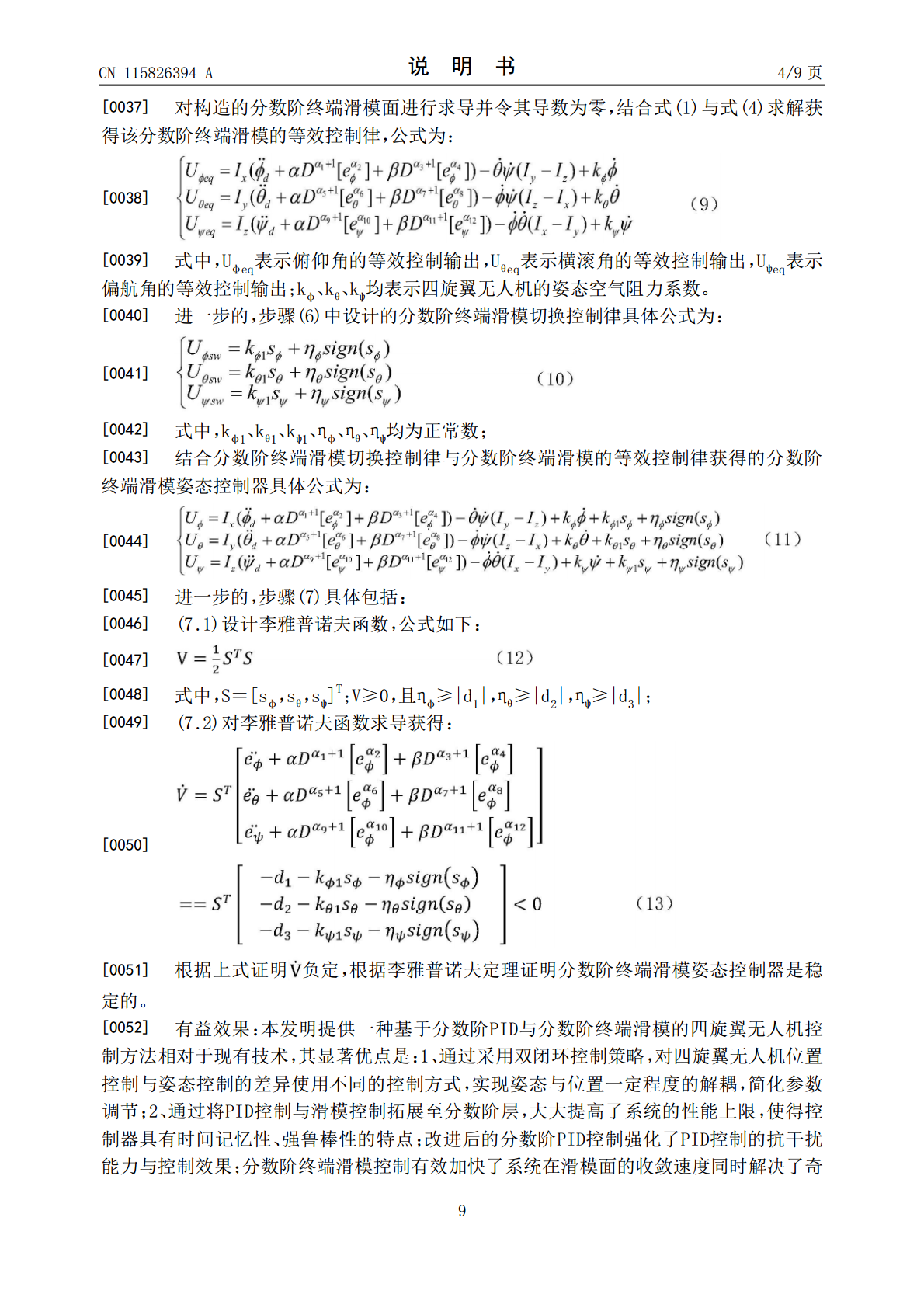
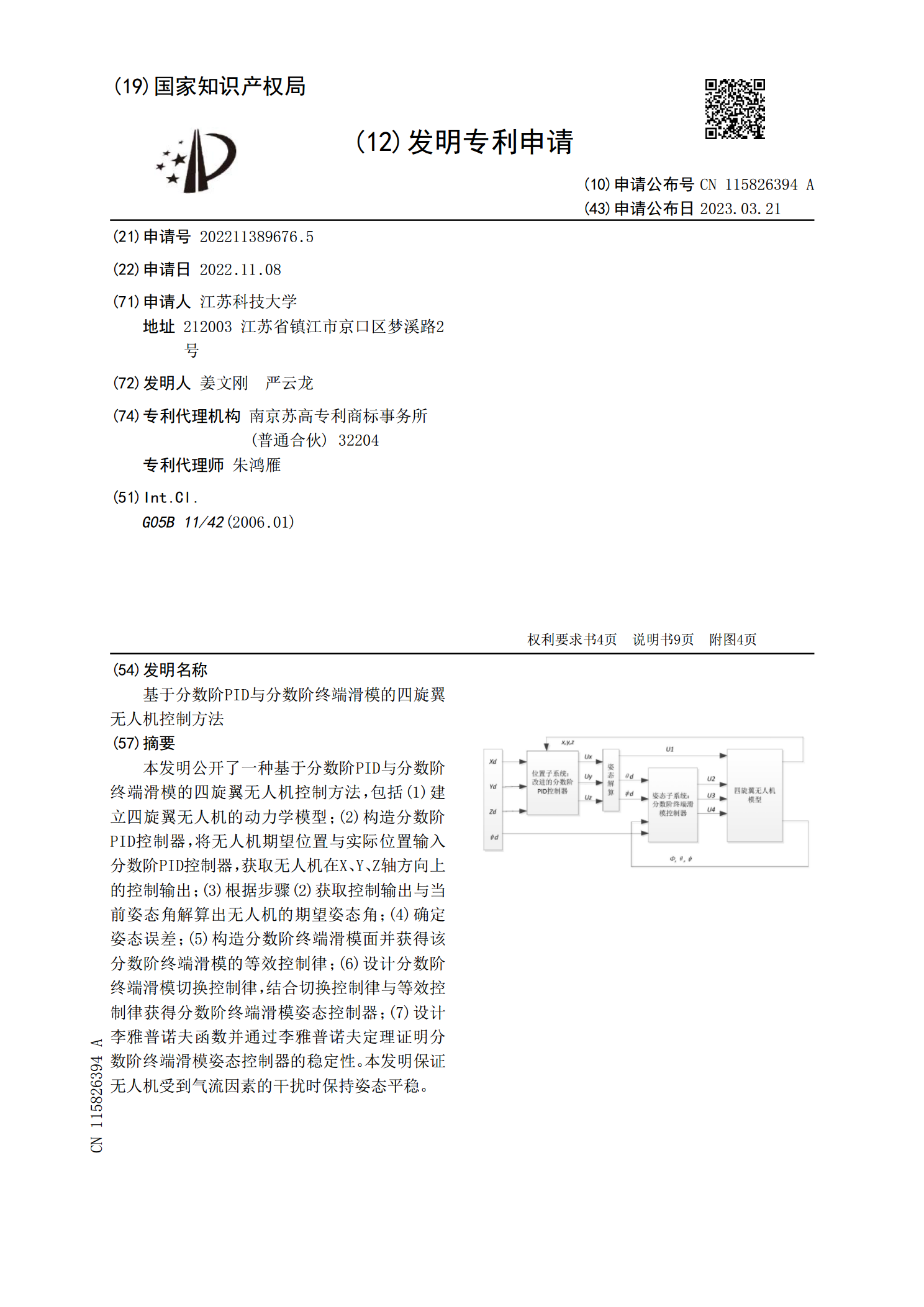
本发明公开了一种基于分数阶PID与分数阶终端滑模的四旋翼无人机控制方法,包括(1)建立四旋翼无人机的动力学模型;(2)构造分数阶PID控制器,将无人机期望位置与实际位置输入分数阶PID控制器,获取无人机在X、Y、Z轴方向上的控制输出;(3)根据步骤(2)获取控制输出与当前姿态角解算出无人机的期望姿态角;(4)确定姿态误差;(5)构造分数阶终端滑模面并获得该分数阶终端滑模的等效控制律;(6)设计分数阶终端滑模切换控制律,结合切换控制律与等效控制律获得分数阶终端滑模姿态控制器;(7)设计李雅普诺夫函数并通过李

基于分数阶PID的四旋翼飞行器控制.pptx
基于分数阶PID的四旋翼飞行器控制01添加章节标题四旋翼飞行器简介定义与结构工作原理应用领域分数阶PID控制算法分数阶PID定义分数阶PID控制器设计分数阶PID的优势与挑战基于分数阶PID的四旋翼飞行器控制策略控制目标与要求控制策略设计控制器参数整定实验验证与结果分析实验平台搭建实验过程与数据记录结果分析性能评估与优化建议结论与展望研究成果总结未来研究方向感谢观看

四旋翼无人机分数阶PID控制研究的开题报告.docx
四旋翼无人机分数阶PID控制研究的开题报告一、选题背景及意义近年来,无人机技术得到了快速发展,成为了航空领域中最重要的发展方向之一。其中,四旋翼无人机因其简单的结构、灵活的机动性和稳定的飞行特性而受到了广泛应用。但是,在飞行控制方面,四旋翼无人机飞行时存在机体姿态控制精度低、飞行稳定性差、悬停稳定性差等问题,这些问题在实际应用中会导致飞机无法正常使用或受控飞行性能下降,因此,研究四旋翼无人机飞行控制方案具有重要的理论和实践意义。PID控制器是常用的控制技术之一,但传统的PID控制器参数的设定通常基于满足二

四旋翼无人机分数阶PID控制研究的任务书.docx
四旋翼无人机分数阶PID控制研究的任务书任务书一、研究背景近年来,四旋翼无人机(PM-UAV)的应用越来越广泛。在军事、民用及科学研究等领域,PM-UAV都发挥着重要的作用。在PM-UAV的控制过程中,控制算法及控制调节器的准确性对飞行稳定和操作效果至关重要。传统PID控制算法在控制准确性、抗干扰等方面有很大的限制,而分数阶PID控制则具有更好的稳定性和鲁棒性,因此在PM-UAV控制中应用越来越广泛。因此,本研究将探索分数阶PID控制在PM-UAV控制中的应用效果。二、研究内容1.研究分数阶PID控制的基

基于分数阶PID滑模变结构的逆变器控制研究.pptx
汇报人:目录PARTONEPARTTWO分数阶微积分简介滑模变结构控制原理分数阶PID滑模变结构控制算法PARTTHREE逆变器工作原理逆变器控制目标逆变器控制策略实现PARTFOUR控制算法在逆变器中的实现控制算法的仿真验证控制算法在实际系统中的应用PARTFIVE实验设置与实验过程实验结果展示结果分析PARTSIX研究结论研究不足与展望THANKYOU