
确定可移动的设备的位置.pdf

努力****晓骞


1/10
2/10
3/10
4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
确定可移动的设备的位置.pdf
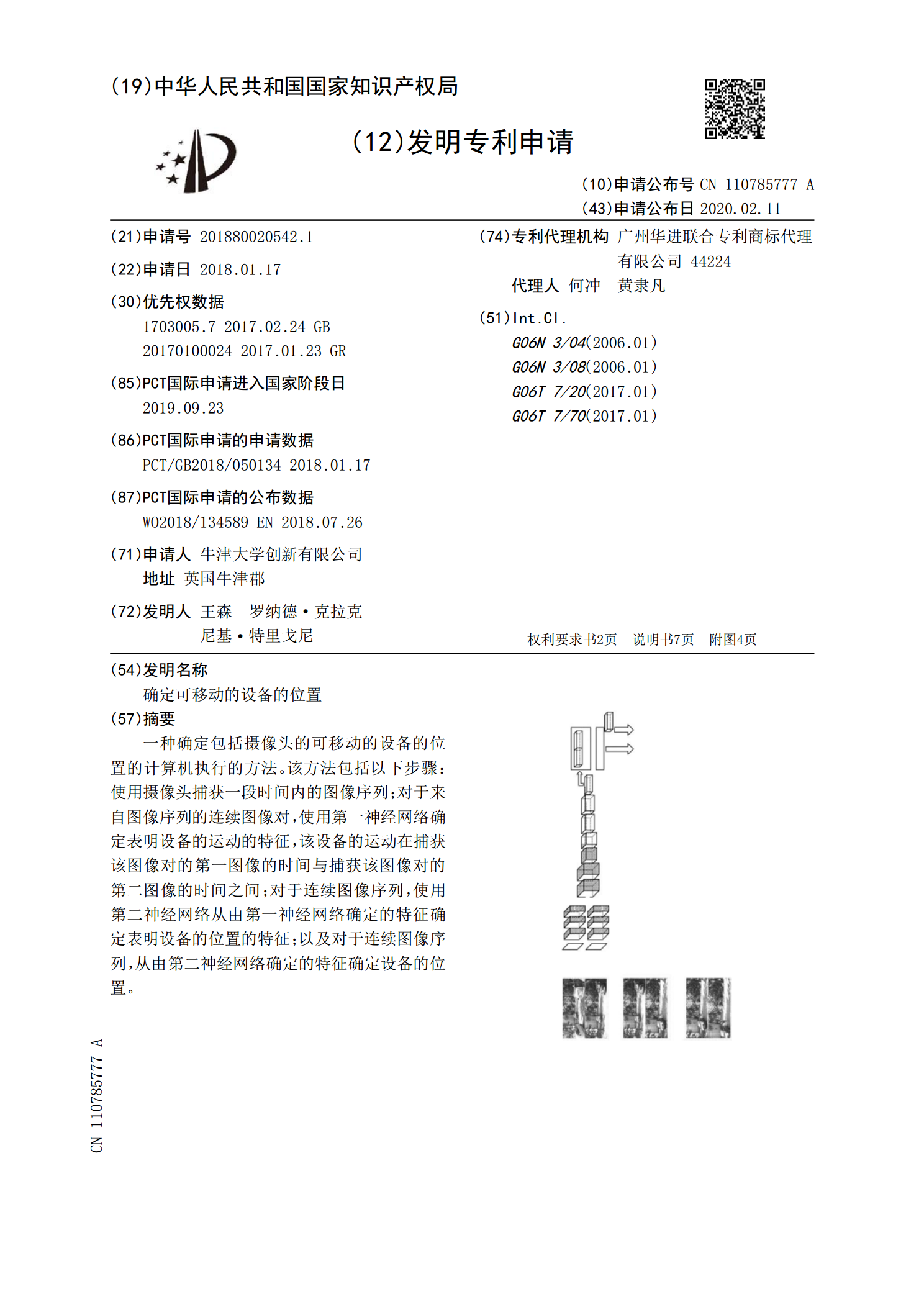
一种确定包括摄像头的可移动的设备的位置的计算机执行的方法。该方法包括以下步骤:使用摄像头捕获一段时间内的图像序列;对于来自图像序列的连续图像对,使用第一神经网络确定表明设备的运动的特征,该设备的运动在捕获该图像对的第一图像的时间与捕获该图像对的第二图像的时间之间;对于连续图像序列,使用第二神经网络从由第一神经网络确定的特征确定表明设备的位置的特征;以及对于连续图像序列,从由第二神经网络确定的特征确定设备的位置。
确定可移动的设备的位置.pdf
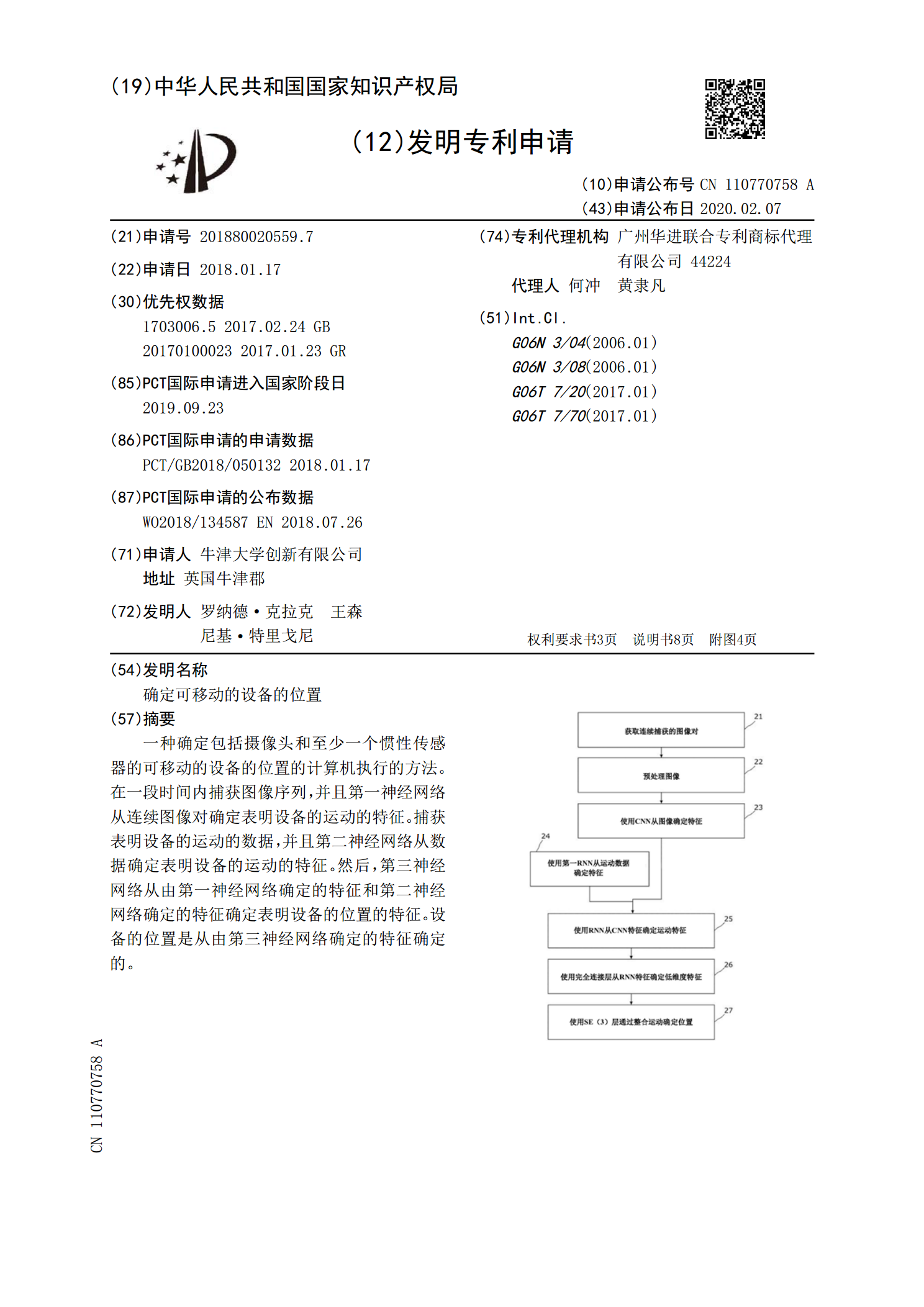
一种确定包括摄像头和至少一个惯性传感器的可移动的设备的位置的计算机执行的方法。在一段时间内捕获图像序列,并且第一神经网络从连续图像对确定表明设备的运动的特征。捕获表明设备的运动的数据,并且第二神经网络从数据确定表明设备的运动的特征。然后,第三神经网络从由第一神经网络确定的特征和第二神经网络确定的特征确定表明设备的位置的特征。设备的位置是从由第三神经网络确定的特征确定的。

用于确定可自动移动设备的位置的方法.pdf
本发明涉及一种用于确定可自动移动设备的位置的方法,该设备优选具有电动的移动轮,其中,设备具有障碍识别装置,其中,从设备的预先计算出的假定第一位置出发进一步计算出大量可能的位置和定向(质点6)并在设备相应地移动后根据此时占据的第二位置借助光学单元的测量结果将此前产生的质点之一按照预先规定的考虑概率的选择算法假定为设备的新位置。本发明建议对质点进行如下评估:为所计算出的质点云的最大延伸配备坐标系的第一轴并由此出发检测质点在另一个、即第二坐标轴方向上的偏差,然后将质点全部投影到第一坐标轴内并为这样检测的质点分布
一种可移动设备位置的确定方法、装置及电子设备.pdf
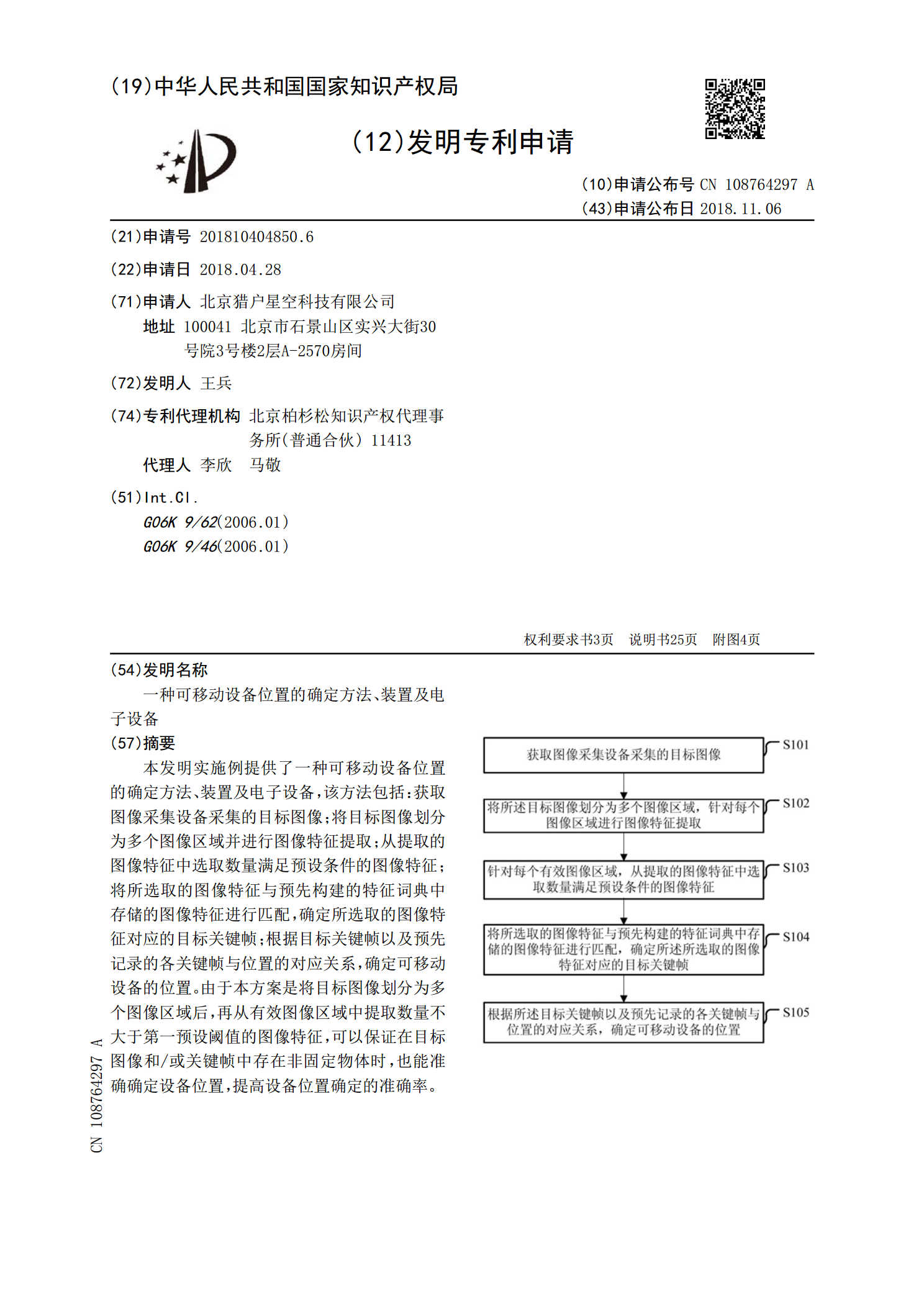
本发明实施例提供了一种可移动设备位置的确定方法、装置及电子设备,该方法包括:获取图像采集设备采集的目标图像;将目标图像划分为多个图像区域并进行图像特征提取;从提取的图像特征中选取数量满足预设条件的图像特征;将所选取的图像特征与预先构建的特征词典中存储的图像特征进行匹配,确定所选取的图像特征对应的目标关键帧;根据目标关键帧以及预先记录的各关键帧与位置的对应关系,确定可移动设备的位置。由于本方案是将目标图像划分为多个图像区域后,再从有效图像区域中提取数量不大于第一预设阈值的图像特征,可以保证在目标图像和/或关
确定移动设备在地理区域中的位置.pdf
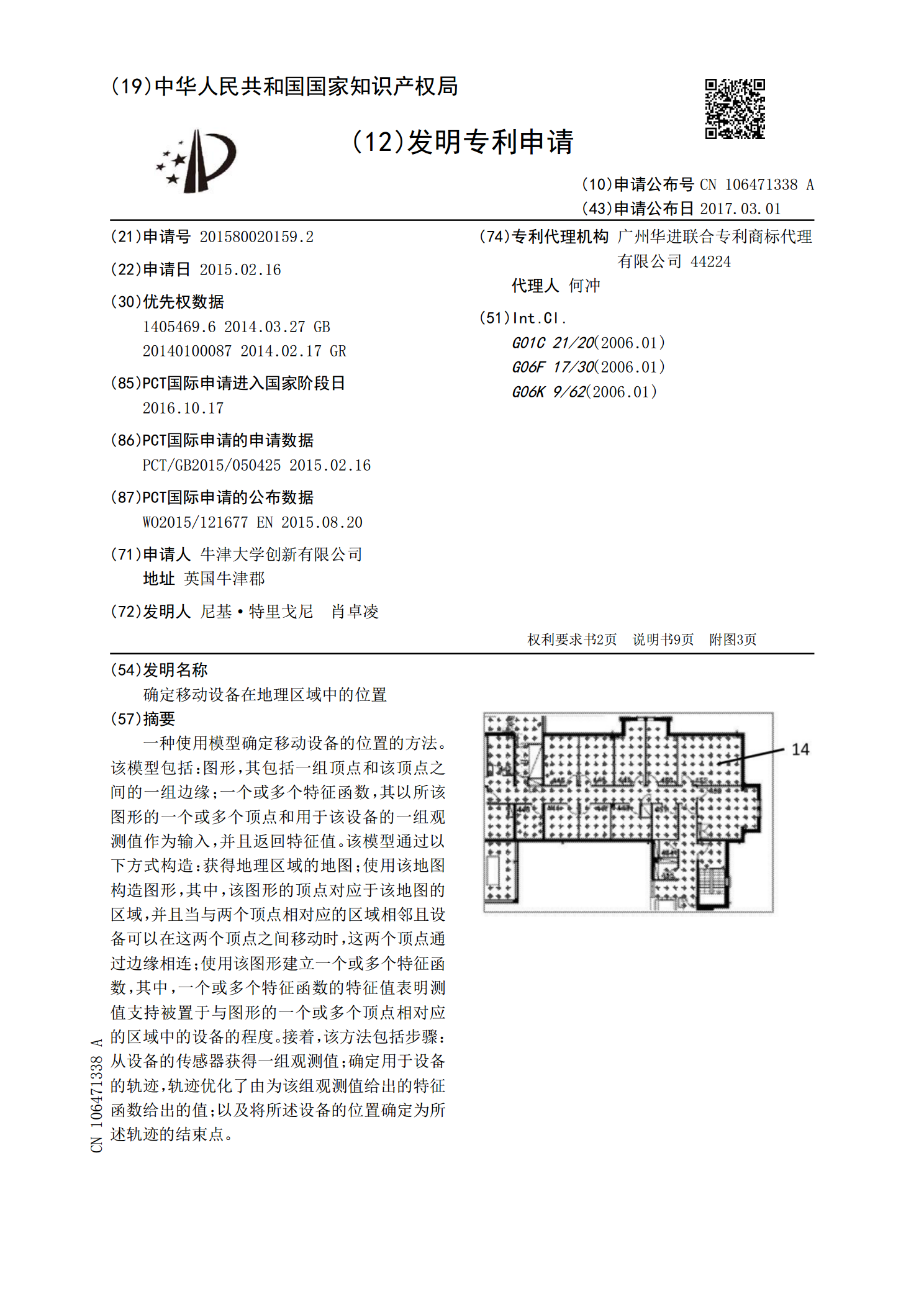
一种使用模型确定移动设备的位置的方法。该模型包括:图形,其包括一组顶点和该顶点之间的一组边缘;一个或多个特征函数,其以所该图形的一个或多个顶点和用于该设备的一组观测值作为输入,并且返回特征值。该模型通过以下方式构造:获得地理区域的地图;使用该地图构造图形,其中,该图形的顶点对应于该地图的区域,并且当与两个顶点相对应的区域相邻且设备可以在这两个顶点之间移动时,这两个顶点通过边缘相连;使用该图形建立一个或多个特征函数,其中,一个或多个特征函数的特征值表明测值支持被置于与图形的一个或多个顶点相对应的区域中的设备